技术特征:
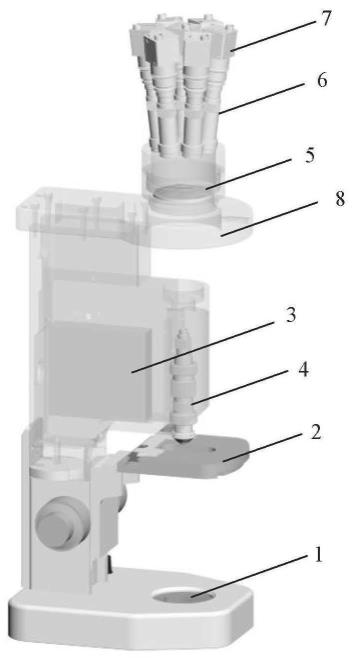
1.一种基于复眼结构的大视场连续变倍显微系统及方法,其特征在于,该大视场连续变倍显微系统由照明光源、载物台、光学成像模块、液体透镜驱动模块和镜架构成;照明光源用于提供照明光;载物台用于承载样本;光学成像模块包含主物镜、分光透镜、子目镜阵列和图像传感器阵列,用于对样本进行大视场连续变倍显微成像和图像采集,其中主物镜由若干液体透镜和固体透镜构成,子目镜阵列中每个子目镜结构相同,由若干液体透镜和固体透镜构成;液体透镜驱动模块用于为主物镜和子目镜中的液体透镜提供驱动信号;镜架用于支撑和连接显微系统的各个部件;该大视场连续变倍显微成像方法描述为:首先,为主物镜和子目镜阵列中的液体透镜置入一组初始信号,主物镜和子目镜的光焦度及放大率实现初始化,待测样本经过主物镜一次放大后形成中继像,中继像光束经过分光透镜后分割为若干子视场光束,子视场光束进入对应的子目镜并聚焦于图像传感器之上形成显微图像;然后,通过调控液体透镜的驱动信号,液体透镜光焦度发生变化,显微系统整体光焦度分配情况相应改变、放大倍率发生相应变化,在变倍过程中系统各组件结构参数和相对位置的数学关系以及成像倍率和视场变化的数学关系使得物像始终满足共轭条件、子视场之间始终存在交叠,通过实时采集图像传感器阵列的图像信号,并将图像进行校正和拼接,即可获得不同放大倍率下的大视场显微图像。2.根据权利要求1所述的一种基于复眼结构的大视场连续变倍显微系统及方法,其特征在于,所述的大视场连续变倍显微成像系统各组件结构参数和相对位置的数学关系为:所述的分光透镜的外表面由两圈子球表面构成,即中心子球表面和外圈子球表面,外圈子球表面由若干曲率半径相同的子球表面构成;分光透镜的内表面为一标准球面,分光透镜的内表面曲率半径r0可近似表示为:其中,h为外圈子球表面对应子目镜的中心光线与样本面的交点和中心子球表面对应子目镜的中心光线与样本面的交点间的距离,l为中继像与分光透镜的中心距离,β为主物镜放大倍率,x
p
为主物镜匹兹伐场曲;所述的光学成像模块中的子目镜阵列所包含的子目镜个数和图像传感器阵列所包含的图像传感器个数均与分光透镜外表面的子球表面个数相同,子目镜及所接图像传感器的中心轴线与对应分光透镜子球表面的中心轴线完全重合。3.根据权利要求1所述的一种基于复眼结构的大视场连续变倍显微系统及方法,其特征在于,所述的大视场连续变倍显微成像倍率和视场变化的数学关系为:低倍率工作模式下,主物镜、分光透镜中心子球表面对应透镜区域及相应的子目镜形成的物方线视场a1,主物镜、分光透镜单个外圈子球表面对应透镜区域及相应的子目镜形成的物方线视场a2,经拼接后显微系统的总物方线视场a,满足a1 2a2<a;高倍率工作模式下,主物镜、分光透镜中心子球表面对应透镜区域及相应的子目镜形成的物方线视场b1,主物镜、分光透镜单个外圈子球表面对应透镜区域及相应的子目镜形成的物方线视场b2,经拼接后显微系统的总物方线视场b,满足b1 2b2<b且b1<a1、b2<a2。
4.根据权利要求1所述的一种基于复眼结构的大视场连续变倍显微系统及方法,其特征在于,液体透镜通过外驱动改变界面曲率以实现光焦度变化,液体透镜类型可以是电润湿驱动的液体透镜、机械马达驱动的弹性薄膜液体透镜、介电泳力驱动的液体透镜、磁控液体透镜等。5.根据权利要求1所述的一种基于复眼结构的大视场连续变倍显微系统及方法,其特征在于,主物镜中的液体透镜个数m1和固体透镜个数n1须满足m1 n1≥1,每个子目镜中的液体透镜个数m2和固体透镜个数n2须满足m2 n2≥1,同时应保证m1 m2≥2。
技术总结
本发明提出一种基于复眼结构的大视场连续变倍显微系统及方法,该系统由照明光源、载物台、光学成像模块、液体透镜驱动模块和镜架构成,其中光学成像模块包含主物镜、分光透镜、子目镜阵列和图像传感器阵列,主物镜和子目镜由若干液体透镜和固体透镜构成。待测样本经过主物镜一次放大后形成中继像,中继像光束经过分光透镜后分割为若干子视场光束,子视场光束进入对应的子目镜并聚焦于图像传感器之上形成显微图像;通过调控液体透镜的驱动信号可以使得主物镜和子目镜的光焦度连续变化,从而使得系统放大倍率相应变化,通过实时采集图像传感器阵列的图像信号,并将图像进行校正和拼接,即可获得不同放大倍率下的大视场显微图像。像。像。
技术研发人员:刘超 王琼华 郑奕 江钊 徐近博
受保护的技术使用者:北京航空航天大学
技术研发日:2022.05.07
技术公布日:2022/7/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。