1.本发明属于车辆调试技术领域,尤其是涉及一种障碍物显示方法、装置、电子设备和可读存储介质。
背景技术:
2.目前基于嵌入式的前视传感器和前毫米波雷达的障碍物融合算法开发时,发现需检测的障碍物类别及交通参与元素适配场景繁多,在调试算法功能、性能时无法针对特定的场景进行反复复现,不同障碍物组成的场景也无法准确按设计需求组合,浪费大量实车调试资源,所以需要一种障碍物显示方法,可对多传感器采集到的数据进行实时和复现显示。
技术实现要素:
3.本发明实施例的目的在于提供一种障碍物显示方法、装置、电子设备和可读存储介质,从而解决现有技术中基于多传感器的障碍物融合算法调试时,存在数据复现困难的问题。
4.为了实现上述目的,本发明实施例提供了一种障碍物显示方法,包括:
5.获取车辆的障碍物检测传感器所采集的图片数据和日志数据;
6.将所述图片数据中每一帧图片与对应的所述日志数据相关联;
7.显示所述图片数据,其中所述日志数据中的障碍物参数在对应相关联的每一帧图片上显示;所述障碍物参数包括:障碍物坐标信息、障碍物物理信息、障碍物身份标识信息、障碍物测距信息、障碍物测速信息以及障碍物加速度信息中的至少一项。
8.可选地,所述障碍物检测传感器包括:前视传感器、前毫米波雷达以及融合模块;
9.所述图片数据包括:前视原始图片;
10.所述日志数据包括:前视检测结果日志、前毫米波雷达检测结果日志、车辆状态信息日志以及融合结果日志;所述融合结果日志为所述融合模块根据所述前视检测结果日志、所述前毫米波雷达检测结果日志以及所述车辆状态信息日志输出。
11.可选地,所述方法还包括:
12.在显示所述图片数据的界面上显示第一坐标平面,其中所述第一坐标平面上采用不同标记显示所述前视检测结果日志、所述前毫米波雷达检测结果日志、所述车辆状态信息日志以及所述融合结果日志中的所述障碍物坐标信息。
13.可选地,所述方法还包括:
14.将所述前视原始图片和所述前视检测结果日志中的车道线信息,转换为车道线坐标;
15.在所述第一坐标平面中显示所述车道线坐标。
16.可选地,将所述图片数据中每一帧图片与对应的所述日志数据相关联之后,所述方法还包括:
17.根据每一帧图片的帧号顺序,分别对所述前视原始图片、所述前视检测结果日志、所述前毫米波雷达检测结果日志、所述车辆状态信息日志以及所述融合结果日志进行回放,获得回放数据。
18.可选地,所述方法还包括:
19.对所述回放数据中的障碍物状态信息进行分析,获得障碍物状态对比结果;所述障碍物状态信息包括:所述障碍物测距信息、所述障碍物测速信息以及所述障碍物加速度信息中的至少一项;
20.在显示所述图片数据的界面上显示第二坐标平面,其中所述第二坐标平面上显示所述障碍物状态对比结果。
21.可选地,对所述回放数据中的障碍物状态信息进行分析,获得障碍物状态对比结果,包括:
22.根据所述回放数据,获得前视检测结果、前毫米波雷达检测结果以及融合结果;
23.分别将所述前视检测结果和所述前毫米波雷达检测结果中的所述障碍物状态信息与所述融合结果中的所述障碍物状态信息进行对比,获得所述障碍物状态对比结果。
24.可选地,所述方法还包括:
25.根据所述回放数据,监控并记录所述融合模块的运行周期和运行状态,获取记录结果;
26.在显示所述图片数据的界面上显示所述记录结果。
27.本发明实施例还提供一种障碍物显示装置,包括:
28.获取模块,用于获取车辆的障碍物检测传感器所采集的图片数据和日志数据;
29.关联模块,用于将所述图片数据中每一帧图片与对应的所述日志数据相关联;
30.第一显示模块,用于显示所述图片数据,其中所述日志数据中的障碍物参数在对应相关联的每一帧图片上显示;所述障碍物参数包括:障碍物坐标信息、障碍物物理信息、障碍物身份标识信息、障碍物测距信息、障碍物测速信息以及障碍物加速度信息中的至少一项。
31.可选地,所述障碍物检测传感器包括:前视传感器、前毫米波雷达以及融合模块;
32.所述图片数据包括:前视原始图片;
33.所述日志数据包括:前视检测结果日志、前毫米波雷达检测结果日志、车辆状态信息日志以及融合结果日志;所述融合结果日志为所述融合模块根据所述前视检测结果日志、所述前毫米波雷达检测结果日志以及所述车辆状态信息日志输出。
34.可选地,所述装置还包括:
35.第二显示模块,用于在显示所述图片数据的界面上显示第一坐标平面,其中所述第一坐标平面上采用不同标记显示所述前视检测结果日志、所述前毫米波雷达检测结果日志、所述车辆状态信息日志以及所述融合结果日志中的所述障碍物坐标信息。
36.可选地,所述装置还包括:
37.转换模块,用于将所述前视原始图片和所述前视检测结果日志中的车道线信息,转换为车道线坐标;
38.第三显示模块,用于在所述第一坐标平面中显示所述车道线坐标。
39.可选地,所述装置还包括:
40.回放模块,用于根据每一帧图片的帧号顺序,分别对所述前视原始图片、所述前视检测结果日志、所述前毫米波雷达检测结果日志、所述车辆状态信息日志以及所述融合结果日志进行回放,获得回放数据。
41.可选地,所述装置还包括:
42.对比模块,用于对所述回放数据中的障碍物状态信息进行分析,获得障碍物状态对比结果;所述障碍物状态信息包括:所述障碍物测距信息、所述障碍物测速信息以及所述障碍物加速度信息中的至少一项;
43.第四显示模块,用于在显示所述图片数据的界面上显示第二坐标平面,其中所述第二坐标平面上显示所述障碍物状态对比结果。
44.可选地,所述对比模块具体用于:
45.根据所述回放数据,获得前视检测结果、前毫米波雷达检测结果以及融合结果;
46.分别将所述前视检测结果和所述前毫米波雷达检测结果中的所述障碍物状态信息与所述融合结果中的所述障碍物状态信息进行对比,获得所述障碍物状态对比结果。
47.可选地,所述装置还包括:
48.监控模块,用于根据所述回放数据,监控并记录所述融合模块的运行周期和运行状态,获取记录结果;
49.第五显示模块,用于在显示所述图片数据的界面上显示所述记录结果。
50.本发明实施例还提供一种电子设备,包括:处理器、存储器及存储在所述存储器上并可在所述处理器上运行的程序,所述程序被所述处理器执行时实现如上述的障碍物显示方法。
51.本发明实施例还提供一种可读存储介质,所述可读存储介质上存储有程序,所述程序被处理器执行时实现如上述的障碍物显示方法。
52.本发明的上述技术方案至少具有如下有益效果:
53.上述方案中,通过获取车辆的障碍物检测传感器所采集的图片数据和日志数据;将所述图片数据中每一帧图片与对应的所述日志数据相关联;显示所述图片数据,其中所述日志数据中的障碍物参数在对应相关联的每一帧图片上显示;所述障碍物参数包括:障碍物坐标信息、障碍物物理信息、障碍物身份标识信息、障碍物测距信息、障碍物测速信息以及障碍物加速度信息中的至少一项,通过一次采集,实现多次显示,从而在障碍物融合算法离线调试时实现数据复现,节省实车调试时间,大大提升开发效率。
附图说明
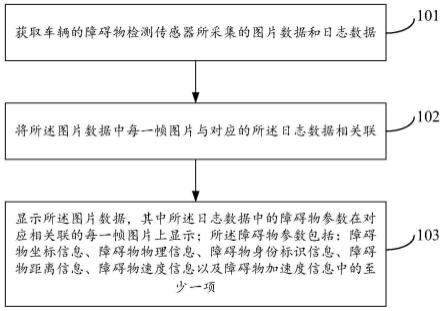
54.图1为本发明实施例的障碍物显示方法的步骤示意图;
55.图2为本发明实施例的障碍物显示装置的示意图。
具体实施方式
56.为使本发明要解决的技术问题、技术方案和优点更加清楚,下面将结合附图及具体实施例进行详细描述。
57.本发明实施例针对现有技术中基于多传感器的障碍物融合算法调试时,存在数据复现困难的问题,提供一种障碍物显示方法、装置、电子设备和可读存储介质。
58.如图1所示,本发明实施例提供了一种障碍物显示方法,包括:
59.步骤101,获取车辆的障碍物检测传感器所采集的图片数据和日志数据;
60.需要说明的是,本发明实施例中涉及到的车辆可以是具备自动驾驶功能的车辆。
61.步骤102,将图片数据中每一帧图片与对应的日志数据相关联;
62.这里,获取日志数据时,以图片数据的帧号为主线的时间对齐方式,将图片数据中的每一帧图片与对应的日志数据相关联。
63.步骤103,显示图片数据,其中日志数据中的障碍物参数在对应相关联的每一帧图片上显示;障碍物参数包括:障碍物坐标信息、障碍物物理信息、障碍物身份标识信息、障碍物测距信息、障碍物测速信息以及障碍物加速度信息中的至少一项。
64.这里,图片数据显示在界面上,并且,日志数据中的障碍物参数在对应相关联的每一帧图片上显示。
65.另外,障碍物物理信息为障碍物的长宽信息。
66.本发明实施例,通过获取车辆的障碍物检测传感器所采集的图片数据和日志数据;将图片数据中每一帧图片与对应的日志数据相关联;显示图片数据,其中日志数据中的障碍物参数在对应相关联的每一帧图片上显示;障碍物参数包括:障碍物坐标信息、障碍物物理信息、障碍物身份标识信息、障碍物测距信息、障碍物测速信息以及障碍物加速度信息中的至少一项,通过一次采集,实现多次显示,从而在障碍物融合算法离线调试时实现数据复现,节省实车调试时间,大大提升开发效率。
67.可选地,障碍物检测传感器包括:前视传感器、前毫米波雷达以及融合模块;
68.图片数据包括:前视原始图片;
69.日志数据包括:前视检测结果日志、前毫米波雷达检测结果日志、车辆状态信息日志以及融合结果日志;融合结果日志为融合模块根据前视检测结果日志、前毫米波雷达检测结果日志以及车辆状态信息日志输出。
70.需要说明的是,前视传感器为前视摄像头。融合模块执行融合算法,该融合算法基于前视传感器和前毫米波雷达采集的图片数据和日志数据,感知检测障碍物。
71.可选地,方法还包括:
72.在显示图片数据的界面上显示第一坐标平面,其中第一坐标平面上采用不同标记显示前视检测结果日志、前毫米波雷达检测结果日志、车辆状态信息日志以及融合结果日志中的障碍物坐标信息。
73.这里,采用不同标记将前视检测结果日志、前毫米波雷达检测结果日志、车辆状态信息日志以及融合结果日志中的障碍物坐标信息分别投影到第一坐标平面上,该第一坐标平面是以距离为横纵坐标的车辆坐标系,还显示当前车辆位置。例如,采用红色圆圈表示前视检测结果日志中的障碍物坐标信息、黄色圆圈表示前毫米波雷达检测结果日志中的障碍物坐标信息,以及绿色圆圈表示融合结果日志中的障碍物坐标信息。
74.需要说明的是,还可以通过融合模块输出障碍物身份标识信息,将对应身份标识信息的障碍物坐标信息和障碍物测速信息实时显示在第一坐标平面上。
75.可选地,方法还包括:
76.将前视原始图片和前视检测结果日志中的车道线信息,转换为车道线坐标;
77.在第一坐标平面中显示车道线坐标。
78.这里,本发明实施例在第一坐标平面上,还可以将车道线显示出来。
79.进一步地,本发明实施例还可以在前视原始图片上,采用标记形式显示车道线。以及,在前视原始图片上,通过帧号对齐的方式,显示障碍物身份标识信息、障碍物的长宽信息、障碍物测距信息、障碍物测速信息以及障碍物加速度信息。其中,障碍物测距信息、障碍物测速信息以及障碍物加速度信息为车辆前方的主要目标障碍物。
80.可选地,步骤102,将图片数据中每一帧图片与对应的日志数据相关联之后,方法还包括:
81.根据每一帧图片的帧号顺序,分别对前视原始图片、前视检测结果日志、前毫米波雷达检测结果日志、车辆状态信息日志以及融合结果日志进行回放,获得回放数据。
82.需要说明的是,通过每一帧图片的帧号顺序,实现连续图片回放,形成回放视频。以及,通过前视检测结果日志、前毫米波雷达检测结果日志、车辆状态信息日志以及融合结果日志相关联的每一帧图片的帧号顺序,进行数据输出回灌。
83.还需要说明的是,回放数据具有实时性,实时对日志数据和日志数据进行回放。
84.可选地,方法还包括:
85.对回放数据中的障碍物状态信息进行分析,获得障碍物状态对比结果;障碍物状态信息包括:障碍物测距信息、障碍物测速信息以及障碍物加速度信息中的至少一项;
86.在显示图片数据的界面上显示第二坐标平面,其中第二坐标平面上显示障碍物状态对比结果。
87.这里,障碍物测距信息包括障碍物横纵向测距信息;障碍物测速信息包括障碍物横纵向测速信息。
88.可选地,对回放数据中的障碍物状态信息进行分析,获得障碍物状态对比结果,包括:
89.根据回放数据,获得前视检测结果、前毫米波雷达检测结果以及融合结果;
90.分别将前视检测结果和前毫米波雷达检测结果中的障碍物状态信息与融合结果中的障碍物状态信息进行对比,获得障碍物状态对比结果。
91.这里,通过实时的回放数据,分别将融合结果中的障碍物状态信息与前视检测结果、前毫米波雷达检测结果中的障碍物状态信息进行实时对比分析计算,以曲线形式,通过每一帧图片的帧号顺序,在第二坐标平面上进行显示。
92.需要说明的是,在障碍物状态信息为障碍物测距信息时,第二坐标平面的纵坐标表示距离,即不同障碍物检测传感器采集到的障碍物与车辆之间的距离信息,横坐标表示时间。
93.在障碍物状态信息为障碍物测速信息时,第二坐标平面的纵坐标表示速度,即不同障碍物检测传感器采集到的障碍物的速度信息,横坐标表示时间。
94.在障碍物状态信息为障碍物加速度信息时,第二坐标平面的纵坐标表示加速度,即不同障碍物检测传感器采集到的障碍物的加速度信息,横坐标表示时间。
95.可选地,方法还包括:
96.根据回放数据,监控并记录融合模块的运行周期和运行状态,获取记录结果;
97.在显示图片数据的界面上显示记录结果。
98.需要说明的是,本发明实施例可以在获取到回放数据时,启动融合模块,开始执行
融合算法,监控该融合算法的运行周期和运行状态,并进行记录和显示;以及,记录融合模块的运行时间和各个功能函数的运行时间,并进行显示。
99.通过本发明实施例,实现融合算法开发,融合模块根据图片数据和日志数据,进行实时算法的功能性调试,脱离实车调试,实现本地离线开发,大大提升开发效率,同时减少实车使用时间,还可以为决策、规划以及控制其他自动驾驶软件模块的调试节省了大量的实车调试时间。
100.进一步地,还可以将记录结果显示在前视原始图片上。
101.综上,本发明实施例的障碍物显示方法,实现了数据获取、数据回放、算法调试以及算法问题分析整改,从而支持融合算法开发。
102.如图2所示,本发明实施例还提供一种障碍物显示装置,包括:
103.获取模块201,用于获取车辆的障碍物检测传感器所采集的图片数据和日志数据;
104.关联模块202,用于将图片数据中每一帧图片与对应的日志数据相关联;
105.第一显示模块203,用于显示图片数据,其中日志数据中的障碍物参数在对应相关联的每一帧图片上显示;障碍物参数包括:障碍物坐标信息、障碍物物理信息、障碍物身份标识信息、障碍物测距信息、障碍物测速信息以及障碍物加速度信息中的至少一项。
106.本发明实施例,通过获取车辆的障碍物检测传感器所采集的图片数据和日志数据;将图片数据中每一帧图片与对应的日志数据相关联;显示图片数据,其中日志数据中的障碍物参数在对应相关联的每一帧图片上显示;障碍物参数包括:障碍物坐标信息、障碍物物理信息、障碍物身份标识信息、障碍物测距信息、障碍物测速信息以及障碍物加速度信息中的至少一项,通过一次采集,实现多次显示,从而在障碍物融合算法离线调试时实现数据复现,节省实车调试时间,大大提升开发效率。
107.可选地,障碍物检测传感器包括:前视传感器、前毫米波雷达以及融合模块;
108.图片数据包括:前视原始图片;
109.日志数据包括:前视检测结果日志、前毫米波雷达检测结果日志、车辆状态信息日志以及融合结果日志;融合结果日志为融合模块根据前视检测结果日志、前毫米波雷达检测结果日志以及车辆状态信息日志输出。
110.可选地,装置还包括:
111.第二显示模块,用于在显示图片数据的界面上显示第一坐标平面,其中第一坐标平面上采用不同标记显示前视检测结果日志、前毫米波雷达检测结果日志、车辆状态信息日志以及融合结果日志中的障碍物坐标信息。
112.可选地,装置还包括:
113.转换模块,用于将前视原始图片和前视检测结果日志中的车道线信息,转换为车道线坐标;
114.第三显示模块,用于在第一坐标平面中显示车道线坐标。
115.可选地,装置还包括:
116.回放模块,用于根据每一帧图片的帧号顺序,分别对前视原始图片、前视检测结果日志、前毫米波雷达检测结果日志、车辆状态信息日志以及融合结果日志进行回放,获得回放数据。
117.可选地,装置还包括:
118.对比模块,用于对回放数据中的障碍物状态信息进行分析,获得障碍物状态对比结果;障碍物状态信息包括:障碍物测距信息、障碍物测速信息以及障碍物加速度信息中的至少一项;
119.第四显示模块,用于在显示图片数据的界面上显示第二坐标平面,其中第二坐标平面上显示障碍物状态对比结果。
120.可选地,对比模块具体用于:
121.根据回放数据,获得前视检测结果、前毫米波雷达检测结果以及融合结果;
122.分别将前视检测结果和前毫米波雷达检测结果中的障碍物状态信息与融合结果中的所述障碍物状态信息进行对比,获得障碍物状态对比结果。
123.可选地,装置还包括:
124.监控模块,用于根据回放数据,监控并记录融合模块的运行周期和运行状态,获取记录结果;
125.第五显示模块,用于在显示图片数据的界面上显示记录结果。
126.需要说明的是,本发明实施例提供的障碍物显示装置是能够执行上述的障碍物显示方法的装置,则上述的障碍物显示方法的所有实施例均适用于该装置,且能达到相同或者相似的技术效果。
127.本发明实施例还提供一种电子设备,包括:处理器、存储器及存储在存储器上并可在处理器上运行的程序,程序被处理器执行时实现如上述的障碍物显示方法。
128.本发明实施例还提供一种可读存储介质,可读存储介质上存储有程序,程序被处理器执行时实现如上述的障碍物显示方法。
129.其中,处理器为上述实施例中的电子设备中的处理器。可读存储介质,包括计算机可读存储介质,如计算机只读存储器(read-only memory,简称rom)、随机存取存储器(random access memory,简称ram)、磁碟或者光盘等。
130.以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明所述原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。