1.本发明属于电子设备测量技术领域,具体涉及一种基于钽电容电容损耗检测的自动测量方法。
背景技术:
2.为确保钽电容的质量和可靠性,生产过程中需要对其进行性能测试。目前对钽电容的性能检测主要包括电容损耗检测及漏电流检测,由于钽电容体积较小,钽电容检测过程中需由人工佩戴放大镜采用鳄鱼夹连接电极与检测仪器,不仅极大地耗费人力和精力,而且操作不便、工作效率低。
技术实现要素:
3.基于上述问题,本发明提出基于钽电容电容损耗检测的自动测量方法,针对钽电容的性质,实现钽电容自动检测,达到解放人工的目的。
4.本发明采用的技术方案是,一种基于钽电容电容损耗检测的自动测量方法,包括以下步骤:s1参数设置:在上位机软件上进行参数设置,并对对应设备进行初始化;s2识别待测件:工控机指示机械手到达拍照位,给视觉系统发出识别待测件信号,视觉系统对待测件进行拍照,根据所拍照片进行分析、匹配,并将匹配结果放入集合中发给工控机;s3定位待测件:工控机对集合进行解析,得到识别出的带有坐标和方向信息的待测件个数k;s4吸取待测件:工控机将k个待测件的信息存入队列,每次从队首获取一个目标待测件的信息,指示机械手前往对应目标待测件所在坐标,将目标待测件吸起放置于电容测试仪测试位;s5校正方向:在吸取往电容测试仪测试位过程中,机械手根据待测件的方向信息旋转对应的角度,以正确将待测件放置于电容测试仪测试位上;s6测试:电容测试仪执行测试操作,上位机软件解析从电容测试仪发送过来的原始测试数据,得到电容值和损耗值。
5.优选地,所述步骤s1中参数设置包括:器件基本信息、电容信息、损耗信息和漏电流信息。
6.优选地,所述视觉系统包括工业相机、光源和xx软件,步骤s2识别待测件时,触发光源,启动已作标定的ccd摄像头获取电容源图像,并对源图像进行预处理:c1:bgr转hsv;c2:非线性空间滤波,双边滤波;c3:增强对比度;c4:形态学开闭运算;
c5:canny边缘检测,获取轮廓,进行轮廓绘制优选地,所述步骤s3定位待测件包括以下步骤:d1:对待测件目标面进行模板匹配,过滤非目标检测面的待测件;d2:按顺序将匹配到的待测件进行标记(1、2、3...);d3:计算目标待测件的中心坐标和偏移角度;d4:将图像像素坐标转化成机器人坐标,并以字符串形式保存到数组对中;d5:与工控机进行socket通信,实现待测件位置坐标实时传输。
7.优选地,所述步骤s4中若发现k=0,标志未识别出任何信息,则工控机控制装有待测件的振动盘执行1次振动,使待测件翻面,直到集合中存有待测件的坐标信息。
8.优选地,所述步骤s4中,工控机通过负压表的压差,判断目标待测件是否确是被成功吸起,若判断没吸起,则重新到坐标吸取待测件,如此反复3次未吸起,则工控机控制报警系统发出警报。
9.优选地,所述步骤s6中上位机软件解析从漏电流测试仪发送过来的原始测试数据,根据步骤s1填写的参数判断待测件是否合格,并向机械手发出指示将待测件吸取后放置在合格区或不合格区。
10.优选地,所述测试完成后,从步骤s4重复操作,若队列中没有待测件信息,则机械手前往拍照位通过视觉系统重新识别待测件坐标和方位信息集合。
11.相较现有技术,本发明的有益效果是:本发明通过上位机软件、工控机、机械手和视觉系统的结合,实现对钽电容电容损耗自动化测量,达到解放人工、提高效率的目的。其中,本发明识别钽电容的方向和位置,不仅对目标电容精准定位,而且对电容目标面进行模板匹配,并通过计算目标电容的中心坐标和偏移角度,自动摆正钽电容的方向,使目标电容的电极与电容测试仪测试位匹配,整个过程完全自动化操作,大大提高了小体积钽电容测量的效率和质量;另外,本发明通过对电容目标面的匹配,判断机械手是否进行吸取,在标志未识别信息时,通过工控机控制振动装载待测钽电容的料盘,实现钽电容自动翻面,相较人工识别的方式,更加快速简便,同时通过压差判断机械手是否将钽电容成功吸取,保证测量的有效性。
附图说明
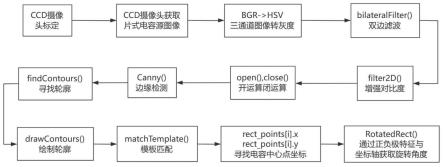
12.图1为本发明目标电容中心坐标及旋转角度流程图;图2为本发明图像预处理示意图。
具体实施方式
13.以下将结合说明书附图对本发明进一步解释说明,以便于本领域专业技术人员更好地理解。
14.实施例1如图1-2所示,一种基于钽电容电容损耗检测的自动测量方法,包括以下步骤:s1参数设置:在上位机软件上进行参数设置,并对对应设备进行初始化;s2识别待测件:工控机指示机械手到达拍照位,给视觉系统发出识别待测件信号,视觉系统对待测件进行拍照,根据所拍照片进行分析、匹配,并将匹配结果放入集合中发给
工控机;s3定位待测件:工控机对集合进行解析,得到识别出的带有坐标和方向信息的待测件个数k;s4吸取待测件:工控机将k个待测件的信息存入队列,每次从队首获取一个目标待测件的信息,指示机械手前往对应目标待测件所在坐标,将目标待测件吸起放置于电容测试仪测试位;s5校正方向:在吸取往电容测试仪测试位过程中,机械手根据待测件的方向信息旋转对应的角度,以正确将待测件放置于电容测试仪测试位上;s6测试:电容测试仪执行测试操作,上位机软件解析从电容测试仪发送过来的原始测试数据,得到电容值和损耗值。
15.优选地,所述步骤s1中参数设置包括:器件基本信息、电容信息、损耗信息和漏电流信息;其中,基本信息包括器件型号和器件编号;电容信息包括标准电容值、电容量单位和允许误差;损耗信息包括允许最大损耗;漏电流信息包括漏电流单位、允许最大漏电流、测试电压、充电电流、充电时长、延迟测试时间。
16.优选地,所述视觉系统包括工业相机、光源和图像识别软件,步骤s2识别待测件时,触发光源,启动已作标定的ccd摄像头获取电容源图像,并对源图像进行预处理:c1:bgr转hsv;c2:非线性空间滤波,双边滤波;c3:增强对比度;c4:形态学开闭运算;c5:canny边缘检测,获取轮廓,进行轮廓绘制优选地,所述步骤s3定位待测件包括以下步骤:d1:对待测件目标面进行模板匹配,过滤非目标检测面的待测件;d2:按顺序将匹配到的待测件进行标记(1、2、3...);d3:计算目标待测件的中心坐标和偏移角度;d4:将图像像素坐标转化成机器人坐标,并以字符串形式保存到数组对中;d5:与工控机进行socket通信,实现待测件位置坐标实时传输。
17.优选地,所述步骤s4中若发现k=0,标志未识别出任何信息,则工控机控制装有待测件的振动盘执行1次振动,使待测件翻面,直到集合中存有待测件的坐标信息。在此过程中,若振动盘每振动3次未识别到待测件的坐标信息,工控机控制料仓振动1次,将料仓中待测件送往振动盘中,若粮仓连续振动了3次(即振动盘连续振动了9次)视觉系统均未识别出任何待测件的坐标信息,工控机则控制报警系统发出警报声,以此提醒操作员往料仓里添加待测件。
18.优选地,所述步骤s4中,工控机通过负压表的压差,判断目标待测件是否确是被成功吸起,若判断没吸起,则重新到坐标吸取待测件,如此反复3次未吸起,则工控机控制报警系统发出警报。
19.优选地,所述步骤s6中上位机软件收到钽电容到达漏电流测试仪测试位信号后,先控制漏电流执行充电、测试、放电操作,然后解析从漏电流测试仪发送过来的原始测试数据,得到漏电流值,根据步骤s1填写的参数判断待测件电容值、损耗值和漏电流值分别是否
合格的结论,并将电容值、损耗值、漏电流值以及是否合格的结论存入表格,并向机械手发出指示将待测件吸取后放置在合格区或不合格区。
20.优选地,所述测试完成后,从步骤s4重复操作,若队列中没有待测件信息,则机械手前往拍照位通过视觉系统重新识别待测件坐标和方位信息集合。
21.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内,因此,本发明的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。