1.本实用新型涉及印刷电路板的光刻机领域,特别涉及一种全自动双面数字光刻机。
背景技术:
2.pcb(printed circuit board),中文名称为印制电路板,又称印刷线路板,是重要的电子部件,是电子元器件的支撑体,是电子元器件电气相互连接的载体,由于它是采用电子印刷术制作的,故被称为印刷电路板。
3.光刻机又名掩模对准曝光机、曝光系统、光刻系统等,采用类似照片冲印的技术,把掩膜版上的精细图形通过光线的曝光印制到印刷电路板上。
4.为了适应电子产品智能化和小型化的发展,电子电路不再只是在印刷电路板的单面进行曝光处理,而通常需要对印刷电路板的双面进行电子电路的曝光处理。
5.然而,目前对印刷电路板进行双面处理时,通常需要两台曝光机,这种双面曝光的方式虽然实现了双面曝光的自动化,但是整个自动化系统占用空间大,需要两个曝光系统分别曝光。
技术实现要素:
6.本实用新型的主要目的在于提出一种全自动双面数字光刻机,旨在解决上述背景技术中所提出的技术问题。
7.为实现上述目的,本实用新型提出一种全自动双面数字光刻机,第一输送线、第二输送线和第三输送线,所述第二输送线和所述第三输送线分别位于所述第一输送线的两端并与其呈相交设置,所述第一输送线的一端设有第一分板机构,另一端设有第二分板机构,所述第一分板机构用于将位于所述第一输送线上的工件转移至所述第二输送线上,所述第二分板机构用于将位于所述第一输送线上的工件转移至所述第三输送线上;
8.所述第二输送线与所述第三输送线之间设有曝光机,所述曝光机的相对两侧设有第一曝光平台和第二曝光平台,所述第一曝光平台位于所述第二输送线与所述曝光机之间,所述第二曝光平台位于所述第三输送线与所述曝光机之间,所述第一曝光平台与所述第二曝光平台均可移动至所述曝光机的下方;
9.所述第一曝光平台的上方设有第一机械手,所述第二曝光平台的上方设有第二机械手,所述第一机械手用于将所述第二输送线上的工件转移至所述第一曝光平台上以及用于将曝光后的工件从所述第一曝光平台上转移至所述第一输送线上,所述第二机械手用于将所述第三输送线上的工件转移至所述第二曝光平台上以及用于将曝光后的工件从所述第二曝光平台上转移至所述第一输送线上;
10.所述第一输送线上设有翻板机,所述翻板机用于将经所述第一机械手转从所述第一曝光平台转移至所述第一输送线上的工件翻转预设角度。
11.在一些实施例中,所述第一分板机构与所述第二分板机构的结构相同,其均包括
有第一驱动模组和沿竖直方向间隔设置的多个推杆,所述多个推杆分别与所述第一驱动模组传动连接,所述第一驱动模组用于驱动所述多个推杆沿竖直方向移动,以及用于驱动所述多个推杆沿所述第二输送线的分布方向移动。
12.在一些实施例中,还包括设于所述第一输送线下方的第一止挡机构和第二止挡机构,所述第一止挡机构用于将所述第一输送线上的工件止挡于第一预设位置,所述第二止挡机构用于将所述第一输送线上的工件止挡于第二预设位置;
13.其中,所述工件于所述第一预设位置,所述第一分板机构将所述工件转移至所述第二输送线上,所述工件于所述第二预设位置时,所述第二分板机构将所述工件转移至所述第三输送线上。
14.在一些实施例中,所述第一止挡机构与所述第二止挡机构的结构相同,其均包括有第二驱动模组和沿竖直方向间隔设置的多个挡杆,所述第二驱动模组用于驱动所述多个挡杆沿竖直方向移动。
15.在一些实施例中,所述第一机械手与所述第二机械手结构相同,其均包括有进料移载机构和出料移载机构,所述进料移载机构包括第三驱动模组和多个第一吸附组件,所述出料移载机构包括第四驱动模组和多个第二吸附组件;
16.其中,所述第三驱动模组用于驱动所述多个第一吸附组件沿竖直方向移动,以及用于驱动所述多个第一吸附组件沿所述第一输送线的分布方向移动,所述第四驱动模组用于驱动所述多个第二吸附组件沿所述竖直方向移动,以及用于驱动所述多个第二吸附组件沿所述第二输送线的分布方向移动。
17.在一些实施例中,还包括第一定位机构和第二定位机构,所述第一定位机构设于所述第二输送线上,所述第二定位机构设于所述第三输送线上,所述第一定位机构用于对位于所述第二输送线上的工件进行定位,所述第二定位机构用于对位于所述第三输送线上的工件进行定位。
18.在一些实施例中,所述第一定位机构与所述第二定位机构的结构相同,其均包括有两间隔设置的第一夹持组件和第二夹持组件,所述第一夹持组件包括第五驱动模组和沿竖直方向间隔设置的多个第一夹持杆,所述第二夹持组件包括第六驱动模组和沿竖直方向间隔设置的多个第二夹持杆。
19.在一些实施例中,还包括第一升降机构和第二升降机构,所述第一升降机构设于所述第二输送线上,所述第二升降机构设于所述第三输送线上,所述第一升降机构用于升降位于所述第二输送线上的工件,所述第二升降机构用于升降位于所述第三输送线上的工件。
20.在一些实施例中,所述第一升降机构与所述第二升降机构的结构相同,其均包括有第七驱动模组、多个升降杆和升降平台,每一所述升降杆的一端与所述第七驱动模组连接,另一端与所述升降平台连接。
21.在一些实施例中,所述翻板机包括第八驱动模组和翻转平台,所述第八驱动模组用于驱动所述翻转平台翻转180度。
22.本实用新型所提出的数字光刻机,其主要用于pcb线路板制造、半导体生产及高精密细线路曝光,通过数字光刻机将需要的电路图印制到电路板上,从而制备得到所需的pcb板。具体的,本实用新型通过一个曝光机对工件的两面进行曝光,相较于现有的采用两个曝
光机分别对其正反面进行曝光的方式,能够大大减小印刷电路板的全自动双面数字光刻机的整体体积,降低印刷电路板的全自动双面数字光刻机的空间占用及制造成本。
附图说明
23.图1为本实用新型全自动双面数字光刻机的结构示意图;
24.图2为图1所示的全自动双面数字光刻机的俯视图;
25.图3为本实用新型中第一曝光平台、曝光机、第二曝光平台的结构示意图;
26.图4为本实用新型中分板机构和止挡机构的结构示意图;
27.图5为本实用新型中进料移载机构的结构示意图;
28.图6为本实用新型中出料移载机构的结构示意图;
29.图7为本实用新型中定位机构和升降机构的结构示意图;
30.图8为本实用新型中翻板机的结构示意图。
具体实施方式
31.下面详细描述本实用新型的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本实用新型,而不能理解为对本实用新型的限制,基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
32.需要说明,本实用新型实施例中所有方向性指示(诸如上、下、左、右、前、后
……
)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
33.还需要说明的是,当元件被称为“固定于”或“设置于”另一个元件上时,它可以直接在另一个元件上或者可能同时存在居中元件。当一个元件被称为是“连接”另一个元件,它可以是直接连接另一个元件或者可能同时存在居中元件。
34.另外,在本实用新型中涉及“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本实用新型要求的保护范围之内。
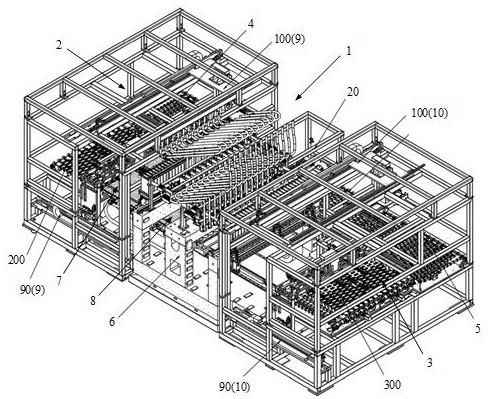
35.请参见图1-3,本实用新型提出一种全自动双面数字光刻机,主要用于 pcb线路板制造、半导体生产及高精密细线路曝光,通过数字光刻机将需要的电路图印制到电路板上,从而制备得到所需的pcb板。本实用新型全自动双面数字光刻机包括第一输送线1、第二输送线2和第三输送线3,第二输送线2和第三输送线3分别位于第一输送线1的两端并与其呈相交设置,第一输送线1的一端设有第一分板机构4,另一端设有第二分板机构5,第一分板机构4用于将位于第一输送线1上的工件转移至第二输送线2上,第二分板机构5用于将位于第一输送线1上的工件转移至第三输送线3上;
36.第二输送线2与第三输送线3之间设有曝光机6,曝光机6的相对两侧设有第一曝光
平台7和第二曝光平台8,第一曝光平台7位于第二输送线2与曝光机6之间,第二曝光平台8位于第三输送线3与曝光机6之间,第一曝光平台7与第二曝光平台8均可移动至曝光机6的下方;
37.第一曝光平台7的上方设有第一机械手9,第二曝光平台8的上方设有第二机械手10,第一机械手9用于将第二输送线2上的工件转移至第一曝光平台7上以及用于将曝光后的工件从第一曝光平台7上转移至第一输送线1上,第二机械手10用于将第三输送线3上的工件转移至第二曝光平台8上以及用于将曝光后的工件从第二曝光平台8上转移至第一输送线1上;
38.第一输送线1上设有翻板机20,翻板机20用于将经第一机械手9转从第一曝光平台7转移至第一输送线1上的工件翻转预设角度。
39.本实施例中,先通过第一分板机构4将位于第一输送线1上的工件转移至第二输送线2上,然后再通过第二输送线2将其输送至第一曝光平台7所在位置处,而后再通过第一机械手9将其从第二输送线2上转移至第一曝光平台7上。第一曝光平台7在装载工件后将移动至曝光机6的下方进行曝光,待曝光完成后再从曝光机6的下方移出并通过第一机械手9将曝光后的工件转移至第一输送线1上。
40.待曝光一面的工件转移至第一输送线1上并移动至翻板机20所在工位后,通过翻板机20将该曝光一面的工件旋转180度,使得未曝光的另一面旋转至上方,而后再输送至第二分板机所在工位,然后通过第二分板机将曝光一面的工件转移至第三输送线3上并将其输送至第二曝光平台8所在位置处。
41.待曝光一面的工件转移至第二曝光平台8所在位置处后,再通过第二机械手10将其转移至第二曝光平台8上,第二曝光平台8在装载工件后将移动至曝光机6的下方,以对曝光一面的工件的另一面进行曝光,待曝光完成后,第二曝光平台8从曝光机6的下方移出并通过第二机械手10将其转移至第一输送线1上,由第一输送线1将其输送至下料工位处。
42.进一步的,第一输送线1、第二输送线2和第三输送线3可采用同步带或转辊等结构实现对于工件的输送,包括但不限于此。其中,第一输送线1的一端可设置上料工位,另一端可设置收料工位。作为优选,本实施例所提出的第一输送线1、第二输送线2和第三输送线3均采用转辊的结构,具体的,第一输送线1、第二输送线2和第三输送线3均包括有支撑架、多个间隔设置在支撑架上的转动杆、多个套设在转动杆上的辊轮以及用于驱动多个支撑杆转动的电机,多个辊轮间隔设置在转动杆上,用于支撑放置于其上的工件。
43.进一步的,第一输送线1的输送方向沿x轴,第二输送线2和第三输送线3的输送线方向沿y轴,由于第二输送线2与第三输送线3的输送方向分别与第一输送线1的输送方向不同,因此需要在第一输送线1的一端设置第一分板机构4,在第一输送线1的另一端设置第二分板机构5,通过第一分板机构4将第一输送线1上的工件转移至第二输送线2上,通过第二分板机构5 将第一输送线1上的工件转移至第三输送线3上。
44.进一步的,第一分板机构4与第二分板机构5可采用机械手的方式,也即在第一输送线1的一端设置一个机械手,用于将第一输送线1上的工件转移至第二输送线2上,在第一输送线1的另一端设置另一个机械手,用于将第一输送线1上的工件转移至第三输送线3上。
45.进一步的,翻板机20也可采用机械手的方式,也即在第一输送线1的一侧设置一个机械手,当曝光一面的工件输送至翻转工位后,通过该机械手将曝光一面的工件抓取并转
动180度,待转动180度后,再将其放置于第一输送线1上,以通过第一输送线1将其继续输送至后序工位,以对该曝光一面的工件的另一面进行曝光。
46.在一些实施例中,请参见图4,本实用新型所提出的第一分板机构4与第二分板机构5的结构相同,其均包括有第一驱动模组30和沿竖直方向间隔设置的多个推杆40,多个推杆40分别与第一驱动模组30传动连接,第一驱动模组30用于驱动多个推杆40沿竖直方向移动,以及用于驱动多个推杆40沿第二输送线2的分布方向移动。
47.本实施例中,第一驱动模组30用于驱动推杆40分别沿z轴和y轴移动,具体的,第一驱动模组30包括z轴直线单元和y轴直线单元,z轴直线单元用于驱动推杆40沿z轴往复移动,y轴直线单元用于驱动推杆40沿y轴往复移动。当第一输送线1上输送有工件时,先通过z轴直线单元驱动推杆40 沿z轴向上移动,而后再通过y轴直线单元驱动推杆40沿y轴靠近第二输送线2的方向移动,在此过程中,推杆40逐渐靠近工件的边缘并与其抵持,而后再推动工件移动,直至工件被转移至第二输送线2上,最后再通过第一驱动模组30带动推杆40复位。其中,第一驱动模组30可采用电机或汽缸等动力源,包括但不限于此,本领域技术人员可根据实际情况进行设计。
48.在一些实施例中,请参见图2、图4,本实用新型所提出的全自动双面数字光刻机还包括设于第一输送线1下方的第一止挡机构50和第二止挡机构60,第一止挡机构50用于将第一输送线1上的工件止挡于第一预设位置,第二止挡机构60用于将第一输送线1上的工件止挡于第二预设位置;其中,工件于第一预设位置,第一分板机构4将工件转移至第二输送线2上,工件于第二预设位置时,第二分板机构5将工件转移至第三输送线3上。
49.本实施例中,在第一输送线1的下方设置有第一止挡机构50和第二止挡机构60,通过第一止挡机构50和第二止挡机构60对工件进行定位,使得工件停留在预设位置处,也即第一预设位置和第二预设位置。具体的,当第一输送线1上输送有工件时,先通过第一止挡机构50使得工件停留在第一预设位置处,而后再通过第一分板机构4将工件转移至第二输送线2上,并通过第二输送线2将其转移至后序工位进行曝光。待曝光完成后,曝光一面的工件将被第一机械手9转移至第一输送线1上并通过翻板机20进行翻转,而后通过第二止挡机构60使得曝光一面的工件停留在第二预设位置处,然后再通过第二分板机构将曝光一面的工件转移至第三输送线3上,并通过第三输送线3将其转移至后序工位上对其另一面进行曝光。
50.在一些实施例中,请参见图4,本实用新型所提出的第一止挡机构50与第二止挡机构60的结构相同,其均包括有第二驱动模组70和沿竖直方向间隔设置的多个挡杆80,第二驱动模组70用于驱动多个挡杆80沿竖直方向移动。
51.本实施例中,第一止挡机构50与第二止挡机构60的结构相同,两者均包括有第二驱动模组70和多个挡杆80,多个挡杆80沿竖直方向间隔分布,当需要对工件进行止挡时,通过第二驱动模组70驱动挡杆80竖直向上移动,不需要时再通过第二驱动模组70驱动挡杆80竖直向下移动以进行复位。其中,第二驱动模组70可采用电机或汽缸等动力源,包括但不限于此,本领域技术人员可根据实际情况进行设计。
52.在一些实施例中,请参见图5、图6,本实用新型所提出的第一机械手9 与第二机械手10结构相同,其均包括有进料移载机构90和出料移载机构100,进料移载机构90包括第三驱动模组91和多个第一吸附组件92,出料移载机构100包括第四驱动模组101和多个第二吸
附组件102;其中,第三驱动模组 91用于驱动多个第一吸附组件92沿竖直方向移动,以及用于驱动多个第一吸附组件92沿第一输送线1的分布方向移动,第四驱动模组101用于驱动多个第二吸附组件102沿竖直方向移动,以及用于驱动多个第二吸附组件102沿第二输送线2的分布方向移动。
53.本实施例中,第一机械手9与第二机械手10的结构相同,两者都包括有进料移载机构90和出料移载机构100,进料移载机构90用于将第二输送线2 上的工件转移至第一曝光平台7上,以及用于将第三输送线3上的工件转移至第二曝光平台8上,出料移载机构100用于将第一曝光平台7上的工件转移至第一输送线1上,以及用于将第二曝光平台8上的工件转移至第一输送线1上。
54.进一步的,进料移载机构90包括有第三驱动模组91和多个第一吸附组件92,出料移载机构100包括有第四驱动模组101和多个第二吸附组件102,第三驱动模组91包括一个z轴直线单元和一个x轴直线单元,z轴直线单元用于驱动第一吸附组件92沿竖直方向上下移动,x轴直线单元用于驱动第一吸附组件92沿第一输送线1的分布方向移动。第四驱动模组101包括一个z 轴直线单元和一个y轴直线单元,y轴直线单元用于驱动第二吸附组件102 沿第二输送线2的分布方向移动。
55.在一些实施例中,请参见图2、图7,本实用新型所提出的全自动双面数字光刻机还包括第一定位机构200和第二定位机构300,第一定位机构200设于第二输送线2上,第二定位机构300设于第三输送线3上,第一定位机构 200用于对位于第二输送线2上的工件进行定位,第二定位机构300用于对位于第三输送线3上的工件进行定位。
56.本实施例中,工件在从第二输送线2转移至第一曝光平台7以及从第三输送线3转移至第二曝光平台8之前,需要先对工件进行定位,使得工件位于预设区域内,比如使得工件位于中间位置。为此,本实施例在第二输送线2 和第三输送线3上分别设置有第一定位机构200和第二定位机构300,当工件经由第二输送线2或经由第三输送线3输送至第一曝光平台7或第二曝光平台8所在位置处后,先通过第一定位机构200或第二定位机构300对工件进行定位,待定位完成后,再经由第一机械手9或第二机械手10将其转移。
57.在一些实施例中,请参见图7,本实用新型所提出的第一定位机构200与第二定位机构300的结构相同,其均包括有两间隔设置的第一夹持组件400 和第二夹持组件500,第一夹持组件400包括第五驱动模组401和沿竖直方向间隔设置的多个第一夹持杆402,第二夹持组件500包括第六驱动模组501和沿竖直方向间隔设置的多个第二夹持杆。
58.本实施例中,第一定位机构200与第二定位机构300的结构相同,两者均包括有两个相对设置的第一夹持组件400和第二夹持组件500,第一夹持组件400与第二夹持组件500可相向或背向移动,当第一夹持组件400与第二夹持组件500相向移动时,第一夹持组件400与第二夹持组件500逐渐靠近工件的相对两侧并对其进行夹持,在夹持过程中,可使得工件处于预设区域内,当第一夹持组件400与第二夹持组件500背向移动时,第一夹持组件400 与第二夹持组件500逐渐远离工件的相对两侧,以使得第一夹持组件400和第二夹持组件500进行复位。
59.进一步的,第一夹持组件400包括第五驱动模组401和多个第一夹持杆 402,第二夹持组件500包括第六驱动模组501和多个第二夹持杆502,第五驱动模组401用于驱动第一夹持杆402沿x轴方向移动,第六驱动模组501 用于驱动第二夹持杆502沿x轴方向移动。其
中,第五驱动模组401和第六驱动模组501均可采用电机或汽缸驱动,包括但不限于此。
60.在一些实施例中,请参见图2,本实用新型所提出的全自动双面数字光刻机还包括第一升降机构600和第二升降机构700,第一升降机构600设于第二输送线2上,第二升降机构700设于第三输送线3上,第一升降机构600用于升降位于第二输送线2上的工件,第二升降机构700用于升降位于第三输送线3上的工件。
61.本实施例中,在对工件进行定位时,由于是通过第一夹持杆402和第二夹持杆502夹持夹持工件并使得其在第二输送线2或第三输送线3上移动,因此,工件在移动过程中会与输送线的辊轮发生摩擦,而辊轮与工件之间为点对面的摩擦,因此会对工件造成一定的损伤。为此,本实施例在第二输送线2和第三输送线30上分别设置有第一升降机构600和第二升降机构700,当需要对第二输送线2上的工件进行定位时,先通过第一升降机构600驱动工件沿z轴向上移动,而后再通过第一夹持组件400和第二夹持组件500相向移动,以使得工件位于预设区域,当需要对第三输送线3上的工件进行定位时,原理同上所述,在此不再赘述。
62.在一些实施例中,请参见图7,本实用新型所提出的第一升降机构600与第二升降机构700的结构相同,其均包括有第七驱动模组800、多个升降杆 900和升降平台(图未示),每一升降杆的一端与第七驱动模组800连接,另一端与升降平台连接。
63.本实施例中,第一升降机构600与第二升降机构700的结构相同,其均包括有第七驱动模组800、多个升降杆900和升降平台,升降平台用于承载工件,升降杆900的一端与第七驱动模组800连接,另一端与升降平台连接。具体的,第七驱动模组800可驱动升降杆900沿竖直方向往复移动,从而带动升降平台沿竖直方向往复移动,进而可带动工件沿竖直方向往复移动,使得工件能够脱离第二输送线2或第三输送线3。
64.在一些实施例中,请参见图8,本实用新型所提出的翻板机20包括第八驱动模组201和翻转平台202,第八驱动模组201用于驱动翻转平台202翻转 180度。
65.本实施例中,翻板机20包括第八驱动模组201和翻转平台202,翻转平台202上设置有用于固定工件的固定结构,使得工件在翻转时不会从翻转平台上掉落。其中,第八驱动模组201用于驱动翻转平台202转动180度,使得工件的另一面转动至上方,而后再通过曝光机6对工件的另一面进行曝光,从而实现单个曝光机6对工件的两面进行曝光。
66.以上的仅为本实用新型的部分或优选实施例,无论是文字还是附图都不能因此限制本实用新型保护的范围,凡是在与本实用新型一个整体的构思下,利用本实用新型说明书及附图内容所作的等效结构变换,或直接/间接运用在其他相关的技术领域均包括在本实用新型保护的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。