1.本实用新型涉及机械领域,尤其涉及钢网片抓取领域,具体是指一种实现钢网片抓取的机械手装置。
背景技术:
2.随着全自动生产水泥复合板的的兴起和发展,钢网片的生产和使用量大大增加,传统半自动化的作业模式已无法满足市场对于产品产量的要求,全自动的加工运输必成为未来的发展方向。传统半自动设备钢网片的抓取多为人工作业,主要缺点有以下几点:(1)人工劳动强度大,劳动环境差;(2)工作效率无法满足现场生产的需求;(3)只能轻量化作业,大型钢网片抓取困难;(4)对工人的人身安全具有一定威胁。
技术实现要素:
3.本实用新型的目的是克服了上述现有技术的缺点,提供了一种满足同一性好、缓冲性好、适用范围较为广泛的实现钢网片抓取的机械手装置。
4.为了实现上述目的,本实用新型的实现钢网片抓取的机械手装置如下:
5.该实现钢网片抓取的机械手装置,其主要特点是,所述的装置包括机械手主梁、压紧支架、检测模具车组件、单磁吸取组件、双磁吸取组件和探测组件,所述的机械手主梁包括与机器人相连接的法兰板和铝型材,所述的装置具有多个压紧支架、单磁吸取组件、双磁吸取组件和探测组件,所述的压紧支架均设于机械手主梁下方,所述的检测模具车组件置于机械手主梁下方,所述的单磁吸取组件均设于机械手主梁的下方且单磁吸取组件设于相邻的两个压紧支架之间,所述的双磁吸取组件均设于机械手主梁的下方,所述的单磁吸取组件和双磁吸取组件均吸附钢网片,所述的探测组件固定于相邻的两个单磁吸取组件上。
6.较佳地,所述的检测模具车组件包括传感器安装支架、保护罩和传感器,所述的传感器安装支架和保护罩固定在机械手主梁的铝型材上,其中传感器和传感器安装支架在保护罩内部。
7.较佳地,所述的单磁吸取组件包括气缸安装板、气缸、磁铁安装板和永磁铁,所述的气缸安装板固定在机械手主梁的铝型材上,所述的气缸固定在气缸安装板上,所述的磁铁安装板一面固定在气缸的推板上,另一面固定在永磁铁上。
8.较佳地,所述的双磁吸取组件包括气缸安装板、气缸、磁铁安装板和两件永磁铁,所述气缸安装板固定在机械手主梁的铝型材上,所述的气缸固定在气缸安装板上,所述的磁铁安装板的一面固定在气缸的推板上,另一面通过螺栓分别固定两块永磁铁。
9.较佳地,所述的探测组件包括安装支架、探杆安装板、探杆、挡块、探片、接近开关、弹簧和无油衬套,所述的安装支架固定在气缸提升组件中吸盘气缸安装座的背面,所述的探杆安装板固定在安装支架上,所述的接近开关安装在探杆安装板的槽口中,所述的无油衬套固定在安装支架上;所述的挡块固定在无油衬套上,所述的探杆通过轴孔配合安装在无油衬套中,并与挡块同心轴;所述的探片固定在探杆末端,所述的弹簧固定在探片和无油
衬套之间,并与安装在探杆外侧。
10.较佳地,所述的双磁吸取组件的磁力大于单磁吸取组件的磁力。
11.采用了本实用新型的实现钢网片抓取的机械手装置,采用了该实现钢网片抓取的机械手装置,可实现全自动抓取放置钢网片、抓取多种规格不同重量的钢网片等工艺处理。本实用新型比较于传统人工操作方式,整个工艺过程节拍快速稳定,产品效率高。本实用新型装置采用永磁铁进行钢网片进行抓取作业,相比传统的抓取方式更加稳定,且对钢网片的损伤较小。本实用新型采用了单磁铁抓取与双磁铁抓取方式相结合,保证了钢网片抓取过程中的稳定性,且可以抓取更多重量的、更多规格的钢网片。
附图说明
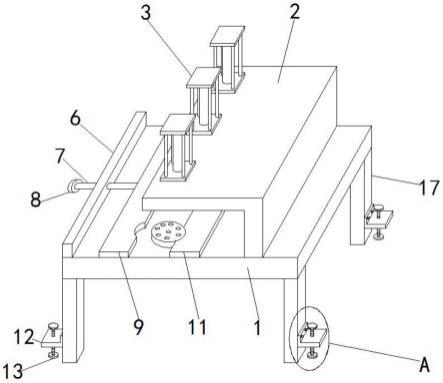
12.图1为本实用新型的实现钢网片抓取的机械手装置的结构示意图。
13.图2为本实用新型的实现钢网片抓取的机械手装置的检测模具车组件轴侧示意图。
14.图3为本实用新型的实现钢网片抓取的机械手装置的单磁吸取组件轴侧示意图。
15.图4为本实用新型的实现钢网片抓取的机械手装置的双磁吸取组件轴侧示意图。
16.图5为本实用新型的实现钢网片抓取的机械手装置的探测组件轴侧示意图。
17.附图标记:
[0018]1ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
机械手主梁
[0019]2ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
压紧支架
[0020]3ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
检测模具车组件
[0021]
301
ꢀꢀꢀꢀꢀꢀꢀ
传感器安装支架
[0022]
302
ꢀꢀꢀꢀꢀꢀꢀ
保护罩
[0023]
303
ꢀꢀꢀꢀꢀꢀꢀ
传感器
[0024]4ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
单磁吸取组件
[0025]
401
ꢀꢀꢀꢀꢀꢀꢀ
气缸安装板
[0026]
402
ꢀꢀꢀꢀꢀꢀꢀ
气缸
[0027]
403
ꢀꢀꢀꢀꢀꢀꢀ
磁铁安装板
[0028]
404
ꢀꢀꢀꢀꢀꢀꢀ
永磁铁
[0029]5ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
双磁吸取组件
[0030]
501
ꢀꢀꢀꢀꢀꢀꢀ
气缸安装板
[0031]
502
ꢀꢀꢀꢀꢀꢀꢀ
气缸
[0032]
503
ꢀꢀꢀꢀꢀꢀꢀ
磁铁安装板
[0033]
504
ꢀꢀꢀꢀꢀꢀꢀ
永磁铁
[0034]6ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
探测组件
[0035]
601
ꢀꢀꢀꢀꢀꢀꢀ
安装支架
[0036]
602
ꢀꢀꢀꢀꢀꢀꢀ
探杆安装板
[0037]
603
ꢀꢀꢀꢀꢀꢀꢀ
探杆
[0038]
604
ꢀꢀꢀꢀꢀꢀꢀ
挡块
[0039]
605
ꢀꢀꢀꢀꢀꢀꢀ
探片
具体实施方式
[0040]
为了能够更清楚地描述本实用新型的技术内容,下面结合具体实施例来进行进一步的描述。
[0041]
本实用新型的该实现钢网片抓取的机械手装置,其中包括磁吸取组件4设于相邻的两个压紧支架2之间,所述的双磁吸取组件5均设于机械手主梁1的下方,所述的单磁吸取组件4和双磁吸取组件5均吸附钢网片,所述的探测组件6固定于相邻的两个单磁吸取组件4上。
[0042]
所述的检测模具车组件3包括传感器安装支架301、保护罩302和传感器303,所述的传感器安装支架301和保护罩302固定在机械手主梁1的铝型材上,其中传感器303和传感器安装支架301在保护罩302内部。
[0043]
吸取组件4包括气缸安装板401、气缸402、磁铁安装板403和永磁铁404,所述的气缸安装板401固定在机械手主梁1的铝型材上,所述的气缸402固定在气缸安装板401上,所述的磁铁安装板403一面固定在气缸402的推板上,另一面固定在永磁铁404上。
[0044]
所述的双磁吸取组件5包括气缸安装板501、气缸502、磁铁安装板503和两件永磁铁504,所述气缸安装板501固定在机械手主梁1的铝型材上,所述的气缸502固定在气缸安装板501上,所述的磁铁安装板503的一面固定在气缸502的推板上,另一面通过螺栓分别固定两块永磁铁504。
[0045]
较佳地,所述的探测组件6包括安装支架601、探杆安装板602、探杆603、挡块604、探片605、接近开关606、弹簧607和无油衬套608,所述的安装支架601固定在气缸提升组件4中吸盘气缸安装座402的背面,所述的探杆安装板602固定在安装支架601上,所述的接近开关606安装在探杆安装板602的槽口中,所述的无油衬套打低分608固定在安装支架601上;所述的挡块604固定在无油衬套608上,所述的探杆603通过轴孔配合安装在无油衬套608中,并与挡块604同心轴;所述的探片605固定在探杆603末端,所述的弹簧607固定在探片605和无油衬套608之间,并与安装在探杆603外侧。
[0046]
较佳地,所述的在竖直方向的磁铁安装板503的下表面与永磁铁504的上表面的距离约为65mm。
[0047]
较佳地,所述的双磁吸取组件5的磁力大于单磁吸取组件4的磁力。
[0048]
该利用于钢网片抓取的机械手装置及方法,其主要特点是,所述的方法包括以下步骤:
[0049]
一、抓取小规格轻量级的钢网片
[0050]
(1)将装置调整至初始位置,初始位置探测组件6的探片605在竖直方向比永磁铁404要低;装置随机器人运动至钢网片的上方的设定位置,气缸402、气缸502均处于缩回状态,弹簧607处于原始放松状态,整个过程中双磁吸取组件5不工作;
[0051]
(2)气缸402向外伸出一小段距离,使得固定在单磁吸取组件4上的探测组件6中的探片605底面在竖直方向上的位置要比压紧支架2的最低面还要低3-5mm。
[0052]
(3)机器人带动机械手向下移动,通过探测组件6检测到钢网片的位置,进行抓取准备;探片605接触到钢网片后,弹簧607处于压缩状态,使得探杆603向上运动,同时顶住挡块604向上运动一定距离;因此被接近开关606捕捉到信号,表明已经检测到钢网片位置,可以开始抓取;
[0053]
(4)通过单磁吸取组件4抓取钢网片,四组单磁吸取组件4中的气缸402伸长,使得永磁铁404接触到钢网片,从而起到抓取作用;
[0054]
(5)机械手抓取钢网片进行旋转,放置准备;
[0055]
(6)若模具车始终停在固定位置,则直接放置钢网片;若模具车没有停在固定位置,则通过检测模具车组件3定位模具车的位置,再进行放置;
[0056]
(7)钢网片放置,单磁吸取组件4中的气缸402缩回运动,使得永磁铁404逐渐脱离与钢网片的接触,此时钢网片被压紧支架2所阻挡,从而此过程中的磁力小于钢网片自身的重力,达到放置的作用;
[0057]
(8)装置恢复至初始位置,继续步骤(1)处理下个产品。
[0058]
二、抓取大规格重量级的钢网片
[0059]
(1)将装置调整至初始位置,初始位置探测组件6的探片605在竖直方向比永磁铁404要低;装置随机器人运动至钢网片的上方的设定位置,气缸402、气缸502均处于缩回状态,弹簧607处于原始放松状态;
[0060]
(2)气缸402向外伸出一小段距离,使得固定在单磁吸取组件4上的探测组件6中的探片605底面在竖直方向上的位置要比压紧支架2的最低面还要低3-5mm。
[0061]
(3)机器人带动机械手向下移动,通过探测组件6检测到钢网片的位置,进行抓取准备;探片605接触到钢网片后,弹簧607处于压缩状态,使得探杆603向上运动,同时顶住挡块604向上运动一定距离;因此被接近开关606捕捉到信号,表明已经检测到钢网片位置,可以开始抓取;
[0062]
(4)通过单磁吸取组件4和双磁吸取组件5同时抓取钢网片,四组单磁吸取组件4中的气缸402伸长,四组双磁吸取组件5中的气缸502伸长,使得永磁铁404和永磁铁504同时接触到钢网片,从而起到抓取作用;
[0063]
(5)机械手抓取钢网片进行旋转,放置准备;
[0064]
(6)若模具车始终停在固定位置,则直接放置钢网片;若模具车没有停在固定位置,则通过检测模具车组件3定位模具车的位置,再进行放置;
[0065]
(7)钢网片放置,单磁吸取组件4中的气缸402缩回运动以及双磁吸取组件5中的气缸502缩回运动,使得永磁铁404与永磁铁504逐渐脱离与钢网片的接触,此时钢网片被压紧支架2所阻挡,从而此过程中的磁力小于钢网片自身的重力,达到放置的作用;
[0066]
(8)装置恢复至初始位置,继续步骤(1)处理下个产品。
[0067]
本实用新型的具体实施方式中,克服了现有技术的缺点,提供了一种可实现全自动抓取放置钢网片、抓取多种规格不同重量的钢网片等工艺处理。
[0068]
如图1所示,本实用新型的装置包括:
[0069]
机械手主梁1,用于与机器人连接,承重钢网片的作用。
[0070]
压紧支架2,用来压紧钢网片,以及当需要放置钢网片、永磁铁回退时作为阻挡,起到辅助放置的作用。
[0071]
检测模具车组件3,用于模具车不在固定位置的情况,定位模具车的位置。
[0072]
单磁吸取组件4,用于抓取小规格轻量级的钢网片,和辅助抓取大规格重量级的钢网片。
[0073]
双磁吸取组件5,用于抓取大规格重量级的钢网片。
[0074]
探测组件6,用于抓取前探测钢网片的位置,为抓取做准备。
[0075]
本实用新型的基于上述装置实现钢网片抓取的机械手方法,其中,包括以下步骤:
[0076]
(1)初始位置。装置随机器人运动至钢网片的上方的设定位置,探测组件6的探片605在竖直方向比永磁铁404要低;装置随机器人运动至钢网片的上方的设定位置,气缸402、气缸502均处于缩回状态,弹簧607处于原始放松状态;
[0077]
(2)探测准备。气缸402向外伸出一小段距离,使得固定在单磁吸取组件4上的探测组件6中的探片605底面在竖直方向上的位置要比压紧支架2的最低面还要低3-5mm。
[0078]
(3)抓取准备。探测组件6检测到钢网片的位置,进行抓取准备;探片605接触到钢网片后,弹簧607处于压缩状态,使得探杆603向上运动,同时顶住挡块604向上运动一定距离;因次被接近开关606捕捉到信号,表明已经检测到钢网片位置,可以开始抓取。
[0079]
(4)抓取作业。小规格轻量级钢网片抓取作业,通过单磁吸取组件4抓取钢网片,四组单磁吸取组件4中的气缸402伸长,使得永磁铁404接触到钢网片,从而起到抓取作用;大规格重量级钢网片抓取作业,通过单磁吸取组件4和双磁吸取组件5同时抓取钢网片,四组单磁吸取组件4中的气缸402伸长,四组双磁吸取组件5中的气缸502伸长,使得永磁铁404和永磁铁504同时接触到钢网片,从而起到抓取作用;
[0080]
(5)放置作业。若模具车始终停在固定位置,则直接放置钢网片;若模具车没有停在固定位置,则通过检测模具车组件3定位模具车的位置,再进行放置。小规格轻量级钢网片放置作业,单磁吸取组件4中的气缸402缩回运动,使得永磁铁404逐渐脱离与钢网片的接触,此时钢网片被压紧支架2所阻挡,从而此时的磁力小于钢网片自身的重力,达到放置的作用;大规格重量级钢网片放置作业,单磁吸取组件4中的气缸402缩回运动以及双磁吸取组件5中的气缸502缩回运动,使得永磁铁404与永磁铁504逐渐脱离与钢网片的接触,此时钢网片被压紧支架2所阻挡,从而此时的磁力小于钢网片自身的重力,达到放置的作用;
[0081]
(6)复位、重复循环。所有机构恢复至初始位置,随后对下一个产品进行同样的操作,如此循环作业。
[0082]
采用了本实用新型的实现钢网片抓取的机械手装置,可实现全自动抓取放置钢网片、抓取多种规格不同重量的钢网片等工艺处理。本实用新型比较于传统人工操作方式,整个工艺过程节拍快速稳定,产品效率高。本实用新型装置采用永磁铁进行钢网片进行抓取作业,相比传统的抓取方式更加稳定,且对钢网片的损伤较小。本方案发生采用了单磁铁抓取与双磁铁抓取方式相结合,保证了钢网片抓取过程中的稳定性,且可以抓取更多重量的、更多规格的钢网片。
[0083]
在此说明书中,本实用新型已参照其特定的实施例作了描述。但是,很显然仍可以作出各种修改和变换而不背离本实用新型的精神和范围。因此,说明书和附图应被认为是说明性的而非限制性的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。