1.本发明涉及讲解机器人技术领域,具体为一种讲解机器人。
背景技术:
2.机器人是自动执行工作的机器装置。它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。它的任务是协助或取代人类工作的工作,例如生产业、建筑业,或是危险的工作。
3.现有的展馆在展示物品或讲解时,由于展馆展示物品信息的专业性和前沿性,很多参观者无法了解展览物品的信息和意义,从而无法达到展览的目的,传统的人员讲解成本高,而录音播放讲解内容重复播放,无法根据参观者的实际需求进行讲解,参观者被动接受讲解知识,无法达到相应的展览目的,同时讲解效率较低。
技术实现要素:
4.本发明的目的在于提供一种讲解机器人,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:一种讲解机器人,包括外壳组件、支撑组件及触摸屏;所述外壳组件包括机器人骨架,所述机器人骨架前后端分别设有与之连接的前壳与后壳,所述前壳与后壳下端分别设有与之连接的下前壳与下后壳,所述前壳与所述下前壳远离所述机器人骨架的一侧依次设有触摸屏、启动按钮与超声波,所述后壳与下后壳远离所述机器人骨架的另一侧依次设有急停按钮、充电引导电路板、灯罩、充电红外条、手动充电口与电极;所述支撑组件包括设置于所述机器人骨架下端的上板,所述上板下端设有底盘,所述上板与所述底盘之间设有至少四根相连接的支柱,所述上板与所述底盘之间设有路由器、算法板、imu、锂电池、主控板、安卓板与功放板,所述机器人骨架靠近所述上板的一侧还设有电源板固定板,其上端固定设置有电源板,所述底盘下端设有移动机构;优选的,所述前壳下端与所述下前壳上部设置的插孔匹配插装,所述后壳下端与所述下后壳上部设置的插孔匹配插装,且所述前壳、后壳、下前壳、下后壳分别通过多颗螺钉与所述机器人骨架固定连接。
6.优选的,所述超声波设置于所述下前壳一侧,所述下后壳一侧还分别设有电极固定板与充电引导电路板支架,且所述电极与所述充电引导电路板分别与之固定连接,优选的,所述充电红外条与所述灯罩均通过卡扣与所述下后壳卡接连接。
7.优选的,所述电源板固定板背面设有与所述机器人骨架固定设置的电源模块固定板,其上端设有电源模块,所述路由器、算法板与imu分别与路由器固定板、算法板固定板固定连接,所述路由器固定板与其中两根所述支柱固定连接。
8.优选的,所述锂电池与设置于所述底盘上的电池支架固定安装,所述主控板与电路板固定板固定设置,所述安卓板与功放板均与所述机器人骨架固定连接,所述电路板固
定板与所述算法板固定板固定连接。
9.优选的,所述锂电池上端还设有与其中两根所述支柱固定连接的电池固定板,所述上板一侧设有与之固定连接的激光雷达。
10.优选的,所述移动机构包括设置于所述底盘中部两侧的驱动轮组件与设置于其下端的多个万向轮。
11.优选的,所述触摸屏包括与所述前壳固定连接的屏幕后壳,所述屏幕后壳远离所述前壳的一侧依次设有语音板、第一屏幕固定支架、第二屏幕固定支架、触摸屏、摄像头及屏幕前壳,所述屏幕后壳顶部还设有咪头及咪头安装板。
12.有益效果本发明所提供的讲解机器人,通过手机或电脑连接精灵机器人wifi构建地图,通过电脑或手机控制机器人行走,机器人通过激光雷达扫描周边环境,进行使用场景地图的构建,通过触摸屏在使用场景中设置充电点\迎宾点\讲解点,从而已达到更好的服务,当机器人电量过低时,机器人可自动规划路径回到设置好的充电点进行充电。
附图说明
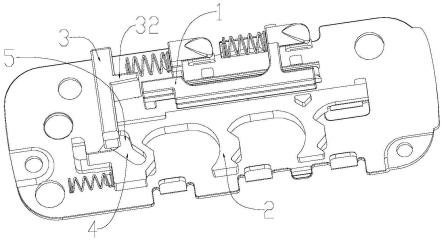
13.图1为本发明的整体结构示意图;图2为本发明的整体结构侧视示意图;图3为本发明的外壳组件爆炸示意图;图4为本发明的支撑组件爆炸示意图;图5为本发明的触摸屏爆炸示意图。
具体实施方式
14.以下是本发明的具体实施例并结合附图,对本发明的技术方案作进一步的描述,但本发明并不限于这些实施例。
实施例
15.如图1-3所示,一种讲解机器人,包括外壳组件、支撑组件及触摸屏4;外壳组件包括机器人骨架6,机器人骨架6前后端分别设有与之连接的前壳5与后壳7,前壳5与后壳7下端分别设有与之连接的下前壳2与下后壳14,前壳5与下前壳2远离机器人骨架6的一侧依次设有触摸屏4、启动按钮3与超声波1,后壳7与下后壳14远离机器人骨架6的另一侧依次设有急停按钮8、充电引导电路板9、灯罩11、充电红外条12、手动充电口15与电极16;支撑组件包括设置于机器人骨架6下端的上板17,上板17下端设有底盘18,上板17与底盘18之间设有至少四根相连接的支柱19,上板17与底盘18之间设有路由器20、算法板21、imu22、锂电池23、主控板24、安卓板25与功放板26,机器人骨架6靠近上板17的一侧还设有电源板固定板27,其上端固定设置有电源板28,底盘18下端设有移动机构;本实施例中,前壳5下端与下前壳2上部设置的插孔匹配插装,后壳7下端与下后壳14上部设置的插孔匹配插装,且前壳5、后壳7、下前壳2、下后壳14分别通过多颗螺钉与机器人骨架6固定连接,其中,超声波1设置于下前壳2一侧,超声波可进行场景的扫描,并上传至
手机或电脑中,下后壳14一侧还分别设有电极固定板13与充电引导电路板支架10,且电极16与充电引导电路板9分别与之固定连接,充电引导电路板可识别充电点,并反馈给主控板,从而使机器人自动移动至充电点进行充电,充电红外条12与灯罩11均通过卡扣与下后壳14卡接连接。
16.电源板固定板27背面设有与机器人骨架6固定设置的电源模块固定板29,其上端设有电源模块30,路由器20、算法板21与imu22分别与路由器固定板31、算法板固定板32固定连接,路由器固定板31与其中两根支柱19固定连接,锂电池23与设置于底盘18上的电池支架33固定安装,主控板24与电路板固定板34固定设置,安卓板25与功放板26均与机器人骨架6固定连接,电路板固定板34与算法板固定板32固定连接。
17.锂电池23上端还设有与其中两根支柱19固定连接的电池固定板35,上板17一侧设有与之固定连接的激光雷达36,移动机构包括设置于底盘18中部两侧的驱动轮组件37与设置于其下端的多个万向轮38,驱动轮组件37内包括了轮毂电机及缓冲结构。
18.触摸屏包括与前壳5固定连接的屏幕后壳39,屏幕后壳39远离前壳5的一侧依次设有语音板40、第一屏幕固定支架41、第二屏幕固定支架42、触摸屏43、摄像头44及屏幕前壳45,屏幕后壳39顶部还设有咪头46及咪头安装板47。
19.将机器人开关按钮打开,用手机或电脑连接精灵机器人wifi后打开地图构建app,通过电脑或手机控制机器人行走,机器人使用激光雷达扫描周边环境,进行使用场景地图的构建。
20.地图构建完成后,通过触摸屏在使用场景中设置充电点\迎宾点\讲解点。
21.当有人到达设置迎宾点\讲解点时,机器人可通过摄像头识别人员到来,并主动向所来人员问候\或讲解介绍相关内容。
22.机器人还可通过头顶六麦拾取声音与所来人员进行交流,机器人顶部的六麦不仅可以拾取声音,还可以根据声源的位置来确定说话人员的位置,从而已达到更好的服务。
23.机器人超声波可在行走过程中判断行走路径上的障碍物,从而避免与障碍物发生碰撞,当电量过低时,机器人会自动规划路径回到设置好的充电点进行充电。
24.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明性的保护范围之内的发明内容。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。