包括制动命令的动态校正的飞行器制动方法
1.本发明涉及包括制动命令的动态校正的飞行器制动方法的领域。
2.发明背景
3.现代飞行器,例如飞机或直升机,常规地具有飞行器的某些所谓“制动”轮的地面制动系统。制动系统包括一个或多个制动计算机,这些计算机对制动轮之一进行装备。
4.每个制动器包括例如由钢或碳制成的至少一个摩擦构件,以及一个或多个制动致动器,它们是液压致动器(因此称为“液压制动系统”)或机电致动器(因此称为“电制动系统”)。
5.在飞机的情况下,每个制动器通常包括若干致动器和碳盘堆。
6.在直升机的情况下,专利fr 3007096b1描述了一种制动器,其中单个盘与制动轮一起旋转,盘与卡钳相关联,卡钳与盘交叠并且卡钳的钳口接收两个垫片,其中一个垫片可移动安装以能够借助于单个制动致动器将盘夹在两个垫片之间。
7.当飞行器的驾驶员踩下位于驾驶舱内的制动踏板时,产生所谓的手动制动设定点,该设定点取决于赋予制动踏板的偏转按压。该手动制动设定点被传送给制动计算机,该计算机基于手动制动设定点来生成手动制动命令。同样,当制动由自动制动功能命令时,自动制动设定点被传送给制动计算机,该计算机生成自动制动命令。
8.手动或自动制动命令被用于控制制动致动器,结果是每个制动器作用在相关联的制动轮上,制动扭矩制动制动轮,并且因此使飞行器减速。
9.发明目的
10.本发明的目的是优化制动命令,其目的是限制损坏制动器的结构的风险,同时保持整体预期制动性能。
发明概要
11.鉴于实现这一目标,提出了一种用于制动飞行器的至少一个机轮的方法,该机轮设置有具有至少一个制动致动器的制动器,该方法包括以下步骤:
12.基于制动设定点来生成制动命令;
13.估计和/或测量机轮速度;
14.对制动命令应用动态校正,该动态校正是制动命令和机轮速度的函数,动态校正包括在机轮速度大于或等于预定速度阈值时产生大于制动命令的经校正制动命令的步骤,以及随后当机轮速度变得小于预定速度阈值时,减小经校正制动命令的步骤,其结果是经校正制动命令变得小于制动命令;
15.通过使用经校正制动命令控制机轮的制动器的制动致动器。
16.基于大量制动测试的结果进行的广泛分析使得可能的是,观察在制动期间,当使用恒定的制动命令时,制动器实际施加在机轮上的制动扭矩水平与机轮速度直接相关。制动器实际施加在机轮上的制动扭矩在低速时较大,并且在高速时较小。
17.因此,在高速下,现有技术的制动方法的性能不是最佳的,并且在低速下,存在损坏制动装备的风险。
18.相反,在根据本发明的制动方法中,应用了取决于制动命令和机轮速度的动态校正。动态校正使得以下成为可能:补偿高速时的制动命令,并且从而改善制动性能,并且限制低速时的制动命令,并且从而延长飞行器的制动器的使用寿命,以及降低损坏制动器的结构(尤其是转子结构)的风险。
19.另外,还提出了一种制动方法,诸如刚刚描述的制动方法,其中动态校正包括将制动命令乘以取决于制动命令和机轮速度的校正系数。
20.另外,提出了一种制动方法,例如刚刚描述的制动方法,其中对于给定制动命令,当机轮速度大于或等于预定速度阈值时,校正系数具有仅取决于给定制动命令的恒定值。
21.此外,提出了一种制动方法,诸如刚刚描述的制动方法,其中恒定值是制动命令的递增函数。
22.另外,提出了一种制动方法,诸如刚刚描述的制动方法,其中校正系数由最小校正系数和最大校正系数来限制。
23.另外,还提出了一种制动方法,诸如刚刚描述的制动方法,其中对于给定制动命令,当机轮速度小于预定速度阈值时,校正系数是机轮速度的递增线性函数。
24.另外,提出了一种制动方法,诸如刚刚描述的制动方法,其中线性函数的斜率是制动命令的递增函数。
25.此外,还提出了一种制动方法,诸如刚刚描述的制动方法,其中在零轮速下的校正系数的值是制动命令的递减函数。另外,还提出了一种制动方法,诸如刚刚描述的制动方法,其中无论制动命令如何,线性函数都会经过一个由预定义机轮值和预定义系数值定义的相同点。
26.另外,提出了一种制动方法,诸如刚刚描述的制动方法,其中预定义系数值等于1。
27.根据以下对本发明的特定非限制性实施例的描述,将最好地理解本发明。
28.附图的简要说明
29.将对附图作出参考,附图中:
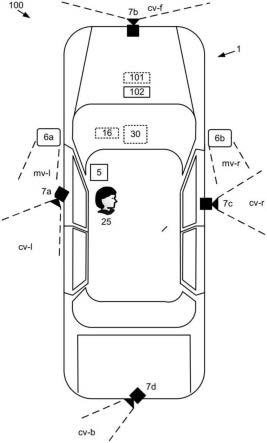
30.图1是包括作为时间函数的制动扭矩曲线的示图;
31.图2是包括作为机轮速度函数的制动扭矩曲线的示图;
32.图3表示其中实现根据本发明的制动方法的电制动系统;
33.图4表示根据本发明的制动方法的各步骤;
34.图5表示限制/补偿功能单元;
35.图6是包括作为机轮速度函数的校正系数的曲线的示图。
36.本发明的详细描述
37.在为直升机开发新型电制动系统的范围中,已经进行了大量的制动测试,并且尤其是对这些测试的结果进行了广泛的分析。
38.参考图1,这些分析使得以下成为可能:观察到在制动期间,当使用恒定制动力命令(手动或自动)来控制机轮的制动器的制动致动器时,制动器实际施加的制动扭矩c
freinage
在制动期间增加。
39.参考图2,这些分析还使得以下成为可能:表明实际施加的制动扭矩c
freinage
与机轮速度直接相关。制动器实际施加在机轮上的制动扭矩在低速时较大,并且在高速时较低。制动扭矩的这种演进传递了制动效率系数“μ”随速度的变化。
40.在用恒定制动力命令制动期间,制动扭矩的变化不是最优的。事实上,在高速下,观察到的平均制动扭矩是恒定的,但远离最大容许制动扭矩。更大的制动力将使得以下成为可能:使用剩余裕度并提高制动性能。在低速下,当机轮转速降低时,平均制动扭矩增加,并可能变得大于最大允许制动扭矩。这种情况有导致制动器的结构组件断裂的风险。制动力命令越大,风险增加得就越多。
41.参考图3,这里在直升机的电制动系统1中实现本发明,其目的是优化制动扭矩,以降低损坏制动器结构的风险并保持所需的性能水平。
42.直升机包括两个前轮和两个主轮。两个主轮是制动轮2。
43.电制动系统1包括两个制动器3,每个制动器与一个机轮2相关联。
44.每个制动器3包括作为机电致动器的制动致动器,以及盘、卡钳和垫片。制动致动器作用在可移动垫片上,以将盘夹在两个垫片之间。
45.因此,每个制动器3产生制动扭矩,以制动相关联机轮2。
46.制动器可由位于直升机的驾驶舱中制动踏板4来命令。每个制动踏板4连接到按压传感器5,该按压传感器测量相关联制动踏板4的偏转。
47.电制动系统1另外包括制动计算机6,该制动计算机连接至按压传感器5。
48.现在,参考图4和图5更详细地描述根据本发明的制动方法。
49.当直升机驾驶员踩下制动踏板4以制动直升机时,相关联的按压传感器5测量制动踏板4的偏转并且因此产生制动设定点cf。
50.制动计算机6获取制动设定点cf,并基于该制动设定点cf来生成针对机轮2的制动器3的初步制动命令c
pr
é
l
。初步制动命令c
pr
é
l
在这里是力命令。
51.如图4中所见,根据第一预定曲线7,初步制动命令c
pr
é
l
取决于制动设定点cf(并且因此取决于偏转的测量)。
52.制动计算机6对初步制动命令c
pr
é
l
执行处理。该处理具有多个功能单元的实现,这些功能单元尤其包括斜率限制器10和限制器/补偿器11。
53.初步制动命令c
pr
é
l
施加到斜率限制器10的输入端。斜率限制器10使得以下成为可能:在制动开始时、在制动致动器施加制动力时限制出现的力峰值。
54.因此,在斜率限制器10的输出处生成制动命令c
om
。
55.制动命令c
om
因此施加在限制器/补偿器11的第一输入端e1。限制器/补偿器11包括第二输入端e2,经由该输入端e2实时获取机轮2的速度v(t)。
56.机轮2的速度v(t)是基于直升机地面速度的测量来估计的。当然,可以不同地获得机轮速度2,例如通过借助于安装在机轮2上的转速表直接测量机轮速度2。
57.限制器/补偿器11对制动命令c
om
应用动态校正。
58.动态校正的目的是确保制动器3响应于制动命令c
om
而对机轮2施加制动扭矩,无论机轮速度2如何,该制动扭矩实际上是恒定的。动态校正是制动命令和机轮速度2的函数。
59.在制动开始时,当机轮2的速度v(t)大于或等于预定速度阈值时,动态校正包括产生大于制动命令c
om
的经校正制动命令c
corr
。
60.随后,当机轮2的速度v(t)变得小于预定速度阈值时,动态校正包括减小经校正制动命令c
corr
,其结果是经校正制动命令c
corr
变得小于制动命令c
om
。
61.在限制器/补偿器11的输出端s上产生经校正制动命令c
corr
。
62.动态校正包括将制动命令c
om
乘以校正系数cc,该系数取决于制动命令c
om
和机轮2的速度v(t)。
63.从而,因此:
64.c
corr
=cc(c
om
,v(t))x c
om
,
65.其中c
corr
是经校正制动命令,c
om
是制动命令,v(t)是机轮速度2,而cc(c
om
,v(t))是取决于制动命令c
om
和机轮2的速度v(t)的校正系数。
66.参考图6,对于给定的制动命令c
om
,当机轮2的速度v(t)大于或等于预定速度阈值sv时,校正系数cc具有恒定值,该值仅取决于给定制动命令c
om
。该恒定值是制动命令c
om
的递增函数。
67.曲线部分15对应于最大制动命令,曲线部分16对应于最小制动命令,而曲线部分17对应于在最大制动命令和最小制动命令之间的中间制动命令。这里,最小制动命令是在其下没有实现动态校正的制动命令,而最大制动命令是在其上没有实现动态校正的制动命令。
68.可以看出,对应于最大制动命令的最大校正系数c
cmax
大于对应于中间制动命令的中间校正系数c
cint
,后者本身大于对应于最小制动命令的最小校正系数c
cmin
。因此,校正系数cc受到最小校正系数c
cmin
和最大校正系数c
cmax
的限制,这使得有可能避免校正器故障导致过低或过高的经校正制动命令。
69.对于给定制动命令c
om
,当机轮2的速度v(t)小于预定速度阈值sv时,校正系数cc是机轮速度2的线性递增函数。
70.线性函数的斜率是制动命令c
om
的递增函数。
71.从图6可以看出,对应于最大制动命令的线性函数19的梯度大于对应于中间制动命令的线性函数20的斜率,后者本身大于对应于最小制动命令的线性函数21的梯度。
72.还应注意,在零速度v(t)下,校正系数cc的值是制动命令c
om
的递减函数。
73.因此,对于最大制动命令,零速度v(t)下的校正系数cc的值22小于针对中间制动命令的零速度v(t)下的校正系数cc的值23,后者本身小于针对最小制动命令的零速度v(t)下的校正系数cc的值24。
74.还可以看出,无论制动命令如何,线性函数19、20、21都会经过一个相同的点p,该点p由预定义的机轮速度值v
p
和预定义的校正系数值c
cp
定义。
75.例如,预定速度阈值sv等于11m/s。该预定速度阈值可受到制动命令的值和预定机轮速度值的影响。
76.校正系数c
cp
的预定义值在这里等于1。
77.因此,经校正制动命令c
corr
被转换成位置设定点c
ons
。根据第二预定曲线25,位置设定点c
ons
取决于经校正制动命令。位置设定点c
ons
是机轮2制动器3的制动致动器的按钮的线性位置值。制动计算机6使用由位于制动致动器上的位置传感器提供的线性位置的测量,并实现从动26以命令制动致动器的按钮的线性位置。
78.因此,制动计算机6通过使用经校正制动命令c
corr
来控制机轮2制动器3的制动致动器。
79.这里要注意,根据本发明的制动方法没有实现扭矩或力从动。制动命令和经校正制动命令是力命令,但不进行扭矩或力测量。因此,根据本发明的制动方法不需要任何扭矩
或力传感器。
80.还规定,该技术解决方案的实现需要两个分开的步骤。
81.在第一步骤期间,对大量恒定制动力命令制动测试数据文件的表征使得有可能建立扭矩随速度演化的模型,并且因此使得标识速度阈值sv成为可能。该模型独立于初始制动速度。
82.在sv以下,平均扭矩随转速降低而增加。因此,必须限制这种增长,并实现限制功能。
83.在sv以上,平均扭矩的稳定性是可以接受的。然而,平均扭矩小于总平均制动扭矩(由于上述现象)。因此,它必须增加,以补偿由于限制功能而导致的性能下降。因此,实现了补偿功能。
84.在第二步骤中,一旦建立了模型,就确立了校正系数,以便动态地适应机轮速度,但也适应制动命令,因为要应用的补偿和/或限制水平取决于飞行员或航空电子设备的请求。
85.当然,本发明不限于所描述的实施例,而是包括进入本发明领域的,诸如权利要求所定义的任何变体。
86.这里,描述了制动计算机产生发送到机轮的制动命令,并且根据动态校正对制动命令进行校正,该动态校正是制动命令和机轮速度的函数。当然,制动命令可以是发送给几个机轮的总体命令。同样,使用的速度可以是代表若干机轮的(测得或估计的)速度的速度(例如,这些机轮的速度的平均值)。
87.实现本发明的制动系统的体系结构当然可以不同于这里介绍的架构。制动系统不一定是电制动系统,而是可以是例如液压制动系统(在这种情况下,根据液压进行校正,而不是根据旨在转换成位置设定点的制动命令进行校正)。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。