1.本发明涉及一种用于控制车辆的自动驾驶运行的设备。
背景技术:
2.在现有技术中已知自动驾驶控制器(adc)中的单冗余。通过单冗余,在ad套件的重要部件出现任何单故障的情况下,必须触发一个回退级别(fallback level),该回退级别包括立即停车(退化级别1)。由于架构复杂,可能会非常频繁地需要此回退级别并导致所谓的“瘫痪”。在制动系统(ebs)中实现第二回退级别作为对于双重故障的紧急停车(退化级别2)。
技术实现要素:
3.本发明所基于的任务是提供一种改进的用于控制车辆的自动驾驶运行的设备。
4.根据本发明,所述任务通过根据权利要求1的设备来解决。
5.本发明的有利实施方式是从属权利要求的技术方案。
6.根据本发明的用于控制车辆的自动驾驶运行的设备包括至少两个制动系统、至少两个转向系统、发动机控制器、第一自动驾驶控制器和第二自动驾驶控制器、环境传感器组件和惯性传感器,所述自动驾驶控制器设计成冗余的并且配置用于基于环境传感器组件和惯性传感器的信号规划车辆的轨迹并生成沿规划的轨迹行驶所需的加速度和转向角的目标值并将所述目标值传输给制动系统、转向系统和发动机控制器。根据本发明,设置第三自动驾驶控制器,该第三自动驾驶控制器至少构造用于控制车辆停车,所述设备配置成,使得仅当所述制动系统、转向系统和至少其中两个自动驾驶控制器能正常运行时,才启动和/或保持自动驾驶运行,并且如果只有其中一个自动驾驶控制器可正常运行和/或如果制动系统之一和/或转向系统之一和/或发动机控制器不能正常运行,则终止自动驾驶运行,在这种情况下仍正常运行的所述自动驾驶控制器接管车辆控制并引导车辆停车。
7.为了实现高的功能可靠性,所述设备包括多个控制器、多个转向系统和多个制动系统。根据不同的传感器信号,控制器规划轨迹并生成加速度目标值和转向角目标值,以便沿规划的轨迹行驶。这些目标值由车辆上的转向和制动系统以及发动机控制器进行调节。发动机控制器设置用于在车辆的驱动单元(内燃机/电动机)中实现由制动系统预定的目标扭矩。
8.根据本发明,设置至少三个控制器,其中一个设计为仅用于引导车辆停车的副控制器,而其它控制器设计为用于自动引导车辆的主控制器。仅当并且只要转向和制动系统以及至少两个控制器可正常运行,才会启动和执行自动驾驶运行。如果只有一个控制单元可正常运行或者如果转向系统之一或制动系统之一或发动机控制器不能再正常运行,则终止自动驾驶运行并且仍正常运行的所述控制器接管车辆的控制并有针对性地引导其停车。
9.通过给两个常用的自动驾驶主控制器增加第三个简单的自动驾驶控制器(adc),可显著提高整个系统的可用性并针对常见原因和在两个自动驾驶主控制器时的系统故障
提供更大的安全性。第二回退级别的质量和性能通过在这个回退级别中使用环境传感器组件而可显著提高。通过增加这个回退级别,整体退化方案再次得到显著改善。
10.通过以另一个回退级别来扩展退化方案会产生以下优点:
[0011]-提高自动驾驶功能的可用性(不可用性大约减半),
[0012]-对于双重故障或系统故障也有高质量的回退级别可用,
[0013]-在发生任何单故障时确保车道保持,并且
[0014]-将制动系统中的紧急停车(最后的回退级别)的概率降至最低。
[0015]
在一种实施方式中,第三自动驾驶控制器仅构造用于控制车辆停车。所述附加的第三自动驾驶控制器例如是副控制器,其功能范围小于设计为主控制器的自动驾驶控制器。所述附加的第三自动驾驶控制器因此也能够以比自动驾驶控制器更低的成本制造。在该实施方式中,第三自动驾驶控制器不设计用于继续自动驾驶运行。第三自动驾驶控制器仅设计用于引导车辆安全停车。在此力求在尽可能安全的位置中、例如在路边停车。
[0016]
在一种实施方式中,所述两个制动系统彼此冗余和/或所述两个转向系统彼此冗余。
[0017]
在一种实施方式中,所述两个制动系统和转向系统之一连接到第一致动器总线并且与第一自动驾驶控制器连接,和/或两个制动系统和另一个转向系统连接到第二致动器总线并且与第二自动驾驶控制器连接。
[0018]
在一种实施方式中,所述第一自动驾驶控制器和第二自动驾驶控制器通过运动传感器总线相互连接并且与第一运动传感器总成连接,和/或第二运动传感器总成连接到第二致动器总线上。
[0019]
在一种实施方式中,所述第三自动驾驶控制器连接到第一致动器总线和第二致动器总线上。
[0020]
在一种实施方式中,设置用于为转向系统之一和制动系统之一供电的第一供电单元和/或设置用于为第一自动驾驶控制器和第一运动传感器总成供电的第二供电单元和/或设置用于为另一个制动系统、另一个转向系统、第二自动驾驶控制器和第二运动传感器总成供电的第三供电单元。
[0021]
所述第三自动驾驶控制器连接到第一供电单元或第二供电单元或第三供电单元或第四供电单元上。
[0022]
在一种实施方式中,所述构造为副控制器的第三自动驾驶控制器和所述两个构造为主控制器的第一和第二自动驾驶控制器构造用于通过传感器com总线访问环境传感器组件。
附图说明
[0023]
下面参照附图详细阐述本发明的实施例。附图如下:
[0024]
图1示出根据现有技术的用于控制车辆的自动驾驶运行的设备的示意图;和
[0025]
图2示出根据本发明的用于控制车辆的自动驾驶运行的设备的示意图。
具体实施方式
[0026]
在所有附图中,彼此相应的部件设有相同的附图标记。
[0027]
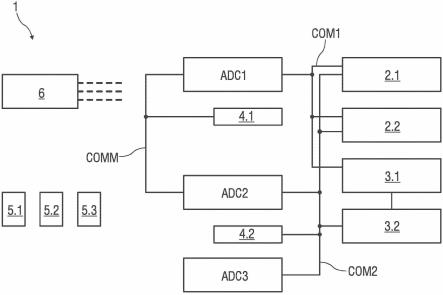
图1示出根据现有技术的用于控制车辆的自动驾驶运行的设备1的示意图。
[0028]
所述设备1包括彼此冗余的第一制动系统2.1和第二制动系统2.2。此外,设有彼此冗余的第一转向系统3.1和第二转向系统3.2。第一制动系统2.1、第二制动系统2.2和第一转向系统3.1连接到第一致动器总线com1上并且与第一自动驾驶控制器adc1连接。此外,第一制动系统2.1和第二转向系统3.2连接到第二致动器总线com2上并且与第二自动驾驶控制器adc2连接。第一自动驾驶控制器adc1和第二自动驾驶控制器adc2通过运动传感器总线comm相互连接并且与第一运动传感器总成4.1连接。第二运动传感器总成4.2连接到第二致动器总线com2上。
[0029]
第一供电单元5.1用于为第一转向系统3.1和第二制动系统2.2供电。第二供电单元5.2用于为第一自动驾驶控制器adc1和第一运动传感器总成4.1供电。第三供电单元5.3用于为第一制动系统2.1、第二转向系统3.2、第二自动驾驶控制器adc2和第二运动传感器总成4.2供电。
[0030]
环境传感器组件6包含环境传感器系统,该环境传感器系统例如包括一个或多个雷达传感器、激光雷达传感器、摄像机,它们的信号(例如通过传感器com总线)被传输到自动驾驶控制器adc1、adc2。
[0031]
运动传感器总成4.1、4.2包含惯性传感器系统,其各包括用于三个坐标轴的三个转速传感器和三个惯性传感器。dgnss(差分全球导航卫星系统)传感器系统安装在适合的位置上、例如运动传感器总成4.1、4.2之一中,以用于卫星辅助定位。
[0032]
自动驾驶控制器adc1、adc2设计成冗余的。它们并行工作并执行相同的任务:它们基于环境传感器组件6的传感器、运动传感器总成4.1、4.2的惯性传感器和dgnss传感器的信号规划待由车辆自动行驶的轨迹并确定沿规划的轨迹行驶所需的加速度和转向角的目标值。
[0033]
加速度的目标值被传输到冗余设计的制动系统2.1、2.2和未示出的发动机控制器。发动机控制器可以但不一定设计成冗余的。发动机控制器将正的和部分负的加速度目标值转换为驱动扭矩或回收扭矩并且制动系统2.1、2.2将负的加速度目标值(即减速度值)转换为车辆制动器上的制动扭矩。
[0034]
转向角的目标值被传输到同样冗余设计的转向系统3.1、3.2,所述转向系统相应于目标值地调节车辆的可转向车轮上的转向角。
[0035]
两个转向系统3.1、3.2一起工作。它们这样设计,使得它们也可单独完成其任务,即,如果转向系统3.1、3.2之一发生故障,则另一个仍正常运行的转向系统3.1、3.2继续单独工作。但是它必须做更多的工作。仍正常运行的转向系统3.1、3.2从所述另一转向系统3.1、3.2不为转向致动器提供控制信号的事实识别出所述另一转向系统3.1、3.2的故障。正常运行的转向系统3.1、3.2将所述另一转向系统3.1、3.2的故障报告给两个自动驾驶控制器adc1、adc2,使得它们能够对进一步的驾驶运行做出决定。
[0036]
两个制动系统2.1、2.2一起工作。它们这样设计,使得它们也可单独完成其任务,即,如果制动系统2.1、2.2之一发生故障,则仍正常运行的制动系统2.1、2.2继续单独工作。但是它必须做更多的工作。仍正常运行的制动系统2.1、2.2从所述另一制动系统2.1、2.2不为制动致动器提供控制信号的事实识别出所述另一制动系统2.1、2.2的故障。正常运行的制动系统2.1、2.2将所述另一制动系统2.1、2.2的故障报告给自动驾驶控制器adc1、adc2,
使得它们能够对进一步的驾驶运行做出决定。在一种实施方式中,第一制动系统2.1可包括电子稳定程序。第二制动系统2.2可包括电子制动助力器。
[0037]
由于两个自动驾驶控制器adc1、adc2并行工作,如果它们可完全正常运行,则它们也并行提供相应的目标值并且这些目标值也都在预定的有效范围内。制动系统2.1、2.2和转向系统3.1、3.2识别这一点并在这种情况下仅基于自动驾驶控制器adc1、adc2之一的目标值进行转向或制动干预。在进行转向或制动干预时,不考虑所述另一自动驾驶控制器adc1、adc2的目标值。如果自动驾驶控制器adc1、adc2之一没有提供目标值或提供了无效(在有效范围之外)的目标值,则推断相应的自动驾驶控制器adc1、adc2发生故障并向仍正常运行的自动驾驶控制器adc1、adc2发出相应的通知。
[0038]
如果转向系统3.1、3.2之一或制动系统2.1、2.2之一发生故障,则车辆借助仍正常运行的系统2.1、2.2、3.1、3.2安全地制动到停车。在此力求在尽可能安全的位置中、例如在路边停车。
[0039]
这同样也适用于自动驾驶控制器adc1、adc2之一发生故障的情况,与由于自动驾驶控制器adc1、adc2之一的内部故障,还是由于供电单元5.1、5.2、5.3的故障或是由于致动器总线com1、com2之一的故障无关。这导致,如果第一自动驾驶控制器adc1发生故障,则车辆不能继续行驶,尽管第二自动驾驶控制器adc2仍可完全正常运行并且自动驾驶因此本可以继续。只有在存在冗余的情况下才允许自动驾驶,如果第一自动驾驶控制器adc1发生故障,则不再允许自动驾驶。如果第二自动驾驶控制器adc2发生故障并且第一自动驾驶控制器adc1仍可完全正常运行,则这同样适用。
[0040]
如果两个自动驾驶控制器adc1和adc2都发生故障,则借助第一制动系统2.1有针对性地将车辆制动到停车。该第一制动系统2.1在此基于第二运动传感器总成4.2的惯性传感器的信号进行横向动态控制(通过转向干预(转向角控制)),以便在制动过程中将车辆稳定地保持在车道中。
[0041]
图2示出根据本发明的用于控制车辆的自动驾驶运行的设备1的示意图。
[0042]
所述设备1包括彼此冗余的第一制动系统2.1和第二制动系统2.2。此外,设有彼此冗余的第一转向系统3.1和第二转向系统3.2。第一制动系统2.1、第二制动系统2.2和第一转向系统3.1连接到第一致动器总线com1上并且与第一自动驾驶控制器adc1连接。此外,第一制动系统2.1、第二制动系统2.2和第二转向系统3.2连接到第二致动器总线com2上并且与第二自动驾驶控制器adc2连接。第一自动驾驶控制器adc1和第二自动驾驶控制器adc2通过运动传感器总线comm相互连接并且与第一运动传感器总成4.1连接。第二运动传感器总成4.2连接到第二致动器总线com2上。
[0043]
此外,设有第三自动驾驶控制器adc3,其连接到第一致动器总线com1和第二致动器总线com2上,并且因此第二运动传感器总成4.2的信号也提供给第三自动驾驶控制器。
[0044]
第一供电单元5.1用于为第一转向系统3.1、第二制动系统2.2和第三自动驾驶控制器adc3供电。第二电源单元5.2用于为第一自动驾驶控制器adc1和第一运动传感器总成4.1供电。第三供电单元5.3用于为第一制动系统2.1、第二转向系统3.2、第二自动驾驶控制器adc2和第二运动传感器总成4.2供电。第三自动驾驶控制器adc3也可由所述其它供电单元5.2、5.3中的任一个或另外的第四供电单元供电。
[0045]
环境传感器组件6包含环境传感器系统,该环境传感器系统例如包括一个或多个
雷达传感器、激光雷达传感器、摄像机,它们的信号被传输到自动驾驶控制器adc1、adc2、adc3。
[0046]
运动传感器总成4.1、4.2包含惯性传感器系统,该惯性传感器系统各包括用于三个坐标轴的三个转速传感器和三个惯性传感器。dgnss(差分全球导航卫星系统)传感器系统安装在适合的位置上、例如运动传感器总成4.1、4.2之一中,以用于卫星辅助定位。
[0047]
自动驾驶控制器adc1、adc2是主控制器。它们设计成冗余的。它们并行工作并执行相同的任务:它们基于环境传感器组件6的传感器、运动传感器总成4.1、4.2的惯性传感器和dgnss传感器的信号规划待由车辆自动行驶的轨迹并确定沿规划的轨迹行驶所需的加速度和转向角的目标值。所述附加的第三自动驾驶控制器adc3是副控制器,其功能范围小于设计为主控制器的自动驾驶控制器adc1、adc2。所述附加的第三自动驾驶控制器adc3因此也可以比自动驾驶控制器adc1、adc2以更低的成本制造。第三自动驾驶控制器adc3不设计用于继续自动驾驶运行。第三自动驾驶控制器adc3仅设计用于引导车辆安全停车。在此力求在尽可能安全的位置中、例如在路边停车。
[0048]
加速度的目标值被传输到冗余设计的制动系统2.1、2.2和未示出的发动机控制器。发动机控制器可以但不一定设计成冗余的。发动机控制器将正的和部分负的加速度目标值转换为驱动扭矩或回收扭矩并且制动系统2.1、2.2将负的加速度目标值(即减速度值)转换为车辆制动器上的制动扭矩。
[0049]
转向角的目标值被传输到同样冗余设计的转向系统3.1、3.2,所述转向系统相应于目标值调节车辆的可转向车轮上的转向角。
[0050]
两个转向系统3.1、3.2一起工作。它们这样设计,使得它们也可单独完成其任务,即,如果转向系统3.1、3.2之一发生故障,则另一个仍正常运行的转向系统3.1、3.2继续单独工作。但是它必须做更多的工作。仍正常运行的转向系统3.1、3.2从所述另一转向系统3.1、3.2不为转向致动器提供控制信号的事实识别出所述另一转向系统3.1、3.2的故障。正常运行的转向系统3.1、3.2将所述另一转向系统3.1、3.2的故障报告给两个自动驾驶控制器adc1、adc2,使得它们能够对进一步的驾驶运行做出决定。
[0051]
两个制动系统2.1、2.2一起工作。它们这样设计,使得它们也可单独完成其任务,即,如果制动系统2.1、2.2之一发生故障,则仍正常运行的制动系统2.1、2.2继续单独工作。但是它必须做更多的工作。仍正常运行的制动系统2.1、2.2从所述另一制动系统2.1、2.2不为制动致动器提供控制信号的事实识别出所述另一制动系统2.1、2.2的故障。正常运行的制动系统2.1、2.2将所述另一制动系统2.1、2.2的故障报告给自动驾驶控制器adc1、adc2,使得它们能够对进一步的驾驶运行做出决定。在一种实施方式中,第一制动系统2.1可包括电子稳定程序。第二制动系统2.2可包括电子制动助力器。
[0052]
由于两个自动驾驶控制器adc1、adc2并行工作,如果它们可完全正常运行,则它们也并行提供相应的目标值并且这些目标值也都在预定的有效范围内。制动系统2.1、2.2和转向系统3.1、3.2识别这一点并在这种情况下仅基于自动驾驶控制器adc1、adc2之一的目标值进行转向或制动干预。在进行转向或制动干预时,不考虑所述另一自动驾驶控制器adc1、adc2的目标值。如果自动驾驶控制器adc1、adc2之一没有提供目标值或提供了无效(在有效范围之外)的目标值,则推断相应的自动驾驶控制器adc1、adc2发生故障并向仍正常运行的自动驾驶控制器adc1、adc2发出相应的通知。
[0053]
如果转向系统3.1、3.2之一或制动系统2.1、2.2之一发生故障,则车辆借助仍正常运行的系统2.1、2.2、3.1、3.2安全地制动到停车。在此力求在尽可能安全的位置中,例如在路边停车。
[0054]
如果自动驾驶控制器adc1、adc2之一发生故障,则无论是由于自动驾驶控制器adc1、adc2之一的内部故障,还是由于供电单元5.1、5.2、5.3的故障或是由于致动器总线com1、com2之一的故障,则未发生故障的自动驾驶控制器adc1、adc2接管控制任务并且车辆因此继续其自动驾驶(第一回退级别:继续自动驾驶运行)。附加的第三自动驾驶控制器adc3可用作附加安全装置,其在到目前为止尚未发生故障的自动驾驶控制器adc1、adc2也出现附加故障时接管车辆的控制并将车辆制动到停车(第二回退级别:终止自动驾驶运行)。构造为主控制器的两个自动驾驶控制器adc1、adc2之一的故障因此不会导致车辆“不能继续行驶”,只要构造为副控制器的自动驾驶控制器adc3可正常运行即可。
[0055]
如果两个自动驾驶控制器adc1和adc2都发生故障,则第三自动驾驶控制器adc3接管控制并借助仍可正常运行的系统将车辆安全制动到停车。在此力求在尽可能安全的位置中、例如在路边停车。
[0056]
如果构造为主控制器的两个自动驾驶控制器adc1和adc2发生故障并且附加地构造为副控制器的第三自动驾驶控制器adc3也发生故障,则借助第一制动系统2.1有针对性地将车辆制动到停车。该第一制动系统2.1在此基于第二运动传感器总成4.2的惯性传感器的信号进行横向动态控制(通过转向干预(转向角控制)),以便在制动过程中将车辆稳定地保持在车道中。
[0057]
如果构造为主控制器的自动驾驶控制器之一adc1或adc2和构造为副控制器的第三自动驾驶控制器adc3发生故障,则未发生故障的构造为主控制器的自动驾驶控制器adc1或adc2接管控制任务并引导车辆停车。自动驾驶在此情况下不会继续。
[0058]
如果构造为副控制器的第三自动驾驶控制器adc3发生故障,则控制任务继续由构造为主控制器的自动驾驶控制器adc1完成并且车辆因此继续其自动驾驶(第一回退级别:继续自动驾驶)。构造为主控制器的第二自动驾驶控制器adc2可用作附加安全装置,其在第一自动驾驶控制器adc1也发生附加故障的情况下接管车辆的控制并将车辆制动到停车(第二回退级别:终止自动驾驶运行)。因此,构造为副控制器的第三自动驾驶控制器adc3的故障不会导致车辆“不能继续行驶”,只要两个构造为主控制器的自动驾驶控制器adc1和adc2仍可正常运行即可。
[0059]
在一种实施例中,构造为副控制器的第三自动驾驶控制器adc3可替代或附加地连接到第一致动器总线com1上。作为替代方案,构造为副控制器的第三自动驾驶控制器adc3的供电也可由另外两个供电单元5.1、5.3中的一个供电。作为进一步提高可用性的其它可能性也可使用附加的第四车载电气网络。除了两个构造为主控制器的自动驾驶控制器adc1、adc2之外,构造为副控制器的第三自动驾驶控制器adc3也可访问环境传感器组件6的整个传感器系统,例如通过传感器com总线。
[0060]
附图标记列表
[0061]1ꢀꢀꢀꢀ
设备
[0062]
2.1
ꢀꢀ
第一制动系统
[0063]
2.2
ꢀꢀ
第二制动系统
[0064]
3.1
ꢀꢀ
第一转向系统
[0065]
3.2
ꢀꢀ
第二转向系统
[0066]
4.1
ꢀꢀ
第一运动传感器总成
[0067]
4.2
ꢀꢀ
第二运动传感器总成
[0068]
5.1
ꢀꢀ
第一供电单元
[0069]
5.2
ꢀꢀ
第二供电单元
[0070]
5.3
ꢀꢀ
第三供电单元
[0071]6ꢀꢀꢀꢀ
环境传感器组件
[0072]
adc1
ꢀꢀ
第一自动驾驶控制器
[0073]
adc2
ꢀꢀ
第二自动驾驶控制器
[0074]
adc3
ꢀꢀ
第三自动驾驶控制器
[0075]
com1
ꢀꢀ
第一致动器总线
[0076]
com2 第二致动器总线
[0077]
comm 运动传感器总线
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。