用于水平预清洁模块的垫载体
1.背景
技术领域
2.本文描述的实施例总体涉及用于制造电子器件的设备,并且更具体地,涉及一种可用于在半导体器件制造工艺中清洁基板的表面的水平预清洁(hpc)模块。
3.相关技术的描述
4.化学机械抛光(cmp)通常用于制造高密度集成电路,以平面化或抛光沉积在基板上的材料层。在cmp工艺中使用的水平预清洁(hpc)模块中,旋转磨光垫被压靠在基板的表面上的材料层上,并且通过由抛光液提供的化学和机械活动与磨光垫和基板的相对运动的组合来跨材料层去除材料。与由材料(诸如多孔材料或填充或未填充聚合物材料)形成的常规磨光垫相比,由聚乙烯醇(pva)材料形成的磨光垫因机械强度和耐磨性而为化学和机械抛光提供了高剪切力。pva材料是吸水、柔软且弹性的,而且固有地比常规材料更厚且更大。此外,更大的磨光垫提高了性能并减少了在化学机械清洁中的磨光时间。然而,由pva材料形成的磨光垫在由垫载体支撑时可能因固有的更厚且更大的尺寸而下垂。
5.因此,需要用于支撑大且厚的吸水磨光垫而同时防止该磨光垫下垂的系统和方法。
技术实现要素:
6.本公开内容的实施例提供了一种水平预清洁模块。所述水平预清洁模块包括:腔室,所述腔室包括共同地限定处理区域的盆和盖;可旋转真空台,所述可旋转真空台设置在所述处理区域中,所述可旋转真空台包括基板接收表面;垫调节站,所述垫调节站靠近所述可旋转真空台;垫载体定位臂,所述垫载体定位臂具有第一端和远离所述第一端的第二端;垫载体组件,所述垫载体组件耦接到所述垫载体定位臂的所述第一端;和致动器,所述致动器耦接到所述垫载体定位臂的所述第二端并且被配置为使所述垫载体组件在所述可旋转真空台上方的第一位置与在所述垫调节站上方的第二位置之间摆动。所述垫载体组件包括万向节基座和耦接到所述万向节基座的垫载体,所述万向节基座和所述垫载体被配置为通过机械夹持机构和抽吸夹持机构支撑磨光垫。
7.本公开内容的实施例还提供了一种用于水平预清洁模块中的垫载体组件。一种垫载体组件包括:万向节基座;和垫载体,所述垫载体耦接到所述万向节基座。所述万向节基座和所述垫载体被配置为通过机械夹持机构和抽吸夹持机构支撑磨光垫。
8.本公开内容的实施例还提供了一种在水平预清洁模块中支撑磨光垫的方法。所述方法包括:通过万向节基座的唇部分和垫载体的锥形部分将磨光垫机械地夹持在所述磨光垫的周边边缘上,其中所述万向节基座和所述垫载体耦接并设置在水平预清洁模块中;和通过抽吸夹持机构支撑所述磨光垫并防止所述磨光垫下垂。
附图说明
9.为了可详细地理解本公开内容的上述特征,可参考实施例来得到以上简要地概述的本公开内容的更具体的描述,实施例中的一些示出在附图中。然而,需注意,附图仅仅示出了本公开内容的典型实施例,并且因此不应当被视为对其范围的限制,并且本公开内容可允许其他等效实施例。
10.图1a是根据一个或多个实施例的示例性化学机械抛光(cmp)处理系统的示意性平面图,该cmp处理系统使用本文描述的水平预清洁(hpc)模块。
11.图1b是根据一个或多个实施例的示例性cmp处理系统的顶部等距视图,其可对应于图1a所示的示意图。
12.图1c是根据一个或多个实施例的图1b的cmp处理系统的顶视图,其可对应于图1a所示的示意图。
13.图2a是根据一个或多个实施例的示例性hpc模块的一侧的顶部等距视图。
14.图2b是图2a的hpc模块的一侧的另一个顶部等距视图。
15.图2c是图2a的hpc模块另一侧的顶部等距视图。
16.图3a是根据一个或多个实施例的示例性hpc模块的平面图。
17.图3b是根据一个或多个实施例的示例性垫调节站的侧截面图。
18.图3c是根据一个或多个实施例的示例性垫载体定位臂的侧截面图。
19.图4a是根据一个或多个实施例的示例性万向节基座和垫载体的侧截面图。
20.图4b和图4c是根据一个或多个实施例的垫载体的平面图和侧截面图。
21.图4d是根据一个或多个实施例的垫载体的侧截面图。
22.图4e和图4f是根据一个或多个实施例的磨光垫的顶视图。
23.为了促成理解,已经尽可能使用相同的附图标记标示各图共有的相同要素。设想的是,实施例的要素和特征可有益地结合在其他实施例中,而无需进一步陈述。
具体实施方式
24.本文描述的实施例总体涉及用于制造电子器件的设备,并且更具体地,涉及一种可用于在半导体器件制造工艺中清洁基板的表面的水平预清洁(hpc)模块。
25.由聚乙烯醇(pva)材料制成的磨光垫因机械强度和耐磨性而可为化学和机械抛光提供高剪切力。然而,pva材料是吸水、柔软且弹性的,而且固有地比常规材料更厚且更大,并且因此由pva材料形成的磨光垫在由垫载体支撑时可能下垂。
26.在本文描述的实施例中,垫载体支撑大且厚的吸水磨光垫而同时在化学机械清洁期间通过机械夹持机构和抽吸夹持机构防止磨光垫下垂。
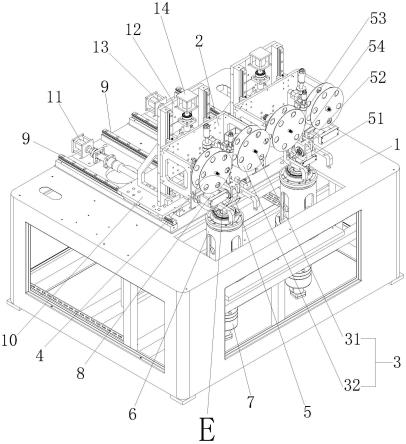
27.图1a是根据一个或多个实施例的示例性化学机械抛光(cmp)处理系统100的示意性平面图,该cmp处理系统使用本文描述的水平预清洁(hpc)模块。图1b是根据一个或多个实施例的示例性cmp处理系统100的顶部等距视图,其可对应于图1a所示的示意图。图1c是根据一个或多个实施例的图1b的cmp处理系统100的顶视图,其可对应于图1a所示的示意图。在图1b和图1c中,省略了外壳的某些部分和某些其他内部和外部部件,以更清楚地显示cmp处理系统100内的hpc模块。这里,cmp处理系统100包括第一部分105和耦接到第一部分105并与其集成的第二部分106。第一部分105是具备多个抛光站(未示出)的基板抛光部分。
28.第二部分106包括一个或多个cmp后清洁系统110、多个系统装载站130、一个或多个基板搬运器(例如第一机器人124和第二机器人150)、一个或多个计量站140、一个或多个位置特定抛光(lsp)模块142、一个或多个hpc模块200和一个或多个干燥单元170。hpc模块200被配置为处理以基本上水平的取向(即,在x-y平面中)设置的基板120。在一些实施例中,第二部分106可选地包括一个或多个竖直清洁模块112,该一个或多个竖直清洁模块被配置为处理以基本上竖直的取向(即,在z-y平面中)设置的基板120。
29.每个lsp模块142典型地被配置为使用具有小于要抛光基板120的表面积的表面积的抛光构件(未示出)仅抛光基板表面的一部分。lsp模块142通常在基板120已经用抛光模块抛光之后使用以从基板的相对小的部分修整(例如,去除额外材料)。
30.计量站140用于在抛光之前和/或之后测量设置在基板120上的材料层的厚度,在抛光之后检查基板120以确定材料层是否已经从其场表面清除,和/或在抛光之前和/或之后检查基板表面是否存在缺陷。在那些实施例中,基板120可基于使用计量站140获得的测量或表面检查结果而返回到抛光垫以进一步抛光和/或引导到不同基板处理模块或站(诸如第一部分105内的抛光模块)或lsp模块142。如图1a所示,计量站140和lsp模块142位于第二部分106的区域中,该区域在cmp后清洁系统110中的一者的部分上方(在z方向上)。
31.第一机器人124被定位成将基板120传送进出多个系统装载站130,例如,在多个系统装载站130与第二机器人150之间和/或在cmp后清洁系统110与多个系统装载站130之间传送。在一些实施例中,第一机器人124被定位成在系统装载站130中的任一者与定位在其附近的处理系统之间传送基板120。例如,在一些实施例中,第一机器人124可用于在系统装载站130中的一者与计量站140之间传送基板120。
32.第二机器人150用于在第一部分105与第二部分106之间传送基板120。例如,这里,第二机器人150被定位成将从第一机器人124接收的要抛光基板120传送到第一部分105以在其中进行抛光。然后,使用第二机器人150将经抛光基板120从第一部分105(例如从第一部分105内的传送站(未示出))传送到hpc模块200中的一者和/或在位于第二部分106内的不同站和模块之间传送。替代地,第二机器人150将基板120从第一部分105内的传送站传送到lsp模块142或计量站140中的一者。第二机器人150还可将基板120从lsp模块142或计量站140中的任一者传送到第一部分105以在其中进一步抛光。
33.图1a中的cmp处理系统100具备设置在第二机器人150的任一侧上的两个cmp后清洁系统110。在图1a中,cmp后清洁系统110中的一者的至少一些模块(例如,一个或多个竖直清洁模块112)位于计量站140和lsp模块142下方(在z方向上)并且因此未示出。计量站140和lsp模块142未在图1c中示出。在一些其他实施例中,cmp处理系统100仅具有一个cmp后清洁系统110。这里,cmp后清洁系统110中的每一者包括hpc模块200、一个或多个竖直清洁模块112(例如刷或喷射箱)、干燥单元170和用于在两者间传送基板120的基板搬运器180。这里,每个hpc模块200都设置在第二部分106内靠近第一部分105的位置。
34.典型地,hpc模块200通过形成在hpc模块200的侧面板中的第一开口(未示出)(例如通过设置在侧面板中的门或狭缝阀)从第二机器人150接收经抛光基板120。基板120由hpc模块200以水平取向接收以定位在hpc模块200中的水平地设置的基板支撑表面上。然后,hpc模块200在使用基板搬运器180从该hpc模块传送基板120之前在基板120上执行预清洁工艺,诸如磨光工艺。
35.基板120通过第二开口(这里是开口224(图1b))从hpc模块200传送,该第二开口典型地是穿过hpc模块200的第二侧面板设置的水平狭槽,可用门(例如狭缝阀)关闭。因此,当基板120从hpc模块200传送时,该基板仍处于水平取向。在基板120从hpc模块200传送之后,基板搬运器180使基板120摆动到竖直位置以在cmp后清洁系统110的竖直清洁模块112中进一步处理。
36.在该示例中,hpc模块200具有面向cmp处理系统100的第一部分105的第一端202、背向第一端202的第二端204、面向第二机器人150的第一侧206和背向第一侧206的第二侧208。第一侧206和第二侧208在第一202与第二端204之间正交地延伸。
37.多个竖直清洁模块112位于第二部分106内。一个或多个竖直清洁模块112是接触式和非接触式清洁系统中的任一种或组合,以用于从基板的表面去除抛光副产物,例如喷射箱和/或刷箱。
38.干燥单元170用于在基板已经被竖直清洁模块112处理之后和在基板120由第一机器人124传送到系统装载站130之前干燥基板120。这里,干燥单元170是水平干燥单元,使得干燥单元170被配置为在基板120设置在水平取向上时通过开口(未示出)接收基板120。
39.在本文中,基板120使用基板搬运器180来在hpc模块200与竖直清洁模块112之间、在竖直清洁模块112中的各个竖直清洁模块之间以及在竖直清洁模块112与干燥单元170之间移动。
40.在本文的实施例中,包括基板搬运器180的cmp处理系统100的操作由系统控制器160指引。系统控制器160包括可编程中央处理单元(cpu)161,该可编程cpu可与存储器162(例如,非易失性存储器)和支持电路163一起操作。支持电路163常规地耦接到cpu 161,并且包括耦接到cmp处理系统100的各种部件的高速缓存、时钟电路、输入/输出子系统、电源等以及上述项的组合,以促成对cmp处理系统的控制。cpu 161是在工业环境中使用的任何形式的通用计算机处理器中的一种,诸如可编程逻辑控制器(plc),用于控制处理系统的各种部件和子处理器。耦接到cpu 161的存储器162是非暂态的,并且典型地是易获得的存储器中的一者或多者,诸如随机存取存储器(ram)、只读存储器(rom)、软盘驱动器、硬盘或任何其他形式的数字存储设备(本地或远程)。
41.典型地,存储器162是含有指令的非暂态计算机可读存储介质的形式(例如,非易失性存储器),该指令在由cpu 161执行时促成cmp处理系统100的操作。在存储器162中的指令是程序产品的形式,诸如实现本公开内容的方法的程序。程序代码可遵照许多不同编程语言中的任一种。在一些示例中,本公开内容可被实现为存储在用于与计算机系统一起使用的计算机可读存储介质上的程序产品。程序产品的程序定义实施例(包括本文描述的方法)的功能。
42.例示性非暂态计算机可读存储介质包括但不限于:(i)其上可持久地存储信息的不可写存储介质(例如,在计算机内的只读存储器装置,诸如可由cd-rom驱动器读取的cd-rom盘、闪存存储器、rom芯片或任何类型的固态非易失性半导体存储器器件,例如固态驱动器(ssd));和(ii)在其上存储可变更信息的可写存储介质(例如,在磁盘驱动器或硬盘驱动器内的软盘或任何类型的固态随机存取半导体存储器)。当实施指示本文中描述的方法的功能的计算机可读指令时,此类计算机可读存储介质是本公开内容的实施例。在一些实施例中,本文阐述的方法或其部分由一个或多个专用集成电路(asic)、现场可编程门阵列
(fpga)或其他类型的硬件实现方式执行。在一些其他实施例中,本文阐述的基板处理和/或搬运方法由软件例程、asic、fpga和/或其他类型的硬件实现方式的组合执行。一个或多个系统控制器160可与本文描述的各种模块化抛光系统中的一者或任何组合和/或其单独的抛光模块一起使用。
43.图2a是可用于本文描述的cmp处理系统100中的示例性hpc模块200的第二侧208的顶部等距视图。在图2a中,省略了维修进出面板,以更清楚地示出hpc模块200的内部部件。图2b是图2a的hpc模块200的第二侧208的另一个顶部等距视图。在图2b中,进一步省略了盖216的顶面板,以更清楚地示出hpc模块200的内部部件。图2c是图2a的hpc模块200的第一侧206的顶部等距视图。在图2c中,省略了盖216,以更清楚地示出hpc模块200的内部部件。
44.通常,hpc模块200包括由共同地限定处理区域212的多个侧面板形成的腔室210、盆214和盖216。
45.第一侧面板218形成在hpc模块200的面向第二机器人150的第一侧206上。第一侧面板218包括用于用第二机器人150将基板120定位在可旋转真空台230上的第一基板搬运器进出门220。第二侧面板222形成在hpc模块200的背对第一部分105的第二端204上。第二侧面板222包括用于用基板搬运器180从可旋转真空台230移除基板120的第二基板搬运器进出门221。第三侧面板226形成在hpc模块200的第二侧208上。第三侧面板226包括维修进出面板开口228。形成在hpc模块200的相对侧面板上的第一基板搬运器进出门220和维修进出面板开口228的对称性有利地提供了可安装在处理系统100的任一侧上的水平磨光模块,如图1c所示。
46.设置在处理区域212内的hpc模块200进一步包括用于真空吸紧基板120的可旋转真空台230、设置在可旋转真空台230径向外侧的环形基板升降机构270、靠近可旋转真空台230设置的垫调节站280以及可在可旋转真空台230上方的第一位置与在垫调节站280上方的第二位置之间移动的垫载体定位臂300。
47.可旋转真空台230、环形基板升降机构270、垫调节站280和垫载体定位臂300各自独立地安装到盆214。hpc模块200还包括安装到盆214的冲洗歧管290。基板中心冲洗棒292和一个或多个基板喷射棒294从冲洗歧管290的一侧延伸。基板中心冲洗棒292用于将冲洗流体(例如,清洁流体或水)引向可旋转真空台230的中心区域。基板喷射棒294用于将喷雾引向可旋转真空台230的一个或多个其他区域,例如可旋转真空台230的周边区域或侧面部分。冲洗歧管290朝向盆214的角部定位,并且基板中心冲洗棒292和基板喷射棒294在第二侧板222内沿着hpc模块200的第二端204延伸。在一些实施例中,冲洗歧管290与第二侧208相邻(图2a至图2b)。在一些其他实施例中,冲洗歧管290与第一侧206相邻(图2c)。hpc模块200进一步包括安装到盆214的刷冲洗件296。刷冲洗件296朝向hpc模块200的第一端202且邻近垫调节站280定位,以用于冲洗垫调节站280的一个或多个部件。
48.图3a是图2c的hpc模块200的平面图。环形基板升降机构270设置在可旋转真空台230径向外侧。升降机构270包括靠近可旋转真空台230的圆周边缘设置的多个基板接触点272。基板接触点272中的每一者是形成在围绕夹盘232的基板箍274上的面向上肩部。升降机构270被配置为使得当从可旋转真空台230的基板接收表面266抬起基板120时,多个基板接触点272中的一者在多个基板接触点272中的另一者之前接触基板120。环形基板升降机构270与前面描述的真空压力的排放和可选的氮气净化一起作用,以从夹盘232移除基板
120。有利地,相对于仅排放和可选的氮气净化,使用基板升降机构270使得能够使基板120更快地脱离吸持。
49.图3b是可用于图3a的hpc模块200中的示例性垫调节站280的侧截面图。垫调节站280靠近可旋转真空台230设置。垫调节站280包括背对盆214的调节刷282。在一些实施例中,调节刷282包括纤维材料。在一些实施例中,纤维由尼龙或另一种类似的材料形成。调节刷282耦接到可旋转刷轴284。刷轴284延伸穿过流体耦接到调节流体源(未示出)的盆214。刷轴284被配置为将调节流体(例如去离子水)输送到靠近调节刷282设置的喷射喷嘴286。在垫调节站280的操作期间,调节刷282由刷轴284旋转。在旋转期间,调节流体通过刷轴284流到喷射喷嘴286,从而润湿调节刷282并促进调节工艺。
50.图3c是可用于图3a的hpc模块200中的示例性垫载体定位臂300的侧截面图。垫载体定位臂300靠近可旋转真空台230和垫调节站280设置。垫载体定位臂300的远端302包括可竖直地移动的垫载体组件304,以用于在其下端处支撑磨光垫306。垫载体组件304包括用于使磨光垫306围绕轴线c2旋转的头部电机308,该轴线基本上对齐在重力方向上。垫载体组件304包括万向节基座310,该万向节基座通过球面轴承312耦接到头部马达308,从而允许垫载体组件304的磨光表面相对于与轴线c2正交的平面枢转。垫载体组件304进一步包括耦接到万向节基座310的垫载体314。在一些实施例中,垫载体314的尺寸被设定为支撑直径为约134mm的磨光垫306,该直径大于在预清洁模块中使用的常规磨光垫。在一些实施例中,与常规预清洁模块相比,本公开的垫载体定位臂300支撑更大的磨光垫306。
51.图4a是示例性万向节基座310和可用于图3c的垫载体组件304中的垫载体314的侧截面图。在一些实施例中,万向节基座310包括磁体316,并且垫载体314包括磁体318,使得万向节基座310和垫载体314经由磁力耦接。万向节基座310和垫载体314经由定位销320对齐。
52.在一些实施例中,磨光垫306由聚乙烯醇(pva)材料形成。pva材料具有亲水性,并且可吸水和保水。在润湿时,pva材料是弹性、柔性且柔软的,具有机械强度和耐磨性。与用作磨光垫的常规材料(诸如多孔材料或填充或未填充聚合物材料)相比,pva材料为化学和机械清洁提供了高剪切力。由pva材料形成的磨光垫306具有约134mm的直径,其大于由常规材料形成的具有约67mm直径的典型磨光垫的直径。更大的磨光垫提高了性能并减少了在化学机械清洁中的磨光时间。此外,由pva材料形成的磨光垫306比由常规材料形成的典型磨光垫厚。垫载体314被设计成支撑大且厚的吸水磨光垫306而同时通过机械夹持机构和抽吸夹持机构防止磨光垫306下垂。
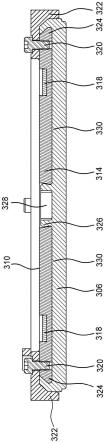
53.万向节基座310进一步包括在万向节基座310的周边边缘上的唇部分322。垫载体314包括在垫载体314的周边边缘上的锥形部分324,该锥形部分从垫载体314的底表面朝向面向万向节基座310的顶表面逐渐变窄,使得锥形部分324基本上平行于万向节基座310的唇部分322的内表面。万向节基座310的唇部分322和垫载体314的锥形部分324一起沿着磨光垫306的周边边缘机械地夹持磨光垫306。垫载体314在底表面上具有约128mm的直径和约4.2mm的厚度。在顶表面上的垫载体314的直径比垫载体314的直径小约4.6mm。
54.图4b和图4c是根据第一实施例的垫载体314的平面图和侧截面图。在图4c中,还示出了万向节基座310和磨光垫306的一部分。垫载体314包括中心狭槽326,杆328穿过中心狭槽326被推动到磨光垫306中。狭槽326为圆形,其直径为约15mm,并且从面向万向节基座310
的表面向面向磨光垫306的表面反向地逐渐变窄(即,面向万向节基座310的表面的直径大于在磨光垫306的基础表面处的直径)。杆328呈圆柱形,其直径略大于狭槽326的直径,使得杆328在插入到狭槽326中时被压缩。杆328、垫载体314和磨光垫306相互密封并且在其中产生与外部大气压力相比的内部较低压力区域。大气压力压在被杆328、垫载体314和磨光垫306包围的较低压力区域上并产生对磨光垫306的抽吸夹持力。万向节基座310和垫载体314可由塑料或聚合物形成,诸如聚醚醚酮(peek)。通过由万向节基座310的唇缘部分322和垫载体314的周边边缘组成的机械夹持机构和由杆328和磨光垫306组成的抽吸夹持机构,磨光垫306可被垫载体314安全地支撑。在图4b和图4c中,示出了一个圆形狭槽326和一个圆柱形杆328。然而,垫载体314可具有多个狭槽326,狭槽中的每一者接收一个杆328,以产生对磨光垫306的更大的抽吸夹持力。杆328可以是任何形状,并且狭槽具有与杆328的形状相匹配的形状,使得杆328和垫载体314在其中产生内部低压力。
55.图4d是根据第二实施例的垫载体314的侧截面图。在图4d中,还示出了万向节基座310和磨光垫306的一部分。垫载体314包括中心狭槽326,杆328穿过中心狭槽326被推动到磨光垫306中,如图4c所示的第一实施例中那样。在第二实施例中,与磨光垫306接触的背衬330设置在垫载体314的表面上。背衬330可由塑料形成并增加了磨光垫306的硬度,从而进一步防止了磨光垫306下垂。
56.图4e和图4f是根据第三实施例的磨光垫306的顶视图。在第三实施例中,磨光垫306具有形成在磨光垫306的面向垫载体314的表面上的凸起接触特征,并且垫载体314具有多个狭槽326,接触特征中的一者接合在狭槽中的每一者中。磨光垫306的凸起接触特征和垫载体314相互密封并且在其中产生与外部大气压力相比的内部较低压力区域,从而产生对磨光垫306的抽吸夹持力。在图4e中,凸起接触特征是多个柱332,并且柱332中的每一者接合在垫载体314的一个狭槽326中。在图4f中,接触特征包括接合在与柱334的形状相匹配的圆形狭槽326中的柱334和径向辐条336,每个辐条都接合在与径向辐条336的形状相匹配的矩形狭槽326中。
57.在本文描述的实施例中,垫载体支撑大且厚的吸水磨光垫(诸如由聚乙烯醇(pva)材料制成的磨光垫)而同时在化学机械清洁中通过机械夹持机构和抽吸夹持机构防止磨光垫下垂。由聚乙烯醇(pva)材料制成的磨光垫因机械强度和耐磨性而可为化学和机械抛光提供高剪切力。大尺寸磨光垫提供了提高的清洁性能。
58.尽管前述内容针对的是本公开内容的实施例,但是在不脱离本公开内容的基本范围的情况下可设想本公开内容的其他和进一步实施例,并且本公开内容的范围由所附权利要求书的范围确定。
59.附图标记列表
60.100 化学机械抛光(cmp)处理系统
61.105 第一部分
62.106 第二部分
63.110 cmp后清洁系统
64.112 竖直清洁模块
65.120 基板
66.124 第一机器人
67.130 系统装载站
68.140 计量站
69.142 lsp模块
70.150 第二机器人
71.160 系统控制器
72.161 可编程中央处理单元(cpu)
73.162 存储器
74.163 支持电路
75.170 干燥单元
76.180 基板搬运器
77.200 hpc模块
78.202 第一端
79.204 第二端
80.206 第一侧
81.208 第二侧
82.210 腔室
83.212 处理区域
84.214 盆
85.216 盖
86.218 第一侧面板
87.220 第一基板搬运器进出门
88.221 第二基板搬运器进出门
89.222 第二侧面板
90.224 开口
91.226 第三侧面板
92.228 维修进出面板开口
93.230 可旋转真空台
94.232 吸紧板
95.266 基板接收表面
96.270 机构
97.272 基板接触点
98.274 基板箍
99.280 垫调节站
100.282 调节刷
101.284 刷轴
102.286 喷射喷嘴
103.290 冲洗歧管
104.292 基板中心冲洗棒
105.294 基板喷射棒
106.296 刷冲洗件
107.300 垫载体定位臂
108.302 远端
109.304 垫载体组件
110.306 磨光垫
111.308 头部马达
112.310 万向节基座
113.312 球形轴承
114.314 垫载体
115.316 径向辐条
116.318 磁体
117.320 销
118.322 唇缘部分
119.324 锥形部分
120.326 矩形狭槽
121.328 杆
122.330 背衬
123.332 柱
124.334 柱。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。