1.本发明涉及一种用于给容器填充液态填料和用于以封闭盖、特别是王冠盖封闭容器的方法。
2.本发明涉及用于容器处理系统的方法,例如该容器处理系统可应用于饮料工业中的容器处理机中、特别是具有每小时超过1000容器的功率的容器处理机中、特别是具有每小时超过10000容器的功率的容器处理机中。本发明特别是涉及用于如下容器处理系统的方法,该容器处理系统包括用于给容器填充液态填料的所谓的填充机或填充器。本发明也涉及如下容器处理系统,其同时包括用于封闭填充的容器的封闭器的功能,且在此特别是构造用于以封闭盖、例如王冠盖封闭填充的容器。
背景技术:
3.所述类型的填充机具有多个处理站或填充位置,其也可以理解为填充站或填充位置。在填充机的每个填充站上设有具有填充阀或液体阀的填充件或填充机构,通过其输出开口使得液态填料输出到容器中。例如借助于所谓的“自由喷射填充”实现填料输出到容器中。
[0004]“自由喷射填充”或“自由喷射充填”在本发明的框架内理解为一种填充方法,其中,液态填料从液体阀以自由填充喷射或填料喷射的形式流向待填充的容器,其中,填料的流动未通过引导件、例如引导保护罩、旋流器、或短或长的填充管影响或改变。自由喷射填充可以不仅无压力地而且在压力下实现。在无压力的自由喷射填充的情况下,容器具有环境压力,其中,容器通常以其容器口部或开口不贴靠在填充件上,而是与填充件或设置的输出开口隔开间距。如果容器在无压力的自由喷射填充的情况下以其容器口部贴靠在填充件上,则气体路径在容器内部空间与环境之间建立连接,由此能实现无压力的填充。优选地,包含在容器中且通过流入容器中的饮料推挤的气体也通过该气体路径泄到环境中。
[0005]
如果自由喷射填充在与环境压力不同的压力下实现,则容器以其口部相对于填充件压紧且密封。在容器内部空间中的压力通过施加压缩气体或通过施加负压被调设到可相应于环境压力的或者与环境压力不同的压力。被调设的压力可以不仅大于环境压力而且小于环境压力。
[0006]
前述类型的封闭器通常同样具有多个处理站或处理位置,其也可以理解为封闭站或封闭位置。在封闭器的每个封闭站上设有包括封闭冲头的封闭机构或封闭工具,通过其将王冠盖挤压到容器口上且最后通过变形密封紧固。
[0007]
由现有技术、即de 10 2014 104 873 a1已经公知了一种用于饮料填充工艺的容器处理系统,其中,将含二氧化碳的饮料填充到经抽真空的容器、特别是瓶子中。在填充到抽真空的瓶子中时,填充过程闪电般以非常高的速度实现,由此将容器迅速卸载到环境压力和/或从填充位置迅速卸载和取下容器是不可能的,因为其必然将导致填料的过度泡沫化。该填充过程因此在该已知的方法中直接在填充位置与封闭过程组合。在此,封闭过程在关闭的气体空间中在瓶子上方且在大于二氧化碳饱和压力的压力下实现。在该已知的方法
中同样设计,待填充的容器在实际的抽真空之前以惰性的冲洗气体冲洗。
[0008]
不仅为了在冲洗阶段期间冲洗容器,而且为了在填充阶段之后导入压缩气体而在公知的方法中使用co2作为惰性气体。co2的使用在此不仅仅仅是昂贵的,确切地说,co2的使用也越来越集中于在政治和经济中增多的环境讨论。co2是全球碳循环的重要组成部分并且作为空气的自然组成部分是地球大气中的重要的温室气体:然而自工业化以来由于人类活动导致地球大气中的co2含量强烈地增加。所述增加导致增强温室效应,这又是当前全球变暖的原因。
技术实现要素:
[0009]
由此出发,本发明的任务在于,提出一种不仅用于给容器填充液态填料而且用于以封闭盖封闭容器的方法,其中,在很大程度上取消co2的使用。
[0010]
该任务通过根据独立权利要求1的特征所述的用于在处理站的填充和封闭机构上填充和封闭容器的方法来解决。从属权利要求在此涉及本发明的特别有利的进一步方案。
[0011]
根据一个主要的方面,本发明涉及一种用于在处理站的填充和封闭机构上填充和封闭容器的方法,其中,相应的容器的至少一个容器口部与填充和封闭机构的处理腔压力密封地连接。
[0012]
在此,在开始填充阶段之前,至少将在密封位置中布置在处理腔上的容器的内部空间在抽真空阶段中首先至少一次性抽真空到优选地0.05至0.15剩余压力的负压,并且然后在至少一个冲洗阶段中以蒸汽和/或含蒸汽的冲洗气体冲洗该内部空间,以使得在打开用于给容器填充液态填料的填充阀之前将容器中的冲洗气体压力至少提高到大气压力。此外在实际的填充阶段中打开填充阀,从而使液态填料流入到仍然在密封位置中布置在填充和封闭机构上的容器。
[0013]
在结束填充阶段之后,在处理站的填充和封闭机构上实施处理阶段,在该处理阶段中将处理腔特别是在相应的容器的容器口部上方借助于氮气预加载到如下压力,该压力处于包含在被填充的填料中的co2的co2饱和压力或者该co2饱和压力以上。
[0014]
在将处理腔的内部压力卸载到大气压力并且将相应的容器的容器口部与处理腔之间的压力密封的连接松开之前,将容器在所述处理阶段之后还在处理站的填充和封闭机构上通过在处理阶段期间调设的压力关系下压上封闭盖而封闭。
[0015]
也就是说,有利地在根据本发明的填充方法中不需要用于填充过程的附加的co2,因为取而代之使用氮气(以化学式n2表示)用于在填充容器之后施加给容器的头空间和/或处理腔。由此在填充时不释放环境有害的排放气体。n2可以在填充设备中从环境空气获得,在冲洗阶段期间使用的蒸汽可以通过使用可再生能源产生。
[0016]
此外,在根据本发明的方法中饮料在结束填充过程且释放容器口部之后以及在封闭过程之前通过氮气过压被保持在容器中,所述氮气过压优选地容易地处于包含在被填充的填料中的co2的饱和压力以上,其中,也可靠地阻止填料的泡沫化。氮气氛围附加地如此长时间地可靠地防止氧气进入到处理腔中,直到相应的容器直接在处理站上或中被封闭。由此提出一种用于给容器填充液态填料并且也用于以封闭盖封闭容器的方法,其中(在该方法中),co2的使用与现有技术相比显著地被减少或者甚至完全被取消。
[0017]
根据本发明的方法原则上利用的是,当通过根据本发明通过给处理腔施加氮气引
起的增大的环境压力来阻止填料的(过度)泡沫化时,则含二氧化碳的饮料可以在结束填充过程之后被快速地卸载,所述含二氧化碳的饮料通过真空或高的负压的作用以非常高的填充速度被填充到容器中。
[0018]
容器、特别是瓶子为此在抽真空阶段中被抽真空到优选地0.05-0.2bar然而或者0.1-0.4bar的负压。然后在冲洗阶段中特别是以在真空下的过度加热的蒸汽冲洗容器,以便尽可能完全去除剩余空气。
[0019]
通过在之前的抽真空阶段和冲洗阶段中产生的、容器中的非常纯的蒸汽氛围在填充阶段期间填充入液态填料时尽管由于快速流入引起强的涡流却仅仅产生非常有限的泡沫,具有低的溶解的氧气含量或者其他外来气体含量的饮料被填充到所述蒸汽氛围中。因此可以例如在纯蒸汽压力氛围中使首先作为泡沫从饮料逸出的二氧化碳又非常快速地溶解入饮料中。
[0020]
在打开填充阀之前不久,为此在冲洗阶段中将容器中的蒸汽压力增大到大气压力或大于大气压力的压力。如果在紧接着的填充阶段中在所述条件下打开填充阀,则在冷的液态填料流入时导致处于容器中的蒸汽的至少一部分容量迅速冷凝。由此实现迅速填充容器。当以大的涡流填充到所述氛围中时,则最初导致强的co2释放并且由此导致co2从液态转变到气态中。通过所述效应和由流入的冷的填料压缩的剩余气体氛围导致容器中的压力又增大。如果压力在所述填充阶段中增大超过co2饱和压力,则实现先前释放的co2的再碳化。也就是说,co2或二氧化碳随着越来越大的压力增加(直至饱和压力或者也大于饱和压力)又快速地溶解到饮料中。因此产生的泡沫形成保持在一定界限内。如果在此仅仅使用蒸汽,则可以借助于蒸汽冲洗方法在容器中产生实际无剩余空气(氧气)的氛围。
[0021]
在所述方法中,填料到瓶子中的流入速度也可以通过流量计和调节阀的组合被调节。
[0022]
优选地,特别是如果借助于流量计的容积测量对于迅速填充是过慢的,则将填料的需要的填充量定量配给到预收罐中并且迅速输出到瓶子中。当流量计由于高的填充速度不再能达到足够的测量精度时,则这是有利的。
[0023]
蒸汽、特别是过度加热的蒸汽作为冲洗介质在冲洗阶段中的使用具有附加的效应,即杀死对饮料有害的微生物。
[0024]
饮料或填料优选地通过填料罐和待填充的容器之间密封的连接借助于能切换的填充阀填充。在填料容器的气体空间中优选地被调设为如下压力,该压力相应于待填充的液态填料的co2饱和压力或者大于co2饱和压力。
[0025]
所述方法具有的优点是,基于填料罐和容器之间大的压力差使填充过程非常快速地进行。这导致短的填充时间并且由此导致明显更小尺寸的填充机。
[0026]
填充速度可以在需要时也通过布置在至容器的输入管路中的调节阀根据由流量计测定的体积流量被调节。
[0027]
在非碳化的静饮料的情况中,储存容器中的压力也可以是大气压力或者是略微大于大气压力的压力。
[0028]
优选地,在抽真空阶段期间和/或在冲洗阶段期间使用蒸汽或过渡加热的蒸汽作为冲洗气体。这具有的优点是,一方面可能在填充之前或在填充时杀死处于容器中的微生物。另一方面蒸汽或过度加热的蒸汽在填充期间迅速地冷凝,从而几乎实现真空填充。这导
致非常快速的填充过程。
[0029]
为此可以优选地也在冲洗阶段之后并且在填充阶段之前在容器中被调设为0.02至0.2、特别是0.05至0.1bar的过压。这也导致,在将饮料镇静时使容器或处理腔中的压力增大到包含在填料中的co2的饱和压力以上,从而饮料在镇静阶段中不被排除气体或者不被干扰地泡沫化。
[0030]
然而根据本发明在结束填充阶段之后在处理站的填充和封闭机构上实施处理阶段,在该处理阶段中将处理腔特别是在相应的容器的容器口部上方借助氮气n2施加并且由此预加载到如下压力,该压力相应于包含在被填充的填料中的co2的饱和压力或者处于该饱和压力以上。
[0031]
为了可以更进一步增大容器中的冷凝作用为此设置,填充和封闭机构的与蒸汽接触的构件由具有小的导热能力和/或热容的材料制造,从而冷凝作用几乎仅仅在容器中产生。
[0032]
根据一个有利的实施变体,所述方法可以在此设置,其中,将处理腔借助由氮气和大气空气构成的混合物调设到如下压力,该压力相应于包含在被填充的填料中的co2的饱和压力或者处于该饱和压力以上。
[0033]
根据一个有利的实施变体,所述方法可以在此设置,其中,将处理腔借助纯氮气调设到如下压力,该压力相应于包含在被填充的填料中的co2的饱和压力或者处于该饱和压力以上。
[0034]
根据一个另外的有利的实施变体,所述方法可以在此设置,其中,分别多次实施抽真空阶段和/或冲洗阶段,亦即通过抽真空阶段与冲洗阶段之间的交替的来回切换。
[0035]
根据又一个另外的有利的实施变体可以在此设置,在开始填充阶段之前将氮气掺入冲洗阶段的含蒸汽的冲洗气体、亦即优选地最后的冲洗阶段的含蒸汽的冲洗气体。
[0036]
根据又一个另外的有利的实施变体,所述方法可以在此设置,其中,根据在处理腔内部借助于至少一个压力传感器检测到的实际压力值来控制和/或调节至少抽真空阶段和/或冲洗阶段和/或填充阶段和/或处理阶段。由此抽真空阶段和/或冲洗阶段和/或处理阶段的过程步骤的持续时间、即特别是在抽真空阶段之间以蒸汽冲洗容器、在填充阶段开始之前不久给容器施加蒸汽直至大气压力以及在填充结束之后在处理阶段中给处理腔和容器的口部施加蒸汽,可以通过根据压力的切换被保持为尽可能短的。因此蒸汽处理时间可以根据压力被限制到最小值。通过根据压力的控制和/或调节也可以将吹入的蒸汽量和由此到容器中的能量输入以需要的最小程度减小。特别有利地,直接在填充阶段之后紧接着的方法步骤、即移开构造在滑动件中的填充管接头以及还在填充和封闭机构上实际封闭容器在此也可以在尽可能短的过程时间内进行。
[0037]
根据一个有利的实施变体可以在此设置,在接入至少一个压力传感器的情况下构成调节回路,借助于该调节回路根据检测到的实际压力值控制和/或调节至少抽真空阶段和/或冲洗阶段和/或处理阶段,其中,填充阀和/或第一至第五控制阀中至少之一设置为调节回路中的调节机构。
[0038]
根据一个另外的有利的实施变体可以在此设置,在所述方法中,抽真空阶段和/或冲洗阶段和/或处理阶段通过能预选择的压力特性曲线在接入调节回路的情况下控制和/或调节。
[0039]
根据一个另外的有利的实施变体可以在此设置,在调节回路中将由压力传感器检测到的实际压力值传送给机器控制装置并且与存储在那里额定压力值比较,并且基于该比较驱控作为调节机构的填充阀和/或第一至第五控制阀中至少之一。
[0040]
根据一个另外的有利的实施变体可以在此设置,对于抽真空阶段和/或冲洗阶段和/或处理阶段的相应的开始以及结束确定额定压力值,将该额定压力值与当前实施的抽真空阶段和/或冲洗阶段和/或处理阶段的相应的实际压力值比较,并且在达到额定压力值的情况下实施由相应当前实施的抽真空阶段和/或冲洗阶段和/或处理阶段到后置于当前实施的抽真空阶段和/或冲洗阶段和/或处理阶段中的直接切换。
[0041]
根据一个另外的有利的实施变体可以在此设置,在填充和封闭过程中根据压力直接在达到预确定的额定压力值之后从当前实施的阶段切换到后置于当前实施的阶段中,亦即根据压力传感器的求取的实际压力值。
[0042]
根据一个另外的有利的实施变体可以在此设置,在填充和封闭机构中被施加蒸汽的构件由具有小的导热能力和/或热容的材料制造。
[0043]
根据一个另外的有利的实施变体可以在此设置,容器在其密封的填充和封闭位态中借助于承载件相对于密封件被压到密封位置中,该密封件同心地包围用于液态填料的输出开口,其中,密封件布置在横向于竖直轴线能移动地接收在处理腔内部的滑动件上。
[0044]
根据一个另外的有利的实施变体可以在此设置,在滑动件中构造液体通道,该液体通道在中间连接填充阀的情况下通过填料管路能够与填料罐连接。
[0045]
根据一个另外的有利的实施变体可以在此设置,在滑动件中构造气体通道,该气体通道通过第一控制阀以及通过第一供给管路并且在中间连接第三控制阀的情况下能够与氮气源流体连接、通过第四控制阀能够与蒸汽源流体连接并且通过第五控制阀能够与真空源流体连接。
[0046]
根据一个另外的有利的实施变体可以在此设置,在处理腔中设置至少一个温度传感器用于检测在处理腔中存在的实际温度值,该实际温度值作为调节参量被一同在调节回路中考虑。
[0047]“容器”在本发明的意义中理解为任何容器、特别是瓶子、罐子、杯子等,其分别由金属、玻璃和/或塑料、优选地pet(聚对苯二甲酸乙二醇酯)构成。
[0048]
表述“基本上”或“大约”在本发明的意义中是指与相应准确的值 /-10%、优选地 /-5%的偏差和/或呈对于功能不重要的改变形式的偏差。
[0049]
本发明的进一步方案,优点和应用可能性也由实施例的下述说明并且由附图得出。在此,所有描述的和/或绘图示出的特征与其在权利要求或者所述权利要求的回引关系中的组合无关地单独地或者以任意的组合原则上是本发明的主题。权利要求的内容也是说明书的组成部分。
附图说明
[0050]
下面借助实施例的附图具体阐述本发明。附图中:
[0051]
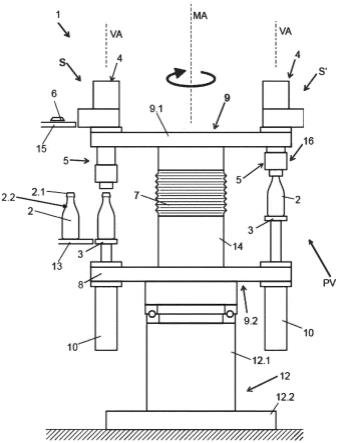
图1示出根据本发明的容器处理系统的一个优选的实施方式的粗略示意性的视图,
[0052]
图2示出填充和封闭机构的一个实施变体的实例,
[0053]
图3至图8对于根据图2的实施变体的填充和封闭过程示出填充和封闭过程的不同阶段,和
[0054]
图9极大简化地并且粗略示意性地绘出用于借助单独地示出的处理站产生封闭过程的机制。
[0055]
在附图中对于本发明的相同的或相同作用的元件使用相同的附图标记。此外,为了简明在各个附图中仅仅示出用于描述相应图所需的附图标记。
具体实施方式
[0056]
用于填充和封闭容器2的在附图中通常以1标出的容器处理系统在此设置用于实施根据本发明的方法并且在根据图1示出的实例中构造为回转的结构方式的容器处理系统或机器,其中,所述机器在此也理解为容器处理机并且特别是填充和封闭机1,即构造用于填充和封闭容器2。
[0057]
构造为回转的填充和封闭机的容器处理系统1在此具有围绕竖直中心轴线ma布置的多个处理站s,s
‘
,所述多个处理站分别沿着相应的竖直轴线va延伸并且设置在由马达回转地驱动的机器转盘9的圆周上。出于简明的原因,在图1中相应地示出所述多个处理站s,s
‘
中的仅仅两个处理站。然而本发明不局限于这样的实施方式。
[0058]
在容器处理系统1的每个处理站s,s
‘
上,在机器转盘9的转盘上部9.1上分别设置至少一个填充和封闭机构4,其分别基本上同样在沿着相应的处理站s,s
‘
的竖直轴va的方向上延伸。
[0059]
构造为回转的填充和封闭机器的容器处理系统1还包括沿竖直方向设置在转盘上部9.1下方的转盘下部9.2,其具有承载环8,在该承载环的圆周上设有多个用于承载地接收容器2的承载件3。每个处理站s,s
‘
在此配置有承载件3,从而每个要处理的容器2在处理站s中的处理期间支承在配置给该相应的处理站s,s
‘
的承载件3上,特别是站立在承载件3上。
[0060]
构造为填充和封闭机器的容器处理系统1特别是设置和设计为用于给容器2填充液态填料以及用于然后以王冠盖形式构造的封闭盖6封闭容器2。所述填充和封闭机器1因此至少用于封闭容器2的功能范围、亦即用于封闭功能,例如王冠盖器。然而容器以王冠盖封闭是非强制的。容器可以在执行对于本领域技术人员显而易见的需要的匹配之后也以螺旋盖或密封盖被封闭。
[0061]
通常在所述填充和封闭机器1中设置在附图中未具体示出且沿运输方向前置的容器供给机构。例如也可以前置有(同样未在附图中示出的)另外的处理机器,所述处理机器设置用于容器2的另外的、在前的处理步骤,例如用于容器的清洁、消毒、烘干或检查或者诸如此类。
[0062]
容器2通常通过运输机构、例如运输带输送给填充和封闭机器1且在此在输入侧由仅仅部分地且隐含地在图1中给出的运输件13、例如进入星转交给实际的填充和封闭机器1。在以下文中还将进一步阐明的方式和方法经过填充和封闭机器1之后、亦即在填充和封闭各个容器2之后,将以封闭盖6、特别是王冠盖封闭的容器2在填充和封闭机器1的输出侧由另一未示出的且沿运输方向跟随填充和封闭机器1设置的运输件、例如输出星接收并且以对于本领域内技术人员已知的方式和方法运走。
[0063]
此外,用于供给液态填料的填料供给装置(在图2或3中示出)以及用于供给构造为
王冠盖的封闭盖6的封闭盖供给装置15与所述构造为填充和封闭机器的容器处理系统1、特别是与在每个处理站s,s
‘
上设置的填充和封闭机构4连接。出于清晰性的原因,用于供给各个王冠盖6的封闭盖供给装置15在图1中仅仅示意性地和部分地标明,该供给可以通过已知的方式和方法实现。封闭盖供给装置15在此构造用于给填充和封闭机构4对于每个待填充且待封闭的容器2供给自己的封闭盖6。
[0064]
在图1中示例性示出的构造为填充和封闭机器的容器处理系统1的实施变体中,机器转盘9分别通过沿着竖直的机器轴ma延伸的中心柱14旋转地支承在机座12上,其中,机座12在此例如具有撑脚12.1和与撑脚12.1连接的、支承在地面上的机器基础12.2。
[0065]
在构造为填充和封闭机器的容器处理系统1的示出的实施方式中,在中心柱14的区域中布置高度调节机构7,通过该高度调节机构可以使转盘上部9.1和转盘下部9.2沿竖直方向沿着中心轴线ma相对彼此运动,以便可以使容器处理系统1匹配于不同的容器样式、特别是容器2不同的高度。在此,借助于高度调节机构7的高度调节或者机器转盘9与不同容器高度的匹配可以通过对于本领域内技术人员完全已知的方式实现。
[0066]
每个设置在相应的处理站s,s
‘
上的填充和封闭机构4具有至少一个填充阀4.1(也参见图2和3)以及至少一个沿竖直方向设置在要填充和要封闭的容器2上方的封闭件5,其中,封闭件5特别是在容器2的封闭过程中承担封闭冲头的功能。
[0067]
因此,填充和封闭机构4也可以理解为组合的填充和封闭工具、特别是组合工具,其不仅具有对于填充所需要的工具组件而且也具有对于容器2的封闭所需要的工具组件。填充阀4.1和封闭件5特别是构造为集成在填充和封闭机构4中的组件,所述填充阀和封闭件分别构成用于填充的工具组件或者用于封闭的工具组件。构造为这种组合工具的填充和封闭机构4的可能的实施方式例如在图2和3中粗略地示出。
[0068]
在此可以设置,承载件3和封闭件5构造为用于相互间施加沿处理站s,s
‘
的竖直轴va的方向定向的、受控的相对运动,亦即以如下方式:承载件3和封闭件5基于受控的相对运动从初始位置起占据另外的相对位置、即至少一个填充和封闭位置pv。
[0069]
在图1的示例中示出分别用于处理站s的初始位置,且在相应的处理站s
‘
上示出填充和封闭位置pv。特别是,容器处理系统1设立为用于在相应的处理站s,s
‘
上不仅填充而且封闭容器2。特别是在此在填充和封闭位置pv中执行至少一个抽真空阶段和/或冲洗阶段和/或填充阶段和/或时间上在填充阶段之后的处理阶段,以及在封闭过程中还在处理站s,s
‘
上以封闭盖6封闭容器2。特别是容器在抽真空阶段和冲洗阶段、实际的填充阶段以及借助于封闭盖6的封闭或密封期间不必竖直运动,因为相应的容器2可以对于所有上述子工艺步骤在填充和封闭位置pv中停留在处理站s上。
[0070]
图2示例性地示出使用在所述容器处理系统1中的填充和封闭机构4的一个可能的实施变体,其中,待处理的、特别是待填充的且待封闭的容器2为此可以这样从填充和封闭机构4的自由的且能易于到达的下侧进入到所述填充和封闭机构中,以使得至少容器2的容器口部2.1可以布置在处理腔上,然而特别有利地布置在处理腔17内。处理腔17可以相对于外部大气被密封。至少容器口部2.1在整个填充和封闭过程期间,特别是在抽真空阶段和/或冲洗阶段和/或填充阶段和/或处理阶段期间停留在处理腔17内。
[0071]
特别是,容器2在此在其在图2中示出的密封的填充和封闭位态pv中借助于承载件3优选地在密封位置中压抵密封件33,该密封件(密封元件)同心地包围用于液态填料的输
出开口37。在此,密封件33布置在能横向于竖直轴线va被控制和/或被调节移动地接收在处理腔17内的滑动件21。
[0072]
此外,滑动件21在此可以具有液体通道23,该液体通道在中间连接填充阀4.1的情况下通过填料管路24与填料罐25连接。在此可以给填料管路24配置流量计24.1,借助于该流量计能够检测通过填料管路24从填料罐25供应给液体通道23的液态填料的体积流量、即每单位时间的填料量。
[0073]
除了液体通道23以外,滑动件21也可以具有气体通道27,该气体通道通过第一控制阀sv1以及通过第一供给管路29.1且在中间连接第三控制阀sv3的情况下与氮气源30流体连接、通过第四控制阀sv4与蒸汽源34流体连接以及通过第五控制阀sv5与真空源28流体连接。
[0074]
此外,处理腔17能够通过第二供给管路29.2并且在中间连接第二接控制阀sv2或第三控制阀sv3的情况下与氮气源30流体连接。n2源在此可以是氮气产生装置,所述氮气产生装置构造用于产生具有环境空气的100%体积含量的纯氮气。
[0075]
在此,能密封的处理腔17、优选地滑动件21的液体通道23可以具有至少一个压力传感器ds用于检测在处理腔17中存在的实际压力值。
[0076]
为此,至少一个压力传感器ds连同填充阀4.1以及控制阀sv1
…
sv5中至少之一构成调节回路rk、特别是压力调节回路,借助于调节回路根据检测到的实际压力值能够控制和/或调节至少抽真空阶段和/或冲洗阶段和/或处理阶段,其中,填充阀4.1和/或控制阀sv1
…
sv5中至少之一设置为调节回路rk、特别是压力调节回路中的调节机构。
[0077]
在此,能密封的处理腔17也可以具有至少一个温度传感器ts用于检测在处理腔17中存在的实际温度值。例如至少一个温度传感器布置在滑动件21的液体通道23中。在此,借助于温度传感器ts检测到的实际温度值可以作为调节参量被一同纳入压力调节回路的调节。在此在考虑、特别是组合检测到的实际压力值以及检测到的实际温度值的情况下可以补偿容器2中的冷却和冷凝效果。
[0078]
滑动件21可以借助于驱动器40对于填充阶段这样向前推进到封闭件5下方的位置中、即基本上向前推进到沿着竖直轴线va的位置中,以使得滑动件21的液体通道23和气体通道27在侧面接触配合地并且在密封位置中贴靠在填充阀4.1以及第一控制阀sv1上。
[0079]
此外,滑动件21可以借助于驱动器40对于封闭过程从中间的位置沿着竖直轴线va在侧面这样回拉(即在水平地远离填充阀4.1指向的方向上运动),以使得封闭件5能够向下朝向在密封位置中布置在填充和封闭机构4上的容器2的方向自由地移动。
[0080]
为了更好理解以封闭盖6对被填充的容器2进行的封闭过程或封闭阶段,在图9中再次示意性地示出承载件3与能竖直地沿着竖直轴线va运动的封闭件5之间的相互作用或作用机制。
[0081]
通过承载件3与封闭件5之间的相对彼此的受控的相对运动(在图9中以虚线描绘的双箭头标明)受控地改变承载件3与封闭件5之间的间距。
[0082]
被填充的并且现在要封闭的容器2在封闭阶段期间布置在承载件3和封闭件5之间,其中,至少封闭件5的位置在实施不同的依次相继的功能步骤“密封”、“填充”和“封闭”期间也相对于容器2改变。
[0083]
通过受控的相对运动,在王冠盖6与容器2之间产生在封闭过程期间需要的压紧
力。在此,容器2连同定位在容器口部2.1上的王冠盖6夹紧在承载件3和封闭件5之间,其中,封闭件5传输或施加由上部作用到王冠盖6并且由此作用到容器2上的封闭力fy。容器2通过承载件3以反作用于封闭力fy的、向上指向的保持力fy
‘
保持,其中,封闭力fy和保持力fy
‘
相互配合引起王冠盖6压紧到容器口部2.1上并且引起容器2的紧接着的密封封闭。
[0084]
如由图9得知,承载件3和/或封闭件5设计为可升降运动,并且因此可以经过沿着竖直轴va的运动路径。为了开始到封闭件5上的竖直运动,该封闭件可以在自由的、背离处理腔17的、端侧的区域中与驱动机构5.1配合。此外,承载件3和/或封闭件5产生沿着竖直轴va取向的力,亦即垂直向上作用的保持力fy
‘
或垂直向下作用的封闭力fy。
[0085]
王冠盖边缘的对于利用王冠盖6最终密封封闭所述容器所需的塑性变形通过将王冠盖6至少部分地沉入拉环装置11的拉环11.1中实现。
[0086]
为此,例如拉环11.1可以设计为固定不动且容器可相对于拉环11.1向上运动。替换地,拉环11.1可以设计为沿竖直方向可运动,由此该拉环例如沿着竖直轴va相对于不可运动的王冠盖6或相对于容器运动。拉环11.1的可能的运动在图10中通过具有实线的双箭头标明。替换地,不仅拉环11.1而且承载件3和封闭件5运动。
[0087]
在此,封闭件5特别是可以构造为磁性挺杆,在封闭盖6借助于拉环装置11固定在相应的容器2上之前,该磁性挺杆在其朝向承载件3的自由端部上磁性保持分别要压紧到容器口部2.1上的封闭盖6、特别是王冠盖。替换地,封闭件5也可以通过负压的力作用保持封闭盖6。
[0088]
在填料罐25(图2)中,在填充运行期间优选地构成上气体空间25.1和下液体空间25.2。如果容器处理系统1在此用于压力填充液态填料到容器2中,那么上气体空间25.1被施加处于填充压力下的惰性气体(二氧化碳气体)。该惰性气体的压力是受控或受调节的。填料通过未具体示出的供给管路供应给填料罐25。
[0089]
此外,在输出开口37下方设置能受控和/或受调节操作的颈部密封装置26,借助于该颈部密封装置,相应的容器2在其容器口部2.1下方在其相应的容器颈部2.2的区域中是可密封的,且由此特别是也将处理腔17在密封的填充和封闭位置pv相对于环境密封。因为容器口部2.1由此在密封的填充和封闭位置pv中布置在处理腔17上或者至少部分地布置在处理腔内,所以这也可以理解为容器2的密封。
[0090]
为此在根据本发明的用于在处理站s,s
‘
的填充和封闭机构4上填充和封闭容器2的方法中,在开始填充阶段之前可以至少将在填充和封闭机构4的处理腔17的密封位置中布置的容器2的内部空间在抽真空阶段中首先至少一次性抽真空到优选地0.05至0.15剩余压力的负压,并且然后在冲洗阶段中以蒸汽和/或含蒸汽的冲洗气体这样冲洗该内部空间,以使得在打开用于给容器2填充液态填料的填充阀4.1之前将容器2中的冲洗气体压力至少提高、即上升到大气压力。
[0091]
然后在实际的填充阶段中打开填充阀4.1,从而液态填料流入仍然在密封位置中设置在填充和封闭机构4上的容器2中。
[0092]
在结束填充阶段之后,还在处理站s的填充和封闭机构4上实施一个另外的处理阶段,在所述另外的处理阶段期间将处理腔17特别是在容器2的容器口部2.1上方借助于氮气(n2)预加载或被施加直至如下压力,该压力相应于包含在填料中的co2的饱和压力或者处于该饱和压力以上。处理阶段由此特别是设置为时间上在填充阶段之后。
[0093]
也可以设置,给处理腔17施加由氮气和大气空气构成的混合物直至如下压力,该压力相应于包含在填料中的co2的饱和压力或者处于该饱和压力以上。
[0094]
再之后,在处理腔17的内部压力卸载到大气压力之前,又将容器2在处理阶段之后还在处理站s的填充和封闭机构4上通过在处理阶段期间调设的压力情况下压上封闭盖6而封闭。
[0095]
有利地,在此根据压力传感器ds的检测的实际压力值可以控制和/或调节至少抽真空阶段和/或冲洗阶段和/或处理阶段。
[0096]
为此,所述至少一个压力传感器ds连同填充阀4.1以及所述控制阀sv1
…
sv5中至少之一构成调节回路rk、特别是压力调节回路,借助于该调节回路,根据检测到的实际压力值能够控制和/或调节至少抽真空阶段和/或冲洗阶段和/或处理阶段,其中,填充阀4.1和/或所述控制阀sv1
…
sv5中至少之一设置为调节回路rk、特别是压力调节回路中的调节机构。
[0097]
根据一个有利的实施变型在此设置,容器处理系统1设计为用于通过可预选择的压力特性曲线在接入调节回路rk的情况下控制和/或调节抽真空阶段和/或冲洗阶段和/或处理阶段。
[0098]
优选地,对于调节回路rk,将由压力传感器ds检测的实际压力值传送给机器控制器且与存储在那里的额定压力值比较,并且基于该比较驱控作为调节机构的填充阀4.1和/或所述控制阀sv1
…
sv5中至少之一。压力传感器ds在此对于调节回路rk提供调节参量的调节参数。
[0099]
特别是在此可以设置,对于抽真空阶段和/或冲洗阶段和/或处理阶段的相应的开始以及结束确定额定压力值,将该额定压力值与当前实施的抽真空阶段和/或冲洗阶段和/或处理阶段的相应的实际压力值比较,并且在达到额定压力值的情况下实施由相应当前实施的抽真空阶段和/或冲洗阶段和/或处理阶段到后置于当前实施的抽真空阶段和/或冲洗阶段和/或处理阶段中的直接切换。
[0100]
在此特别是可以设置,多次实施抽真空阶段和/或冲洗阶段,亦即例如通过抽真空阶段与冲洗阶段之间的交替的来回切换。特别是可以在此设置,将氮气掺入含蒸汽的冲洗气体中。有利地,在此将氮气掺入在开始填充阶段之前的最后的、即最末的冲洗过程的冲洗气体。
[0101]
由此确保,在填充和封闭过程中根据压力直接在达到预定的额定压力值之后由当前实施的阶段切换到后置于当前实施的阶段,确切地说根据求取的实际压力值切换。
[0102]
更详细地,该方法例如以在图2中示出的填充和封闭机构4如下进行:
[0103]
如由图3清晰可见,首先使封闭件5为了例如磁性接收封闭盖6而移动到其下位置中。
[0104]
滑动件21为此处于其拉回的位置,在该位置可以使封闭件5能轴向自由运动地沿着竖直轴va向下越过输出开口37推出,以便由此接收封闭盖6,亦即由密封盖供给装置15。填充阀4.1以及全部控制阀sv1
…
sv5在此关闭。封闭盖6在此可以特别是磁性保持在封闭件5上。
[0105]
不言而喻,用于以与王冠盖(参见上文)不同的介质封闭容器的过程不同于已示出的过程,然而这不到导致脱离本发明的保护范围。
[0106]
封闭盖6由此在紧接着还将进一步描述的蒸汽处理中在封闭过程之前和期间被消毒。
[0107]
紧接着封闭件5连同保持在其上的封闭盖6移动到其升高的位置中。紧接着使滑动件21移动到封闭件5下方接触锁合到填充阀4.1以及第一控制阀sv1上。此外,紧接着容器2在承载件3上在中间定位在填充和封闭机构4下面并且且通过承载件3的升高到达与填充和封闭机构4的处理腔17、特别是滑动件21的密封位置中(参见图4)。
[0108]
紧接着给颈部密封装置26施加压力,从而实现容器2在其容器颈部2.2的区域中相对于环境的密封(参见图5)。随后,在本实施例中,使容器2通过在抽真空阶段中打开第一和第五控制阀sv1,sv5抽真空到作为额定压力值的优选0.05至0.15bar的值。实际压力值的求取在此借助于压力传感器ds实现,该压力传感器将实际压力值提供给调节回路rk。
[0109]
紧接着在仍然打开的第一控制阀sv1的情况下关闭第五控制阀sv5且在此同时或几乎同时短时打开第四控制阀sv4以开始冲洗阶段,亦即通过调节回路rk压力控制地进行,直至在容器2中实现压力升高到至少大气压力,从而利用来自蒸汽管路34的蒸汽冲洗容器。所述过程步骤如此长时间地重复,直到在容器2的内部空间内达到期望的氧气减少。也就是说,冲洗和/或抽真空阶段的开始在此根据由压力传感器ds求取的实际压力值优选地压力控制和/或调节地进行。在该处理阶段结束时,容器优选地完全被填充蒸汽。
[0110]
如由图6可得知,现在为了开始填充阶段,关闭第一控制阀sv1和第四控制阀sv4且打开填充阀4.1,以便给容器2供给填料。在结束填充过程之后,又关闭填充阀4.1,其中,通过体积的流量计24.1求取供给的填料的量。然而取而代之地,产品也可以从配量空间冲击式供给。在这种情况中,体积测量在供给填料到配量空间中时进行并且不是在填充件4中进行。
[0111]
在关闭填充阀4.1之后开始镇静阶段,在所述镇静阶段中将饮料镇静并且使容器2中的压力上升到co2饱和压力以上。
[0112]
为了在填充阶段之后借助氮气(n2)对处理腔17进行预加载,将第二控制阀sv2打开用于给处理腔17施加来自n2源30的氮气,直到调设为如下压力,该压力处于包含在填料中的co2的饱和压力或者该饱和压力以上。优选地,处理阶段根据由压力传感器ds求取的实际压力值压力控制和/或调节地进行。此外,为此打开第一和第三控制阀sv1,sv3,从而进行容器2和处理腔17之间的压力补偿。还在滑动件21又被推回之前,在此关闭第三控制阀sv3,而第一和第二控制阀sv1,sv2仍然保持打开(参见图7)。
[0113]
然后使第二控制阀sv2也在仍然还打开第一控制阀sv1的情况下关闭,并且封闭件5连同保持在其上的封闭盖6放置到容器口部2.1上,并且使所述封闭盖此外如上述结合图9阐明的工作方法那样首先以需要的力压到容器2上,并且然后通过封闭盖6的边缘的塑性变形与容器密封地连接。
[0114]
最后在仍然打开的第一控制阀sv1的情况下将容器2卸载并且向下通过承载件3下降(参见图8)。
[0115]
本发明在前面以实施例进行了描述。不言而喻,大量变化或修改是可能的,而不脱离本发明的通过权利要求限定的保护范围。权利要求的内容被声明为说明书的内容。
[0116]
附图标记列表
[0117]1ꢀꢀꢀꢀꢀ
容器处理装置
[0118]2ꢀꢀꢀꢀꢀ
容器
[0119]
2.1
ꢀꢀꢀ
容器口部
[0120]
2.2
ꢀꢀꢀ
容器颈部
[0121]3ꢀꢀꢀꢀꢀ
承载件
[0122]4ꢀꢀꢀꢀꢀ
填充和封闭机构
[0123]
4.1
ꢀꢀꢀ
填充阀
[0124]5ꢀꢀꢀꢀꢀ
封闭件
[0125]6ꢀꢀꢀꢀꢀ
封闭盖
[0126]7ꢀꢀꢀꢀꢀ
高度调节机构
[0127]8ꢀꢀꢀꢀꢀ
承载环
[0128]9ꢀꢀꢀꢀꢀ
机器转盘
[0129]
9.1
ꢀꢀꢀ
转盘上部
[0130]
9.2
ꢀꢀꢀ
转盘下部
[0131]
11
ꢀꢀꢀꢀ
拉环装置
[0132]
11.1
ꢀꢀ
拉环
[0133]
12
ꢀꢀꢀꢀ
机座
[0134]
12.1
ꢀꢀ
撑脚
[0135]
12.2
ꢀꢀ
机器基础
[0136]
13
ꢀꢀꢀꢀꢀ
运输件
[0137]
14
ꢀꢀꢀꢀꢀ
中心柱
[0138]
15
ꢀꢀꢀꢀꢀ
封闭盖供给装置
[0139]
17
ꢀꢀꢀꢀꢀ
处理腔
[0140]
21
ꢀꢀꢀꢀꢀ
滑动件
[0141]
23
ꢀꢀꢀꢀꢀ
液体通道
[0142]
24
ꢀꢀꢀꢀꢀ
填料管路
[0143]
24.1
ꢀꢀꢀ
流量计
[0144]
25
ꢀꢀꢀꢀꢀ
填料罐
[0145]
25.1
ꢀꢀꢀ
气体空间
[0146]
25.2
ꢀꢀꢀ
气体空间
[0147]
26
ꢀꢀꢀꢀꢀ
颈部密封装置
[0148]
27
ꢀꢀꢀꢀꢀ
气体通道
[0149]
28
ꢀꢀꢀꢀꢀ
真空源
[0150]
29.1
ꢀꢀꢀ
供给管路
[0151]
29.2
ꢀꢀꢀ
供给管路
[0152]
30
ꢀꢀꢀꢀꢀ
氮气源
[0153]
33
ꢀꢀꢀꢀꢀ
密封件
[0154]
34
ꢀꢀꢀꢀꢀ
蒸汽源
[0155]
37
ꢀꢀꢀꢀꢀ
输出开口
[0156]
fy
ꢀꢀꢀꢀꢀ
封闭力
[0157]
fy
‘ꢀꢀꢀ
保持力
[0158]
ds
ꢀꢀꢀꢀꢀ
压力传感器
[0159]
ts
ꢀꢀꢀꢀꢀ
温度传感器
[0160]
ma
ꢀꢀꢀꢀꢀ
中心轴线
[0161]
pv
ꢀꢀꢀꢀꢀ
填充和封闭位态
[0162]
rk
ꢀꢀꢀꢀ
调节回路
[0163]
va
ꢀꢀꢀꢀ
竖直轴线
[0164]sꢀꢀꢀꢀꢀ
处理站
[0165]
sv1
…
sv5 第一至第五控制阀。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
