1.本发明主要涉及一种用于控制飞机的方向舵和制动踏板组件。
背景技术:
2.通常,有人驾驶的飞机具有某些控制表面,包括水平安定面或副翼,以及垂直安定面或方向舵以控制飞机在飞行过程中的运动。这些控制表面还用于在飞行过程中配平(trim)或稳定飞机。此外,与汽车一样,飞机也包括制动系统以便在地面上时控制飞机的运动。一般地,这些制动和控制表面,包括方向舵,由飞行员操作的各种机械连杆和电缆或者液压或机电致动器操作,并允许飞行员控制飞机的飞行路径。这些机械连接和电缆或电气连接通常在驾驶舱下方从起落架和控制表面的位置延伸到飞机驾驶舱。上述方向舵和制动系统通常由位于驾驶舱仪表板下方的踏板操作。
3.下面详述的本发明的实施例代表了对关于飞机控制系统的现有技术的改进。本发明的这些和其他优点以及附加的创造性特征将从本文提供的对本发明的描述中显而易见。
技术实现要素:
4.在一个方案中,本发明的实施例提供了一种用于飞机的方向舵和制动踏板组件。所述组件包括舵臂组件,其具有第一舵臂,其中第一上臂部联接至第一下臂部。所述舵臂组件还包括第二舵臂,其中第二上臂部联接至第二下臂部。所述舵臂组件在所述第一上臂部和所述第一下臂部的交叉处以及在所述第二上臂部和所述第二下臂部的交叉处被装配至梁。所述第一舵臂和所述第二舵臂构造为在所述交叉处围绕所述梁旋转。所述第一舵臂和所述第二舵臂的旋转构造为调整用于控制所述飞机的偏航轴的那些控制表面。制动踏板在附接点处附接至所述第一下臂部和所述第二下臂部中的至少一个的端部。所述制动踏板在所述附接点处的旋转操作所述飞机的机轮制动器。旋转传感器在所述附接点处被装配至所述制动踏板和下臂部二者。所述旋转传感器构造为确定所述制动踏板旋转的程度。
5.在特定的实施例中,所述旋转传感器是固定连杆旋转传感器,其具有:传感器外壳,其在所述附接点处固定到所述下臂部;以及输入操纵杆,其联接至所述制动踏板并被联接至传感器输入轴上,使得所述制动踏板的旋转引起所述输入操纵杆相对于所述传感器外壳旋转。
6.在替代实施例中,所述旋转传感器是具有传感器外壳的偏移传感器(offset-sensor)旋转传感器,传感器外壳具有附接的扇形齿轮。所述传感器外壳固定到所述制动踏板。配对齿轮固定到所述下臂部。所述配对齿轮啮合扇形齿轮,使得所述制动踏板的旋转引起所述配对齿轮沿所述扇形齿轮行进一段距离,其中所述距离与所述制动踏板旋转的程度成正比。
7.在又一替代实施例中,所述旋转传感器是带有传感器的轴上(on-axis)旋转传感器,该传感器具有在所述附接点处固定到所述下臂部的输入齿轮和惰轮。内部扇形齿轮固定到所述制动踏板。所述惰轮布置在所述输入齿轮和所述内部扇形齿轮之间,并在第一侧
与所述输入齿轮啮合,在与所述第一侧相反的第二侧与所述内部扇形齿轮啮合。所述制动踏板的旋转引起所述内部扇形齿轮沿所述惰轮和所述输入齿轮行进一段距离,其中所述距离与所述制动踏板旋转的程度成正比。
8.在某些实施例中,方向舵和制动踏板组件包括外壳,所述外壳构造为容纳配平机构、双臂曲柄、对中机构、负荷传感组件和阻尼器组件。在更特定的实施例中,外壳包括用于将所述方向舵和制动踏板组件附接至驾驶舱地板、驾驶舱舱壁或附接至驾驶舱仪表板正下方的装置。
9.前述制动踏板可以由附接至所述制动踏板的一个以上的弹簧偏置到正常位置,并且还可以具有联接至所述旋转传感器的第三弹簧。所述第三弹簧构造为在所述一个以上的弹簧失效的情况下将所述制动踏板偏置到所述正常位置。
10.在另一个实施例中,方向舵和制动踏板组件还包括由电机操作的配平机构。所述配平机构可以构造为控制所述舵臂组件的中立位置,从而控制用于配平所述飞机的所述控制表面。如在本技术中使用的,舵臂组件的“中立位置”是指制动踏板的这样的位置:其中没有控制表面受到踏板组件的飞行员操作的影响或控制。该中立位置通常也是制动踏板的起始位置,在该起始位置,没有力或压力被施加在任一制动踏板上。所述配平机构还包括第一蜗杆,所述第一蜗杆构造为同步旋转以驱动第一蜗轮,其中,所述第一蜗轮的运动调整了用于配平所述飞机的所述控制表面。在更特定的实施例中,所述配平机构具有平行于所述第一蜗杆的第二备用(redundant)蜗杆以及平行于所述第一蜗轮的第二备用蜗轮。所述第二蜗杆的运动调整了用于配平所述飞机的所述控制表面。
11.方向舵和制动踏板组件还可以包括对中机构,其构造为将所述第一舵臂和第二舵臂以及附接的制动踏板返回到由所述配平机构确定的中立位置。对中机构的一些实施例具有将所述第一舵臂和所述第二舵臂以及附接的制动踏板偏置到所述中立位置的一个以上的弹簧。一些实施例包括偏置对中机构的配平机构,因此将所述第一舵臂和所述第二舵臂以及附接的制动踏板偏置到偏移中立位置。
12.方向舵和制动踏板组件的实施例包括双臂曲柄,其构造为围绕定心毂轴旋转。所述双臂曲柄具有在所述定心毂轴的第一侧上的第一端以及在所述定心毂轴的与所述第一侧相反的第二侧上的第二端。所述第一端能够操作地联接至所述第一上臂部,并且所述第二端能够操作地联接至所述第二上臂部。所述双臂曲柄操作使得当所述第一舵臂在第一方向上旋转时,所述第二舵臂以与所述第一舵臂相同的角度,但在与所述第一方向相反的第二方向上旋转。
13.方向舵和制动踏板组件的实施例还包括负荷传感组件,其具有一个以上的传感器以感测经由制动踏板由所述舵臂组件的操作产生的力。此外,在一些实施例中,负荷传感组件包括负荷传感换能器(transducer)。
14.在本发明的一些实施例中,制动踏板组件包括制动踏板、旋转传感器的一部分以及具有传感器线和连接器的制动传感器,使得通过连接或断开所述传感器线和所述连接器,整个制动踏板组件能够附接至所述下臂部或从所述下臂部移除。方向舵和制动踏板组件还可以包括阻尼器组件,其构造为在将制动踏板返回到中立位置时防止所述制动踏板的过冲。
15.方向舵和制动踏板组件的实施例还包括互连u形夹,其用于将所述方向舵和制动
踏板组件连接至相邻的第二方向舵和制动踏板组件。所述互连u形夹操作使得所述方向舵和制动踏板组件的所述第一舵臂或所述第二舵臂的旋转引起所述第二方向舵和制动踏板组件上的对应舵臂的相同旋转。舵臂组件可以被装配至平移块,所述平移块构造为沿着引导路径移动,从而允许所述第一舵臂和所述第二舵臂调整所述制动踏板的位置的调整。此外,平移块的运动经由手轮、电机或释放闩锁来实现。
16.在另一方案中,本发明的实施例提供了一种用于飞机的方向舵和制动踏板组件。方向舵和制动踏板组件具有舵臂组件,其具有第一舵臂,其中第一上臂部联接至第一下臂部,并且具有第二舵臂,其中第二上臂部联接至第二下臂部。所述舵臂组件在所述第一上臂部和所述第一下臂部的交叉处以及在所述第二上臂部和所述第二下臂部的交叉处被装配至梁。所述第一舵臂和所述第二舵臂构造为在所述交叉处围绕所述梁旋转。所述第一舵臂和第二舵臂的旋转构造为调整用于控制所述飞机的偏航轴的那些控制表面。双臂曲柄构造为围绕定心毂轴旋转。所述双臂曲柄具有位于所述定心毂轴的第一侧的第一端和位于所述定心毂轴的与所述第一侧相反的第二侧的第二端。所述第一端能够操作地联接至第一上臂部,并且所述第二端能够操作地联接至所述第二上臂部。所述双臂曲柄操作使得当所述第一舵臂在第一方向上旋转时,所述第二舵臂以与所述第一舵臂相同的度数,但在与所述第一方向相反的第二方向上旋转。所述双臂曲柄进一步构造为在所述舵臂组件调整附接至所述第一下臂部和所述第二下臂部中的至少一个的端部的制动踏板的位置的调整过程中保持固定的位置。
17.在某些实施例中,方向舵和制动踏板组件还包括互连u形夹,其用于将所述方向舵和制动踏板组件连接至相邻的第二方向舵和制动踏板组件。所述互连u形夹操作使得所述方向舵和制动踏板组件的所述第一舵臂或所述第二舵臂的旋转引起所述第二方向舵和制动踏板组件上的对应舵臂的相同旋转。所述互连u形夹还构造为在所述舵臂组件调整所述制动踏板的位置的调整过程中保持固定的位置。
18.在又一方案中,本发明的实施例提供了一种用于飞机的方向舵和制动踏板组件。所述方向舵和制动踏板组件包括制动踏板组件,所述制动踏板组件具有制动踏板和感测所述制动踏板的位置的位置传感器。所述制动踏板附接至舵臂。位置传感机构感测舵臂的位置。配平机构联接至舵臂。所述配平机构构造为调整用于配平所述飞机的那些控制表面。对中机构构造为使舵臂及附接的制动踏板返回到中立位置。所述配平机构、所述对中机构和所述位置传感机构集成在构造为定位在驾驶舱仪表板下方的单个装置中。
19.在特定实施例中,方向舵和制动踏板组件包括阻尼器组件和负荷传感组件中的一个,阻尼器组件构造为在将所述制动踏板返回到中立位置时防止所述制动踏板的过冲,负荷传感组件具有一个以上的传感器以便在调整用于配平飞机的控制表面时感测由配平机构产生的力。
20.在另一个实施例中,方向舵和制动踏板组件包括摩擦组件和自动驾驶启动机构中的一个,摩擦组件构造为通过舵臂组件向所述飞机的飞行员提供触觉反馈,自动驾驶启动机构用于启动自动驾驶特征。在另一个实施例中,方向舵和制动踏板组件还包括外壳,该外壳构造为容纳所述位置传感机构、所述对中机构和所述配平机构,所述外壳包括用于将所述方向舵和制动踏板组件附接至驾驶舱地板、驾驶舱舱壁或驾驶舱仪表板正下方的装置。
21.本发明的其他方案、目的和优点将在以下结合附图的详细描述中变得更加显而易
见。
附图说明
22.包含在说明书中并构成说明书一部分的附图图示出了本发明的几个方案,并且与说明书一起用于解释本发明的原理。在附图中:
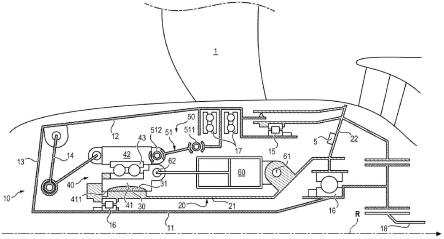
23.图1是根据本发明的实施例构造的用于飞机的方向舵和制动踏板组件的示意图;
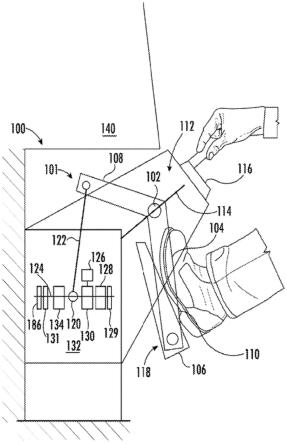
24.图2是根据本发明的实施例的安装在飞机的驾驶舱地板上的方向舵和制动踏板组件的示意图;
25.图3是根据本发明的实施例的安装在飞机的驾驶舱舱壁上的方向舵和制动踏板组件的示意图;以及
26.图4是根据本发明的实施例的安装在飞机的驾驶舱仪表板正下方的方向舵和制动踏板组件的示意图;
27.图5至图7是根据本发明的实施例的具有旋转传感器的制动踏板组件的替代实施例的示意图;以及
28.图8是根据本发明的实施例的用于配平机构中的蜗杆和蜗轮的示意图。
29.尽管将结合某些优选实施例描述本发明,但无意将其限制于那些实施例。相反,其意图是覆盖包括在由所附权利要求限定的本发明的精神和范围内的所有替代物、变型和等同物。
具体实施方式
30.图1至图4是根据本发明的实施例构造的用于飞机的方向舵和制动踏板组件100的示意图。在所示的实施例中,方向舵和制动踏板组件100包括舵臂组件101,其具有连接至水平梁102的一对舵臂104。通常,两个舵臂104是平行的,各个舵臂104具有附接在舵臂104的端部处的脚踏式制动踏板106。当飞行员的脚向下压在制动踏板106中的一个上时,对应的舵臂104围绕水平梁102旋转。这些舵臂104围绕水平梁102的旋转操作以调整用于控制飞机的偏航轴的那些控制表面。
31.各个舵臂104具有上臂部108,该上臂部108与下臂部110联接。在所示实施例中,各个舵臂104在上臂部108和下臂部110的交叉处被装配至水平梁102。在特定实施例中,舵臂组件101包括平移块112,该平移块112附接并定位在两个舵臂104之间。平移块112被装配至一个以上的引导臂114上,该引导臂114沿着平移块和附接的舵臂104的平移或运动的引导路径伸延。平移块112构造为在沿着由一个以上的引导臂114限定的引导路径的任一方向上移动。一个以上的引导臂114允许两个舵臂104的平移或调整,以调整飞行员或副驾驶的制动踏板106的位置。在特定实施例中,平移块112和两个舵臂104的运动经由手轮116、释放闩锁或电机(例如步进电机)来实现。尽管一个以上的引导臂114在附图中被示为线性的,但在替代实施例中,一个以上的引导臂114及相关联的引导路径是曲线的。
32.在某些实施例中,各个舵臂104经由连杆122附接至双臂曲柄120。双臂曲柄120具有中心开口,经由该中心开口,该双臂曲柄120被装配至定心毂轴124上并构造为围绕定心毂轴124旋转。双臂曲柄120具有在定心毂轴124的第一侧上的第一端和在定心毂轴124的与第一侧相反的第二侧上的第二端。双臂曲柄120的第一端经由第一连杆122能够操作地联接
至第一舵臂104的上臂部108,而双臂曲柄120的第二端经由第二连杆122能够操作地联接至第二舵臂104的上臂部108。
33.双臂曲柄120操作使得当第一舵臂104在第一方向上旋转时(例如,由于飞行员向下压在脚踏式制动踏板106中的一个上),第二舵臂104以与第一舵臂104相同的度数,但是在相反方向上旋转。因此,双臂曲柄120确保当其中一个制动踏板106向前移动一些距离时,另一个制动踏板106向后移动相同或相似的距离。在特定实施例中,双臂曲柄120还构造为在舵臂组件101调整附接至第一下臂部和第二下臂部110中的至少一个的端部的制动踏板106的位置的调整过程中保持固定的位置。在设计双臂曲柄120以便即使在制动踏板位置的调整过程中也保持在固定位置方面,与这种类型的标准组件相比,方向舵和制动踏板组件100的设计能够被简化并且制造成本更低。
34.如上所述,移动制动踏板106起作用以控制飞机的偏航轴以操纵飞机的控制转向。当制动踏板106中的一个被压下然后释放时,对中机构130操作以将第一舵臂和第二舵臂104及附接的制动踏板106返回到中立位置。在本文中,“中立位置”是指制动踏板106的这样的位置,其中没有控制表面受到配平机构126或舵臂组件101的影响或控制。该中立位置通常也是制动踏板106的起始位置,在该起始位置,没有压力被施加在任一制动踏板106上。
35.为了在飞行中稳定飞机,飞行员可以通过配平机构126来实现这一点。配平机构126通常由电机操作,例如步进电机,尽管其他电机类型也是可以预期的。配平机构126操作以控制用于配平飞机的控制表面(例如方向舵)的运动。在图8的示意图所示的特定实施例中,配平机构126包括被装配至定心毂轴124上的第一蜗轮142。第一蜗轮142与第一蜗杆144啮合。第一蜗杆144构造为同步旋转以驱动第一蜗轮142,其中第一蜗杆144和第一蜗轮142的运动调整了用于配平飞机的控制表面。在更加特定的实施例中,配平机构126具有装配在定心毂轴124上的第二备用蜗轮142。第二备用蜗轮142与第一蜗轮142相同且平行。配平机构126还具有与第一蜗杆144相同且平行的第二备用蜗杆144。在第一蜗杆144和第一蜗轮142发生故障的情况下,第二蜗杆144和第二蜗轮142的运动以与第一蜗杆144和第一蜗轮142相同的方式调整用于配平飞机的控制表面。
36.当制动踏板106中的一个被压下时,对中机构130将制动踏板106返回到中立位置。在特定实施例中,对中机构130在定心毂轴124上与双臂曲柄120相邻。对中机构130的某些实施例具有将两个舵臂104和附接的制动踏板106偏置到中立位置的一个或多个弹簧,并且可以包括配平机构126以偏置对中机构130,因而将两个舵臂104和附接的制动踏板106偏置到偏移中立位置。
37.负荷传感组件128在定心毂轴124上与对中机构130相邻。负荷传感组件128具有一个以上的传感器,以在操作用于控制飞机的偏航轴的控制表面时感测由舵臂组件101的操作产生的力。在特定实施例中,负荷传感组件128包括负荷传感换能器。除了该负荷传感组件128,某些实施例还包括用于感测舵臂104的位置的位置传感机构129。基于位置传感机构129做出的判定,适当的控制信号被提供给控制飞机的偏航轴的控制表面。在某些实施例中,位置传感机构129是旋转可变差动变压器(rvdt)。
38.在本发明的另一个实施例中,方向舵和制动踏板组件100包括阻尼器组件134,该阻尼器组件134构造为在将制动踏板106返回到中立位置时防止制动踏板106的过冲。在一些实施例中,中立位置可以由配平机构126确定。摩擦组件131用于通过舵臂组件101向飞机
的飞行员提供触觉反馈。例如,在对中机构130发生故障的情况下,摩擦组件131可以进一步构造为将制动踏板106保持在当前位置。
39.在某些实施例中,方向舵和制动踏板组件100还包括外壳132,外壳132构造为容纳配平机构126、双臂曲柄120、对中机构130、负荷传感组件128和阻尼器组件134。在更加特定的实施例中,外壳包括将方向舵和制动踏板组件附接至驾驶舱地板136、驾驶舱舱壁138或驾驶舱仪表板140正下方的装置。图2示出了外壳132的实施例,其中方向舵和制动踏板组件100附接至驾驶舱地板136。图3示出了外壳132的实施例,其中方向舵和制动踏板组件100附接至驾驶舱舱壁。图4示出了外壳132的实施例,其中方向舵和制动踏板组件100附接在驾驶舱仪表板140正下方。用于将外壳附接至驾驶舱地板136、驾驶舱舱壁138或驾驶舱仪表板140正下方的装置包括机械紧固件,例如螺栓、螺母、螺钉、锚固件、钩子、夹子等。
40.如上所述,制动踏板106附接至各个舵臂104的下臂部110的端部。图5至图7示出了制动踏板组件150的三个不同实施例。如所示,制动踏板组件150包括制动踏板106,并且依据实施例可以包括旋转传感器152(在某些实施例中,旋转传感器152将是旋转可变差动变压器(rvdt)传感器)的至少一些部分,以及传感器线156和连接器158。在某些实施例中,连接器158构造为连接至下臂部100上或附近的匹配连接器,使得通过连接或断开传感器线156和连接器158,能够将整个制动踏板组件150附接至舵臂104的下臂部110,或从舵臂104的下臂部110移除。
41.制动踏板106在附接点118处的旋转操作飞机的机轮制动器。旋转传感器152在附接点处被装配至制动踏板和下臂部二者。旋转传感器152构造为确定制动踏板旋转的程度。
42.利用旋转传感器152感测制动踏板106的运动,旋转传感器152可以以舵臂104的连接轴线定向,或平行于舵臂104的连接轴线偏移。弹簧、阻尼器和摩擦装置可以被实施来产生所需的感觉。位置感测可以以几种不同的方式来实施。例如,在示例性实施例中,旋转传感器152包括一些类型的固定连杆装置,该固定连杆装置从操纵杆起延伸并附接至制动踏板106或舵臂104。该特定实施方式要求旋转传感器152的轴线与制动踏板106和舵臂104的枢转轴线对齐。另一种实施方式可以涉及使用与制动踏板106、舵臂104和旋转传感器152接合(interface)的正齿轮。该实施方式允许将旋转传感器152放置在枢转轴线上或远离枢转轴线。下文描述了两种实施方式的示例,并在图5至图7中示出。
43.在图5的实施例中,旋转传感器152是具有传感器外壳160和输入操纵杆162的固定连杆旋转传感器,传感器外壳160具有旋转轴154,传感器外壳160在附接点118处固定到下臂部110,输入操纵杆162联接至制动踏板106并被装配至旋转轴154上,使得制动踏板106的旋转引起附接旋转轴154的输入操纵杆162相对于传感器外壳160旋转。追踪输入操纵杆旋转的程度以确定在飞机轮子上施加了多大的制动力。
44.在图6的实施例中,旋转传感器170是附接至踏板106的偏移传感器旋转传感器,并由扇形齿轮168驱动。扇形齿轮168附接至踏板轴166,踏板轴166固定至下臂部110。配对齿轮171固定到位置传感器轴。配对齿轮171与扇形齿轮168啮合,使得制动踏板106的旋转引起配对齿轮171沿扇形齿轮168行进一段距离,其中该距离与制动踏板旋转的程度成正比,并且与施加到飞机轮子上的制动力的大小成正比。
45.在图7的实施例中,旋转传感器172是轴上旋转传感器,其中输入齿轮174和惰轮176在附接点118处固定到下臂部110,并且内部扇形齿轮178固定到制动踏板106。惰轮176
布置在输入齿轮174和内部扇形齿轮178之间,并在第一侧上与输入齿轮174啮合,并且在与第一侧相反的第二侧上与内部扇形齿轮178啮合。制动踏板106的旋转使惰轮176和内部扇形齿轮178沿输入齿轮174行进一段距离,其中该距离与制动踏板旋转的程度成正比,并且与施加到飞机轮子上的制动力成正比。
46.前述制动踏板106可被附接至制动踏板106的一个以上的弹簧180偏置到正常位置(即,制动踏板106根本不旋转的位置)。在所示实施例中,具有两个弹簧180,并且可以具有联接至旋转传感器172的第三弹簧180。第三弹簧180构造为在两个弹簧380失效的情况下将制动踏板106偏置到正常位置。
47.再次参考图1至图4,方向舵和制动踏板组件100的实施例还包括用于将方向舵和制动踏板组件100连接至相邻的第二方向舵和制动踏板组件(未示出)的互连u形夹186。互连u形夹186操作使得方向舵和制动踏板组件100的第一舵臂或第二舵臂104的旋转引起第二方向舵和制动踏板组件上的对应舵臂104的相同旋转。
48.所有参考文献,包括出版物、专利申请和本文引用的专利,均以相同的程度通过引用并入本文,就好像各个参考文献单独且具体地指示通过引用并入并在此全文阐述一样。
49.在描述本发明的上下文中(尤其是在以下权利要求的上下文中)使用术语“一”和“一个”和“所述”以及类似的指称应解释为涵盖单数和复数,除非本文另有说明或与上下文明显矛盾。除非另有说明,否则术语“包括”、“具有”、“包含”和“含有”将被解释为开放式术语(即,指“包括但不限于”)。除非本文另有说明,否则在本文中陈述的值的范围仅仅意在用作单独引用落入该范围内的各个单独值的速记方法,并且各个单独的值都被并入说明书中,就好像它在本文中单独陈述一样。除非本文另有说明或与上下文明显矛盾,否则本文所述的所有方法都可以以任何合适的顺序执行。本文提供的任何和所有示例或示例性语言(例如,“诸如”)的使用仅旨在更好地阐明本发明并且不对本发明的范围构成限制,除非另有声明。说明书中的任何语言都不应被解释为指示任何未要求保护的要素对于本发明的实践是必不可少的。
50.本文描述了本发明的优选实施例,包括发明人已知的用于实施本发明的最佳模式。在阅读上述描述后,那些优选实施例的变型对于本领域技术人员会变得显而易见。发明人期望技术人员适当地采用这些变型,并且发明人意在以不同于本文具体描述的方式来实践本发明。因此,本发明包括在所附权利要求中记载的主题的所有修改和等同物,只要被适用法律允许。此外,除非本文另有说明或与上下文明显矛盾,否则本发明包括上述要素的所有可能变化形式的任何组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。