技术特征:
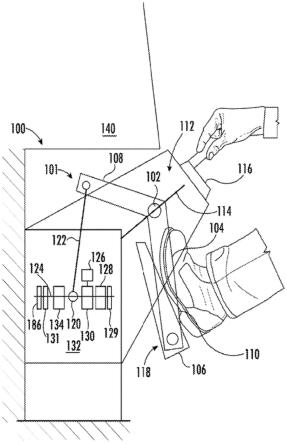
1.一种用于飞机的方向舵和制动踏板组件,所述组件包括:舵臂组件,其具有第一舵臂,其中第一上臂部联接至第一下臂部,并且具有第二舵臂,其中第二上臂部联接至第二下臂部,所述舵臂组件在所述第一上臂部和所述第一下臂部的交叉处以及在所述第二上臂部和所述第二下臂部的交叉处被装配至梁,所述第一舵臂和所述第二舵臂构造为在所述交叉处围绕所述梁旋转,所述第一舵臂和所述第二舵臂的旋转构造为调整用于控制所述飞机的偏航轴的那些控制表面;制动踏板,其在附接点处附接至所述第一下臂部和所述第二下臂部中的至少一个的端部,其中,所述制动踏板在所述附接点处的旋转操作所述飞机的机轮制动器;以及旋转传感器,其在所述附接点处被装配至所述制动踏板和下臂部二者,所述旋转传感器构造为确定制动踏板旋转的程度。2.根据权利要求1所述的方向舵和制动踏板组件,其中,所述旋转传感器是固定连杆旋转传感器,包括:具有旋转轴的传感器外壳,其在所述附接点处固定到所述下臂部;以及输入操纵杆,其联接至所述制动踏板并被装配至所述旋转轴上,使得所述制动踏板的旋转引起所述输入操纵杆和附接的旋转轴相对于所述传感器外壳旋转。3.根据权利要求1所述的方向舵和制动踏板组件,其中,所述旋转传感器是偏移传感器旋转传感器,包括:具有附接的扇形齿轮的传感器外壳,所述传感器外壳固定到所述制动踏板;固定到所述下臂部的配对齿轮,所述配对齿轮啮合扇形齿轮,使得所述制动踏板的旋转引起所述配对齿轮沿所述扇形齿轮行进一段距离,所述距离与所述制动踏板旋转的程度成正比。4.根据权利要求1所述的方向舵和制动踏板组件,其中,所述旋转传感器是轴上旋转传感器,包括:具有输入齿轮和惰轮的传感器,其在所述附接点处固定到所述下臂部;固定到所述制动踏板的内部扇形齿轮,所述惰轮布置在所述输入齿轮和所述内部扇形齿轮之间,并在第一侧与所述输入齿轮啮合,在与所述第一侧相反的第二侧与所述内部扇形齿轮啮合,使得所述制动踏板的旋转引起所述内部扇形齿轮沿所述惰轮和所述输入齿轮行进一段距离,所述距离与所述制动踏板旋转的程度成正比。5.根据权利要求1所述的方向舵和制动踏板组件,还包括外壳,所述外壳构造为容纳配平机构、双臂曲柄、位置传感机构、摩擦组件、对中机构、负荷传感组件和阻尼器组件。6.根据权利要求1所述的方向舵和制动踏板组件,其中,所述外壳包括用于将所述方向舵和制动踏板组件附接至驾驶舱地板、驾驶舱舱壁或附接至驾驶舱仪表板正下方的装置。7.根据权利要求1所述的方向舵和制动踏板组件,其中,所述制动踏板由附接至所述制动踏板的一个以上的弹簧偏置到正常位置,并且还包括联接至所述旋转传感器的第三弹簧,所述第三弹簧构造为在所述一个以上的弹簧失效的情况下将所述制动踏板偏置到所述正常位置。8.根据权利要求1所述的方向舵和制动踏板组件,还包括由电机操作的配平机构,所述配平机构构造为控制所述舵臂组件的中立位置,从而控制用于配平所述飞机的所述控制表面。
9.根据权利要求8所述的方向舵和制动踏板组件,其中,所述配平机构包括第一蜗杆,所述第一蜗杆构造为同步旋转以驱动第一蜗轮,其中,所述第一蜗轮的运动调整了用于配平所述飞机的所述控制表面。10.根据权利要求9所述的方向舵和制动踏板组件,其中,所述配平机构包括平行于所述第一蜗杆的第二备用蜗杆以及平行于所述第一蜗轮的第二备用蜗轮,其中,所述第二蜗轮的运动调整了用于配平所述飞机的所述控制表面。11.根据权利要求8所述的方向舵和制动踏板组件,还包括对中机构,其构造为将所述第一舵臂和所述第二舵臂以及附接的制动踏板返回到由所述配平机构确定的中立位置。12.根据权利要求11所述的方向舵和制动踏板组件,其中,所述对中机构包括将所述第一舵臂和所述第二舵臂以及附接的制动踏板偏置到所述中立位置的一个以上的弹簧,或者构造为将所述第一舵臂和所述第二舵臂以及附接的制动踏板偏置到所述中立位置的电机。13.根据权利要求1所述的方向舵和制动踏板组件,还包括双臂曲柄,其构造为围绕定心毂轴旋转,所述双臂曲柄具有在所述定心毂轴的第一侧上的第一端以及在所述定心毂轴的与所述第一侧相反的第二侧上的第二端,所述第一端能够操作地联接至所述第一上臂部,并且所述第二端能够操作地联接至所述第二上臂部,所述双臂曲柄操作使得当所述第一舵臂在第一方向上旋转时,所述第二舵臂以与所述第一舵臂相同的角度,但在与所述第一方向相反的第二方向上旋转。14.根据权利要求1所述的方向舵和制动踏板组件,还包括负荷传感组件,其具有一个以上的传感器以感测由所述舵臂组件的操作产生的力。15.根据权利要求1所述的方向舵和制动踏板组件,还包括阻尼器组件,其构造为在将舵臂返回到中立位置时防止所述舵臂的过冲。16.根据权利要求1所述的方向舵和制动踏板组件,其中,所述舵臂组件被装配至平移块,所述平移块构造为沿着引导路径移动,从而允许所述第一舵臂和所述第二舵臂调整所述制动踏板的位置的调整。17.根据权利要求16所述的方向舵和制动踏板组件,其中,所述平移块的运动经由手轮、电机或释放闩锁实现。18.根据权利要求1所述的方向舵和制动组件,其中制动踏板组件包括制动踏板,以及具有传感器线和连接器的制动传感器,使得通过连接或断开所述传感器线和所述连接器,整个所述制动踏板组件能够附接至所述下臂部或从所述下臂部移除。19.一种用于飞机的方向舵和制动踏板组件,所述组件包括:舵臂组件,其具有第一舵臂,其中第一上臂部联接至第一下臂部,并且具有第二舵臂,其中第二上臂部联接至第二下臂部,所述舵臂组件在所述第一上臂部和所述第一下臂部的交叉处以及在所述第二上臂部和所述第二下臂部的交叉处被装配至梁,所述第一舵臂和所述第二舵臂构造为在所述交叉处围绕所述梁旋转,所述第一舵臂和第二舵臂的旋转构造为调整用于控制所述飞机的偏航轴的那些控制表面;双臂曲柄,其构造为围绕定心毂轴旋转,所述双臂曲柄具有位于所述定心毂轴的第一侧的第一端和位于所述定心毂轴的与所述第一侧相反的第二侧的第二端,所述第一端能够操作地联接至第一上臂部,并且所述第二端能够操作地联接至所述第二上臂部,所述双臂曲柄操作使得当所述第一舵臂在第一方向上旋转时,所述第二舵臂以与所述第一舵臂相同
的度数,但在与所述第一方向相反的第二方向上旋转,所述双臂曲柄进一步构造为在所述舵臂组件调整附接至所述第一下臂部和所述第二下臂部中的至少一个的端部的制动踏板的位置的调整过程中保持固定的位置;制动踏板组件,其具有制动踏板和感测所述制动踏板的位置的位置传感器,其中所述制动踏板附接至所述第一舵臂或第二舵臂;位置传感机构,其用于感测所述第一舵臂或所述第二舵臂的位置;配平机构,其联接至所述第一舵臂和所述第二舵臂,所述配平机构构造为调整用于配平所述飞机的那些控制表面;对中机构,其构造为使所述第一舵臂和所述第二舵臂返回到中立位置;其中,所述制动踏板组件、所述配平机构、所述对中机构和所述位置传感机构集成在构造为定位在驾驶舱仪表板下方的单个装置中。20.根据权利要求19所述的方向舵和制动踏板组件,还包括互连u形夹,其用于将所述方向舵和制动踏板组件连接至相邻的第二方向舵和制动踏板组件,其中,所述互连u形夹操作使得所述方向舵和制动踏板组件的所述第一舵臂或所述第二舵臂的旋转引起所述第二方向舵和制动踏板组件上的对应舵臂的相同旋转,所述互连u形夹还构造为在所述舵臂组件调整所述制动踏板的位置的调整过程中保持固定的位置。21.根据权利要求19所述的方向舵和制动踏板组件,还包括阻尼器组件,其构造为在将所述制动踏板返回到中立位置时防止所述制动踏板的过冲。22.根据权利要求19所述的方向舵和制动踏板组件,还包括负荷传感组件,其具有一个以上的传感器以感测由所述舵臂组件的操作产生的力。23.根据权利要求19所述的方向舵和制动踏板组件,还包括摩擦组件,其构造为通过所述舵臂组件向所述飞机的飞行员提供触觉反馈。24.根据权利要求19所述的方向舵和制动踏板组件,还包括用于启动自动驾驶特征的自动驾驶启动机构。25.根据权利要求19所述的方向舵和制动踏板组件,还包括外壳,其构造为容纳所述位置传感机构、所述对中机构和所述配平机构,所述外壳包括用于将所述方向舵和制动踏板组件附接至驾驶舱地板、驾驶舱舱壁或驾驶舱仪表板正下方的装置。
技术总结
一种飞机方向舵和制动踏板组件,包括舵臂组件,该舵臂组件具有一个带有第一上臂部和第一下臂部的舵臂,以及另一个带有第二上臂部和第二下臂部的舵臂。舵臂组件在第一上臂部和第一下臂部的交叉处以及第二上臂部和第二下臂部的交叉处被装配至梁。第一舵臂和第二舵臂构造为在交叉处围绕梁旋转。第一舵臂和第二舵臂的旋转构造为调整控制飞机的偏航轴的控制表面。制动踏板附接至第一下臂部和第二下臂部。制动踏板的旋转使飞机制动。旋转传感器被装配至制动踏板和下臂部,并且构造为确定制动踏板旋转的程度。旋转的程度。旋转的程度。
技术研发人员:杰弗里
受保护的技术使用者:伍德沃德公司
技术研发日:2020.10.29
技术公布日:2022/6/15
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。