藤蔓机器人气管插管装置
1.相关申请的交叉引用
2.本技术要求根据35u.s.c.
§
119和2019年8月2日提交的在先美国临时申请序列号62/882239的所有适用法规和条约的优先权。
3.政府利益声明
4.这项发明是在国家科学基金会授予的第1637446号政府资助下完成的。政府拥有本发明的某些权利。
技术领域
5.本发明的领域包括医疗设备,特别是插管设备,以及机器人技术。
背景技术:
6.hawkes等人于2019年7月18日公布的美国专利出版物us2019/0217908描述了一种生长机器人。该生长机器人具有薄壁、中空、加压、顺应主体,该主体通过从其尖端翻转储存在主体内部的新壁材料来拉长主体,并通过主动控制壁材料沿着主体相对侧的相对长度来控制主体的形状。通过使用沿主体长度安装的收缩人造肌肉缩短面对转弯内侧的一侧的壁材料的长度,可以控制壁材料沿主体相对侧的相对长度。壁材料沿主体相对侧的相对长度也可以通过加长面对转弯外侧的一侧的壁材料、通过释放壁材料中的收缩或者通过主动软化材料使得主体由于内部压力而加长来控制。壁材料沿主体相对侧的相对长度也可以通过主动限制面对转弯内侧的一侧的壁材料的长度同时允许转弯外侧的壁材料加长来控制。
7.hawkes等人对生长机器人技术的改进是在软机器人装置中提供的,该装置具有顶端延伸,并包括用于挖掘和清洁的流体喷射。这种软机器人能够在沙子或泥土中挖洞,就像植物的根一样。机器人通过外翻向顶端延伸,同时从顶端喷射流体,使沙子和土壤液化,使其可以在地下生长。该改进在2019年9月13日提交的pct/us2019/50998和hawkes等人题为“具有尖端延伸和颗粒流化的软机器人挖掘装置”的公开论文中公开。
8.由于各种原因,紧急医疗技术人员(emt)在紧急情况下使用气管插管仅获得略高于50%的成功率。为了实现在医院病房中实现的高水平成功,需要以高昂的成本进行广泛的培训,并且观察到如此严重的医疗困境:如何确保在没有护士、护理人员或emt的麻醉师水平培训的情况下有效地提供危急护理。本发明可以用较少的医疗培训来提供医院水平成功,并且预期提高emt和其他人员的成功率。
技术实现要素:
9.优选实施例提供了一种外翻藤蔓机器人插管装置,该装置能够自动和自主地插管气管并产生管腔,通过该管腔可以进行人工通气。该装置包括附接到咬嘴的外翻主藤蔓机器人和与主外翻藤蔓机器人相关的较小直径外翻插管藤蔓机器人。主藤蔓机器人的形状和尺寸设置成在被完全致动时延伸到患者咽喉的后部,插管外翻藤蔓机器人的形状和尺寸设置成在被完全致动时从主藤蔓机器人延伸到患者的气管中。
10.提供了一种用于患者插管的方法。将附接到外翻主藤蔓机器人和插管藤蔓机器人的咬嘴插入到患者口中,主藤蔓机器人和插管藤蔓机器人两者都处于未致动位置。将流体压力施加到主藤蔓机器人中,使其逐渐外翻并延伸到患者喉咽的后部。施加流体压力以将插管藤蔓机器人延伸到患者的气管中,并提供从咬嘴管到气管的管腔。空气或氧气通过管腔进入气管。
附图说明
11.下文将基于附图中所示的示例性实施例更详细地解释本发明,其中:
12.图1a是处于未致动状态的优选实施例藤蔓机器人插管装置的示意图;
13.图1b和1c示出了处于部分致动状态的图1a的藤蔓机器人插管装置;
14.图1d示出了图1a的插管藤蔓机器人的致动,以提供呼吸管从中穿过的管腔;
15.图1e示出了通过由图1d所示的插管藤蔓机器人的延伸产生的管腔插入呼吸管;以及
16.图2a-2c是处于部分和完全致动状态的优选实施例藤蔓机器人插管装置的示意图。
具体实施方式
17.优选实施例藤蔓机器人插管装置包括并且优选由主外翻体、插管体和咬嘴构成,该咬嘴具有允许流体/压力从调节压力容器传递到体内的接入端口。主外翻体在膨胀时沿着喉咙生长,并携带插管主体经过舌头和会厌。在初次膨胀之后,插管主体被充气以生长到会厌之外的气管中。该主体可以作为通道,半刚性呼吸管可以穿过该通道开始人工呼吸。总长度可被预先确定以匹配不同的生理学,例如根据患者的尺寸、年龄或测量的身体特征。优选实施例是便宜的和一次性的,避免了关于清洁和再使用的问题,这导致了医院获得性感染和其他问题。
18.现在将参照附图讨论本发明的优选实施例。附图可以包括示意性表示,鉴于本领域的一般知识和下面的描述,技术人员将会理解这些示意性表示。为了强调,附图中的特征可能被夸大,并且特征可能不按比例绘制。
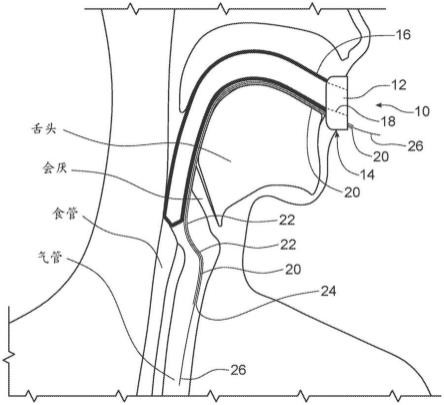
19.图1a-1e示出了优选实施例藤蔓机器人插管装置10,其在插管过程中处于渐进状态。图1a示出了初始状态和未致动状态,其中成形的咬嘴12被插入到患者的口腔14中。咬嘴保持主藤蔓机器人16,并且包括接入端口18,以允许流体/压力传递到主藤蔓机器人16中,从而通过外翻来生长主藤蔓机器人16。插管藤蔓机器人20承载在主藤蔓机器人16的外表面上,并延伸穿过咬嘴10,以允许流体/压力的进入,用于其单独的致动和外翻。在图1a中,插管藤蔓机器人20的大部分被折叠在主藤蔓机器人16内,因为主藤蔓机器人16处于其完全缩回状态,此时其大部分材料向内朝向其中心翻转。通常,主藤蔓机器人和插管藤蔓机器人两者的直径和长度可以根据被插管的患者的生理类型或测量的身体特征(例如年龄、性别)、根据咽喉结构的身体测量等来预先确定。在实践中,医生可以选择可用的藤蔓机器人插管装置,并且可以基于生理学使用适当尺寸的选择。对于主藤蔓机器人16和插管藤蔓机器人20的材料,生物相容塑料是优选的。刚度低于径向刚度,使得主体将随着加压而伸长,而不是向外膨胀。与咬嘴和用于充气的联接器将与当前的医疗技术兼容,例如鲁尔锁。该装置优
选地被消毒和包装以供一次性使用,并且包装和装置可以包括标记以确保医生正确使用。
20.吸嘴12优选地由生物相容塑料或坚固橡胶化合物形成,并且被模制成与人面部和嘴的总体解剖结构相匹配,具有用于插入到嘴中以压下舌头的突起和牙齿可以落入其中以将装置保持在嘴中并设定标准“零”点参考的凹槽,从该标准“零”点参考可以确定插管藤蔓机器人20的延伸。优选的材料包括医用硅树脂、聚氨酯或聚乙烯。如上文关于藤蔓机器人所讨论,根据解剖学特征来确定咬嘴的尺寸。咬嘴12可以容纳允许致动的机械部件(例如按钮)和指示器,以显示它是否已经被使用。硬度是通过膨胀实现的。优选实施例中的咬嘴可以连接到和/或包括压力容器、开始插管的致动机构以及致动和控制两个藤蔓机器人的机械和电气元件。壳体还包括通道,半刚性呼吸管可以通过该通道向下穿过第二主体到达气管。该控制可以包括光、超声波、磁或其他反馈。
21.主藤蔓机器人16是较大主藤蔓机器人,其将较小插管藤蔓机器人20输送到咽喉的后部,同时产生进一步暴露气管的颚推力。主藤蔓机器人16的直径设定成使得当填充口腔和口咽时,它抬起下颌并将其向前和向下突出。流体(例如空气)以足够的压力通过端口18输送,以缓慢充气并翻转主藤蔓机器人16,直到其到达喉咽的后部。一旦到达该点,较小插管藤蔓机器人20通过从其近端延伸穿过咬嘴的流体压力被致动。主藤蔓机器人16可被成形为预定的非线性形状(当伸展时),并且在特定位置具有材料以引入特定压力点来突出下颌骨、提升会厌并暴露气管。hawkes等人的美国专利公开us2019/0217908中公开了在特定部分中成形和产生材料硬度的方法。
22.插管藤蔓机器人20是产生管腔的藤蔓机器人,其从主藤蔓机器人的尖端生长,并进入前庭褶皱之外的气管。通过产生管腔,插管藤蔓机器人提供了用于通过的开放管腔,并在远端终止于开口或可破裂或穿透的临时密封的远端尖端,使得在完全外翻后,其提供从其近端开口到远端开口的开放管腔。远端尖端可以是开放的或者包括例如穿孔的密封件。另一种选择是呼吸管可以穿过的弹性远端尖端。这种类型的远端尖端向医生提供关于呼吸管何时从插管藤蔓机器人的远端尖端穿出的反馈。插管藤蔓机器人20优选设计成以seldinger型方式工作,以在声带部分闭合的情况下进入气管。藤蔓机器人已被证明能够通过比它们主体直径更小的孔。具有合适的柔软度尺寸,插管藤蔓机器人20可以穿过部分闭合的声带,而不管孔尺寸,并且由于消除了刚性通气管和声带之间的相对运动,更大的管可以穿过该管腔。插管藤蔓机器人20也可以设计成使得例如通过硬化或者通过在生长的同时拉动半刚性管穿过其自身来产生人工呼吸通道。通过将刚性管固定到插管主体的开放尖端,当插管主体外翻时,膨胀起到拉力的作用。这允许刚性管的自动输送。另一种选择是将生物相容的自硬化材料注入藤蔓机器人主体的织物中,这允许在体内硬化该装置,以产生其自身的刚性管腔。虽然示出了一个插管藤蔓机器人20,但主藤蔓机器人20可以携带多个插管主体(例如受控插管机器人和非受控/被动简单管腔),旨在增加装置坚固性,以及每个的多种潜在配置。
23.图1b示出了处于致动状态的主藤蔓机器人16。该阶段作为两个子步骤开始:首先,主藤蔓机器人16膨胀并远离咬嘴12向患者的喉咙生长。图1c示出了完全延伸到喉咽中的主藤蔓机器人16。在该点,插管藤蔓机器人20定位成膨胀和生长。插管藤蔓机器人20可以预成形为接近平均解剖结构。
24.图1d示出了插管藤蔓机器人20进入气管的生长。随着插管藤蔓机器人20生长,优
选产生预定形状以将尖端朝向气管向前定向。该插管藤蔓机器人20可以预先形成有一个或两个曲率实例22(两个在图1d和1e中示出)。曲率实例提供预定义形状。如在hawkes等人的美国专利公开us2019/0217908中以及在本技术的背景技术中所讨论,可以不同的方式提供曲率,包括控制插管藤蔓机器人20在不同侧的壁材料的相对长度。插管主体的开放远端24允许产生半刚性呼吸管可以穿过的管腔。
25.图1e示出了呼吸管26首先穿过咬嘴12,其次穿过由插管藤蔓机器人20的延伸提供的管腔的通道,允许呼吸管容易地穿过管腔并进入患者的气管。在该点,装置10可以从患者身上移除,并且可以开始人工呼吸。替代管的另一选择是包括阀来实现peep(正压通气),这可以用来替代呼吸管。如果使用的话,重要的是确保保持足够的压力,使得该装置在呼气过程中不会自行塌陷。呼吸管增加了附加部件和步骤。然而,它确保简单可靠的插管,并且可以降低插管藤蔓机器人装置的成本,因为该装置只需要设计用于输送而不是支持呼吸循环。
26.图2a-2c示出了另一优选实施例藤蔓机器人插管装置30。共同的附图标记用于图1a-1e中所示的共同特征。操作类似于图1a-1e的装置10。在装置30中,插管藤蔓机器人32与主藤蔓机器人34一体形成,作为从主藤蔓机器人34的侧壁延伸的分支。插管藤蔓机器人32包括预先形成弯曲部分36,以帮助对准由其限定的管腔,用于空气管的通过,如图1e所示。可以使用呼吸管。作为另一选择,插管藤蔓机器人和主藤蔓机器人34在远端开口和多个位置结合柔性材料、自膨胀材料,例如镍钛诺,以在整个呼吸循环期间保持呼吸管腔。膨胀在插入过程中克服自膨胀材料的力,然后自膨胀材料保持开口。由于插管机器人32是主藤蔓机器人34的分支,它可以通过相同的压力源和管腔被致动,从而呼吸机可以简单地对藤蔓加压以展开并之后以最少的可能步骤继续通气。优选地,如图2c所示,主藤蔓机器人34具有允许其稍微延伸到食道中的长度。这有助于固定装置30并产生密封以防止吸入,很像喉罩导气管(lma)。
27.虽然已经示出和描述了本发明的具体实施例,但应当理解,其他修改、替换和替代对于本领域普通技术人员来说是显而易见的。在不脱离本发明的精神和范围的情况下,可以进行这样的修改、替换和替代,本发明的精神和范围应当由所附权利要求来确定。
28.在所附权利要求中阐述了本发明的各种特征。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。