控制手术器械
背景技术:
1.使用机器人来辅助和执行手术是已知的。图1示出了典型的手术机器人系统。手术机器人100由基座102、臂104和器械106组成。基座支撑机器人,并且本身可以刚性地附接到例如手术室地面、手术室天花板或推车。臂在基座与器械之间延伸。手臂借助于多个柔性关节108沿着其长度铰接,所述多个柔性关节用于将手术器械定位在相对于患者的期望位置中。手术器械附接到机器人臂的远端。手术器械在端口处穿透患者的身体,以便进入手术部位。在其远端处,该器械包括用于执行医疗程序的末端执行器110。在图1中,所示的末端执行器为一对钳夹。外科医生经由远程外科医生控制台112控制手术机器人100。外科医生控制台包括一个或多个外科医生输入装置114。这些可以采用手动控制器或脚踏板的形式。外科医生控制台还包括显示器116。
2.控制系统118将外科医生控制台112连接到手术机器人100。控制系统从外科医生输入装置接收输入,并将这些输入转换成控制信号以移动机器人臂104和末端执行器110的关节。控制系统将这些控制信号发送至机器人,其中相应关节相应地被驱动。
3.众所周知,末端执行器的钳夹由电缆单独地驱动。这些电缆可用于驱动钳夹的打开和关闭,以便抓握和释放它们之间的物体。相同的电缆也可用于驱动钳夹的偏转运动,以便在钳夹的打开角保持恒定时使钳夹在相同的方向上旋转。由于相同的电缆用于驱动钳夹的打开/关闭和偏转运动两者,这些操作不是独立的。因此,整个打开/关闭运动范围不能在整个偏转运动范围内达到,反之亦然。
4.因此,需要一种控制系统,其更好地调解末端执行器的打开/关闭和偏转运动的相互依赖性。
技术实现要素:
5.根据本发明的一个方面,提供一种用于响应于远程外科医生输入装置的操纵而控制手术器械的操纵的控制系统,所述手术器械包括末端执行器,所述末端执行器具有由铰接联接件连接到轴的可相对的第一末端执行器元件和第二末端执行器元件,所述控制系统被配置成:从所述外科医生输入装置接收(i)改变所述末端执行器的取向,以及(ii)相对于彼此打开所述第一末端执行器元件和所述第二末端执行器元件的命令;响应于改变所述末端执行器的取向的命令,确定所述铰接联接件的纵向轴线与所述末端执行器之间的角度θ;响应于所述打开所述第一末端执行器元件和所述第二末端执行器元件的命令,确定所述第一末端执行器元件与所述第二末端执行器元件之间的打开角将θ与所述铰接联接件的纵向轴线与所述末端执行器之间的最大角度θ
max
进行比较;以及如果θ》θ
max
,驱动所述第一末端执行器元件和所述第二端末端执行器元件旋转,使得(i)铰接联接件的纵向轴线与所述末端执行器之间的角度为θ
max
,并且(ii)所述第一末端执行器元件与所述第二末端执行器元件之间的打开角为
6.控制系统可以被配置成,如果θ≤θ
max
,驱动所述第一末端执行器元件和所述第二末端执行器元件旋转,使得(i)所述铰接联接件的纵向轴线与所述末端执行器之间的角度
为θ,并且(ii)所述第一末端执行器元件与所述第二末端执行器元件之间的打开角为
7.所述角度θ可以在所述铰接联接件的纵向轴线与平分所述末端执行器元件的轴线之间。
8.θ
max
可以是和α
max
的函数,其中α
max
是在所命令的旋转方向上从所述末端执行器元件的铰接联接件的纵向轴线的最大旋转。
9.可选地,
10.所述控制系统可以被配置成通过以下操作确定所述第一末端执行器元件与所述第二末端执行器元件之间的打开角响应于打开所述第一末端执行器元件和所述第二末端执行器元件的命令,确定打开角ψ;将ψ与所述第一末端执行器元件与所述第二末端执行器元件之间的最大角度进行比较;以及如果驱动所述第一末端执行器元件和所述第二末端执行器元件旋转,使得第一末端执行器元件与第二末端执行器元件之间的打开角
11.所述控制系统可以被配置成,如果则驱动所述第一末端执行器元件和所述第二末端执行器元件旋转,使得所述第一末端执行器元件与所述第二末端执行器元件之间的打开角
12.来自所述外科医生输入装置的改变所述末端执行器的取向的命令可包括所述外科医生输入装置的至少一部分在其工作空间中的旋转。
13.所述外科医生输入装置可包括本体和触发器,并且所述来自所述外科医生输入装置的相对于彼此打开所述第一末端执行器元件和所述第二末端执行器元件的命令可包括所述触发器相对于所述本体移动。
14.来自所述外科医生输入装置的相对于彼此打开所述第一末端执行器元件和所述第二末端执行器元件的命令可包括所述触发器远离所述本体旋转。
15.在所述旋转结束时所述触发器与所述本体之间的角度可以与成比例。
16.来自所述外科医生输入装置的相对于彼此打开所述第一末端执行器元件和所述第二末端执行器元件的命令可包括所述触发器相对于所述本体线性平移。
17.所述铰接联接件可包括可由第一对驱动元件驱动的第一关节,以及可由第二对驱动元件驱动的第二关节。所述控制系统可以被配置成通过以下方式驱动所述第一末端执行器元件和所述第二末端执行器元件旋转:命令向所述第一对驱动元件施加第一力,以便使所述第一末端执行器元件围绕所述第一关节旋转;以及命令向所述第二对驱动元件施加第二力,以便使所述第二末端执行器元件围绕所述第二关节旋转。
18.所述铰接联接件还可以包括可由第三对驱动元件驱动的第三关节。所述控制系统可以被配置成:响应于改变所述末端执行器的取向的命令,确定所述轴的纵向轴线与所述铰接联接件之间的角度ω;以及驱动所述末端执行器围绕所述第三关节旋转ω。
19.所述控制系统可以被配置成通过命令向所述第三对驱动元件施加第三力以便使所述末端执行器围绕所述第三关节旋转来驱动所述末端执行器围绕所述第三关节旋转。
20.所述控制系统可以被配置成:在驱动所述第一末端执行器元件和所述第二末端执行器元件旋转使得所述铰接联接件的纵向轴线与所述末端执行器之间的角度为θ
max
之后,从所述外科医生输入装置接收增大所述第一末端执行器元件与所述第二末端执行器元件
之间相对于彼此的打开角的另一命令;响应于所述另一命令:确定所述第一末端执行器元件与所述第二末端执行器元件之间的打开角确定所述铰接联接件的纵向轴线与所述末端执行器之间的角度θ
max’,其中θ
max’是的函数;并驱动所述第一末端执行器元件和所述第二末端执行器元件旋转,使得(i)所述铰接联接件的纵向轴线与所述末端执行器之间的角度为θ
max’,并且(ii)所述第一末端执行器元件与所述第二末端执行器元件之间的打开角为
21.任选地,其中α
max
是在所命令的旋转方向上从所述末端执行器元件的铰接联接件的纵向轴线的最大旋转。
22.所述第一对驱动元件和所述第二对驱动元件中的每一对可包括电缆。
23.所述第一力、第二力和/或第三力可以是张力。
24.所述可相对的第一末端执行器元件和第二末端执行器元件可以是以下当中的一个:一对钳夹、一对剪刀和针驱动器。
附图说明
25.现在将参考附图以举例的方式描述本发明。在附图中:
26.图1示出了用于执行手术程序的手术机器人系统;
27.图2a和2b示出了示例性手术器械的远端;
28.图3示出了示例性外科医生输入装置;
29.图4示出了示例性手术器械的远端;以及
30.图5是控制手术器械的操纵的方法的流程图。
具体实施方式
31.下文描述了从远程外科医生控制台控制手术机器人器械。器械和控制台形成图1所示类型的手术机器人系统的一部分。
32.手术器械由机器人臂支撑。机器人臂本身由基座支撑。在手术期间,将基座固定到手术室的一部分,例如地板、天花板、推车或患者床。机器人臂一直保持在患者外部。机器人臂包括与关节交错的一系列臂连杆。这些关节可以是回转关节。在基座远端的机器人臂的端部可以通过一个或多个关节的移动相对于基座铰接。手术器械附接到机器人臂的远端处的驱动组件。此附接点在患者外部。
33.手术器械具有细长轮廓,其中轴横跨在其近端与其远端之间,所述近端附接到机器人臂,所述远端接近患者体内的手术部位。手术器械的近端和器械轴可以相对于彼此刚性,并且在附接到机器人臂时相对于机器人臂的远端刚性。向患者体内做出切口,通过所述切口插入端口。手术器械可通过端口穿透患者身体,以便进入手术部位。替代地,手术器械可以通过身体的自然腔道穿透身体以接近手术部位。在器械的近端处,轴连接到器械接口。器械接口与机器人臂的远端处的驱动组件接合。具体地说,器械接口的各个器械接口元件接合驱动组件的各个驱动组件接口元件。器械接口可与驱动组件可释放地接合。器械可以手动从机器人臂上拆卸,而不需要任何工具。这使得在操作期间器械能够快速地从驱动组件上拆卸,并且附接另一器械。
34.在手术器械的远端处,轴由铰接联接件连接到末端执行器。末端执行器在手术部位处参与手术程序。图2a和2b示出了示例性器械的远端,其具有一对钳夹作为末端执行器201。轴202由铰接联接件203连接到末端执行器201。铰接联接件203包括若干关节。这些关节使得末端执行器的姿态能够相对于器械轴的方向改变。尽管图2a和2b中未示出,但末端执行器还可以包括关节。在图2a和2b的实例中,铰接联接件203包括俯仰关节204。俯仰关节204围绕俯仰轴线205旋转,该俯仰轴线垂直于轴202的纵向轴线206。俯仰关节204允许支撑体213(下文描述)且因此允许末端执行器201围绕俯仰轴线205相对于轴旋转。在图2a和2b的实例中,铰接联接件还包括第一偏转关节207和第二偏转关节211。第一偏转关节207围绕第一偏转轴线208旋转。第二偏转关节211围绕第二偏转轴线212旋转。偏转轴线208和212都垂直于俯仰轴线205。偏转轴线208和212可以是平行的。偏转轴线208和212可以是共线的。铰接联接件203包括支撑体213。在一端,支撑体213由俯仰关节204连接到轴202。在另一端,支撑体213由偏转关节207和211连接到末端执行器201。为了便于图示,图2a省略了该支撑体,以便能够更容易地看到铰接联接件的其它结构。末端执行器201包括两个末端执行器元件209、210。所示末端执行器元件是相对的钳夹。然而,末端执行器元件可以是任何类型的相对末端执行器元件,其另外的实例稍后论述。第一偏转关节207与第一末端执行器元件209固定,并且允许第一末端执行器元件209围绕第一偏转轴线208相对于支撑体213和俯仰关节204旋转。第二偏转关节211与第二末端执行器元件210固定,并且允许第二末端执行器元件210围绕第二偏转轴线212相对于支撑体213和俯仰关节204旋转。
35.图2a和2b中所示的关节由一对驱动元件驱动。驱动元件是细长的。它们在横向于纵向跨度上是柔性的。它们抵抗沿着其纵向跨度的压缩力和张力。每对驱动元件在器械轴的另一端固定到器械接口的相应器械接口元件。因此,机器人臂按如下方式将驱动力传递到末端执行器:驱动组件接口元件的移动使器械接口元件移动,所述器械接口元件使驱动元件移动,所述驱动元件使铰接部和/或末端执行器的一个或多个关节移动,从而使所述末端执行器移动。驱动元件可以是线缆。驱动元件可包括若干柔性部分和一个刚性部分。柔性部分接合器械接口和铰接联接件的部件,并且刚性部分延伸穿过器械轴的全部或部分。例如,柔性部分可以是电缆,并且刚性部分可以是辐条。其它刚性部分可以在器械接口或器械的铰接联接件中。例如,齿条和小齿轮可以在器械接口或器械的铰接联接件中。
36.图2a和2b示出了第一对驱动元件a1、a2,其被约束以围绕第一偏转关节207移动。驱动元件a1、a2驱动第一末端执行器元件209围绕第一偏转轴线208旋转。图2a和2b示出了第二对驱动元件b1、b2,其被约束以围绕第二偏转关节211移动。驱动元件b1、b2驱动第二末端执行器元件210围绕第二偏转轴线212旋转。图2a和2b还示出了第三对驱动元件c1、c2,其被约束以围绕俯仰关节204移动。驱动元件c1、c2驱动末端执行器201围绕俯仰轴线205旋转。可以通过向驱动元件c1和/或c2施加张力,围绕俯仰轴线205旋转末端执行器201。俯仰关节204和偏转关节207、211独立地由它们各自的驱动元件驱动。
37.末端执行器元件209和210可独立地旋转。末端执行器元件可以在相反的旋转方向上旋转。例如,可以通过向驱动元件a2和b1施加张力,使末端执行器元件在相对的旋转方向上朝向彼此旋转。这一起关闭末端执行器元件,其可用于(i)抓握末端执行器元件之间的物体,例如组织或针或线和/或(ii)切割末端执行器元件之间的物体,例如组织或线。可以通过向驱动元件a1和b2施加张力来使末端执行器元件在相对的旋转方向上远离彼此旋转。这
打开末端执行器元件,其可用于(i)释放已在末端执行器元件之间抓握的物体,和/或(ii)重新打开一对剪刀末端执行器元件准备好另一切割动作。可以通过向驱动元件a1、b1或替代地向a2和b2施加张力,在同一旋转方向上旋转两个末端执行器元件。这使末端执行器元件围绕枢轴轴线208和212偏转。这可用于使末端执行器能够接近手术部位的不同部分。替代地,在一个末端执行器元件保持就位时,通过向驱动元件a1、a2、b1、b2中的仅一个施加张力,可以(在任一旋转方向上)旋转另一末端执行器元件。因此,通过操纵相同对驱动元件:用于第一末端执行器元件209的a1、a2以及用于第二末端执行器元件210的b1、b2来实现末端执行器的抓握运动和偏转运动。
38.具有可相对的末端执行器元件的任何类型的器械都与以下描述相关。第一示例性类型是切割器械,末端执行器元件接合以便切割末端执行器元件之间的组织或另一物体。第二示例性类型是抓握器械,末端执行器元件接合以在末端执行器元件之间抓握组织或另一物体。
39.外科医生控制台包括一个或多个外科医生输入装置。每个外科医生输入装置使外科医生能够向控制系统提供控制输入。例如,外科医生输入装置可以是手动控制器,脚动控制器,例如踏板,将由手指或身体的另一部分控制的触敏输入,语音控制输入装置,眼睛控制输入装置或手势控制输入装置。外科医生输入装置可以提供外科医生可以单独操作的若干输入。
40.图3示出了示例性手动控制器300。手动控制器例如通过万向装置(未示出)连接到外科医生控制台。这使手动控制器能够相对于外科医生控制台以三个平移自由度移动。所示手动控制器旨在由右手抓握。可以由左手抓握镜像手动控制器。手动控制器包括适合由手部抓握的本体301。手动控制器可包括额外输入,例如按钮、开关、杠杆、滑轨输入或电容性传感器输入,例如跟踪板303。图3的手动控制器包括触发器302。触发器302可相对于本体301移动。在所示的手动控制器中,触发器302可相对于本体301旋转。替代地或另外,触发器可以相对于本体301线性地平移。手动控制器可包括两个触发器,每个触发器用于独立地控制末端执行器元件209、210中的单个不同末端执行器元件。
41.外科医生可以相对于手动控制器的本体301旋转触发器302,以便命令器械的末端执行器元件209、210在抓握/闭合运动中闭合或在释放/打开运动中打开。例如,外科医生可以将触发器302朝向手动控制器的本体301旋转以命令抓握/闭合运动。外科医生可以远离手动控制器的本体301旋转触发器302以命令释放/打开运动。外科医生可以在手动控制器工作空间中旋转手动控制器的本体以命令末端执行器元件的取向改变。
42.控制系统将外科医生控制台连接到手术机器人。控制系统包括处理器和存储器。存储器以非暂态方式存储可以由处理器执行的软件代码,以使处理器以本文描述的方式控制外科医生控制台和机器人臂和器械。控制系统从外科医生输入装置接收输入,并将其转换成控制信号以移动机器人臂的关节和/或铰接联接件的关节和/或末端执行器的关节。控制系统将这些控制信号发送至机器人臂,其中相应关节相应地被驱动。响应于对外科医生输入装置的操纵,手术器械的操纵由此由控制系统控制。
43.当控制系统控制具有相对的末端执行器元件的器械时,在检测到手动控制器的打开运动时,控制系统通过命令向末端执行器元件的驱动元件施加力以使末端执行器元件在相对的旋转方向上远离彼此旋转来进行响应。参考图2a和2b,控制系统通过命令向a1施加
力,向b2施加力从而引起末端执行器元件展开来响应于检测到打开运动。
44.在检测到手动控制器在手动控制器工作空间中的第二运动时,控制系统可以通过命令以下当中的任何一个或组合进行响应:(i)手术机器人臂的关节,(ii)手术器械的铰接联接件203的关节,和(iii)末端执行器的关节。该命令的铰接使得末端执行器的姿态如第二运动所引导而改变。例如,第二运动可以是手动控制器的本体301的旋转。作为另一实例,第二运动可以是操纵手动控制器上的另一输入,例如移动另一触发器。该移动可以是另一触发器相对于手动控制器的本体的旋转。替代地或另外,该另一触发器可以相对于本体301线性地平移。
45.因此,控制系统可以至少部分地通过命令向末端执行器元件的驱动元件施加力以使末端执行器元件旋转来对检测到手动控制器的本体的第二运动(例如,旋转)进行响应。例如,参考图2a和2b,控制系统可以命令向a2和b2施加力以使末端执行器元件209和210在顺时针方向上偏转。控制系统可以命令向a1和b1施加力以使末端执行器元件209和210在逆时针方向上偏转。控制系统可以命令向a1和b1(或a2和b2)两者施加相同力。如果末端执行器元件配合,并且这些末端执行器元件的驱动元件配合,那么对于末端执行器元件未完全闭合并且对彼此施加力的配置,对a1和b1(或a2和b2)施加相同力使两个末端执行器元件一致地偏转。控制系统还可以通过命令向c1和c2中的一个施加力以使俯仰关节204旋转,来对检测到手动控制器的本体的第二运动(例如,旋转)来进行响应。控制系统还可以通过命令围绕机器人臂的一个或多个关节施加扭矩来对检测到手动控制器的本体的第二运动(例如旋转)来进行响应。
46.利用相同的驱动元件a1、a2和b1、b2来驱动末端执行器元件旋转以相对于彼此打开和关闭末端执行器元件以及使末端执行器偏转。因此,打开/关闭和偏转操作不是独立地驱动的。
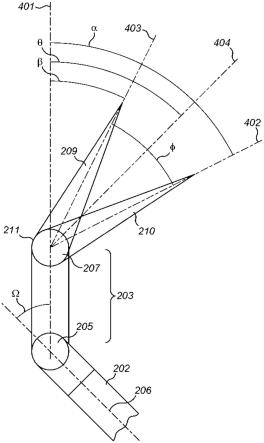
47.参考图4,每个末端执行器元件209、210能够围绕其连接的关节207、211的轴线相对于铰接联接件203的纵向轴线401旋转。距铰接联接件203的纵向轴线401最远的末端执行器元件的纵向轴线402在图4中描绘为与铰接联接件203的纵向轴线401分开角度α。最靠近铰接联接件203的纵向轴线401的末端执行器元件的纵向轴线403在图4中描绘为与铰接联接件203的纵向轴线401分开角度β。末端执行器元件由宽展分开。换句话说,末端执行器元件的纵向轴线402与403之间的角度是
48.每个末端执行器元件在其围绕其连接的关节的轴线旋转的程度方面受到限制。最远末端执行器的纵向轴线402与铰接联接件203的纵向轴线401之间的最大旋转角为α
max
。例如,α
max
可以在60
°
至90
°
的范围内。α
max
可以在65
°
至80
°
的范围内。α
max
可以为70
°
。α
max
可以取决于器械。末端执行器元件可以打开到扩展角然后如图4所示顺时针偏转。当末端执行器元件偏转时,一开始维持打开角然而,一旦最远末端执行器元件210以α
max
角度达到其旋转限制,其就停止旋转。如果外科医生输入装置继续命令偏转动作,并且控制系统继续相应地驱动器械,那么末端执行器元件210保持静止,但另一个末端执行器元件209继续偏转,即继续顺时针旋转。因此,打开角开始减小,因此,即使外科医生输入装置仍命令末端执行器元件保持打开,末端执行器元件也开始关闭。
49.在图4中,末端执行器示出为相对于铰接联接件的纵向轴线401在顺时针方向上已偏转。因此,末端执行器元件210离铰接联接件的纵向轴线401最远。轴402和401之间的最大
旋转角度为α
max
。当末端执行器相对于铰接联接件的纵向轴线401在逆时针方向上偏转时,末端执行器元件209离铰接联接件的纵向轴线401最远。在此情形中,轴线401与403之间的最大旋转角为α
max
。对于一个末端执行器元件顺时针旋转且另一个末端执行器元件逆时针旋转,最大旋转角α
max
可以相同。对称器械可能就是这种情况。对于其它器械,对于一个末端执行器元件顺时针旋转,另一个末端执行器元件逆时针旋转,最大旋转角α
max
可以不同。例如,不对称器械可能就是这种情况。对于一些不对称器械,末端执行器元件可以具有运动范围,该运动范围限于铰接联接件的纵向轴线401的仅一侧。在此情形中,相同的末端执行器元件总是离铰接联接件的纵向轴线401最远。
50.末端执行器元件也可以在它们可以远离彼此旋转多远的程度上受限。例如,打开角可以限于角可以限于可能是取决于器械的。例如,可以在40
°
至90
°
的范围内。可以在45
°
至75
°
的范围内。
51.图5示出了由控制系统实施以限制末端执行器的偏转运动以便优先维持末端执行器元件的打开角的方法。
52.在图5的步骤501处,控制系统从外科医生输入装置接收(i)改变末端执行器的取向,以及(ii)相对于彼此打开末端执行器元件的命令。
53.如上文所描述,来自外科医生输入装置的改变末端执行器的取向的命令可以是外科医生输入装置在其工作空间中的旋转。外科医生输入装置可以由铰接连杆,任选地包括万向组件连接到外科医生控制台。位置传感器可以包括在铰接连杆的每个可移动关节上。控制系统接收铰接连杆的每个关节的感测位置。根据铰接连杆中的连杆和关节的已知顺序、质量和长度以及所接收的感测位置,控制系统确定外科医生输入装置的取向变化。根据外科医生输入装置的取向变化,控制系统确定所命令的改变末端执行器的取向。
54.来自外科医生输入装置的相对于彼此打开末端执行器元件的命令可以是触发器远离外科医生输入装置的本体的旋转。替代性地,来自外科医生输入装置的相对于彼此打开末端执行器元件的命令可以是触发器相对于本体的线性平移。例如,图3的手动控制器300可包括位置传感器,该位置传感器感测触发器302相对于手动控制器的本体301的旋转(或线性)位置。控制系统从位置传感器接收触发器的感测旋转(或线性)位置。
55.在步骤502处,响应于改变末端执行器的取向的命令,控制系统确定铰接联接件的纵向轴线与末端执行器之间的角度。图4示出了在铰接联接件的纵向轴线401与平分末端执行器元件的轴线404之间的θ。在图4中,平分轴线404是使得(i)轴线402、403和404都在某一点处相交,并且(ii)轴线402和404之间的角度等于轴线403和404之间的角度。轴线402、403和404在它们与偏转轴线207和212汇合之处相交。
56.角度θ是确定实现由外科医生输入装置命令的取向改变的角度。角度θ可以与外科医生输入装置在其工作空间中旋转穿过的角度成比例。在取向变化由外科医生输入装置的一部分的运动命令的情况下,例如另一触发器,角度θ可以与外科医生输入装置的所述部分旋转所经过的角度或外科医生输入装置的所述部分已线性平移的距离成比例。
57.在步骤503处,控制系统将θ与θ
max
进行比较。θ
max
是θ的最大值。换句话说,θ
max
是铰接联接件的纵向轴线401与末端执行器之间的最大角度。θ
max
可以随末端执行器元件的打开角而变。替代地或另外,θ
max
可以是最远末端执行器元件的最大旋转角α
max
的函数。例如,
[0058][0059]
控制系统确定是否θ》θ
max
。如果θ≤θ
max
,则控制末端执行器元件旋转,使得铰接联接件的纵向轴线401与末端执行器之间的角度为θ不会使末端执行器元件的打开角开始关闭。因此,如果θ≤θ
max
,则在步骤504处,控制系统驱动第一末端执行器元件和第二末端执行器元件旋转,使得铰接联接件的纵向轴线401与末端执行器之间的角度为θ。例如,铰接联接件的纵向轴线401与平分轴线404之间的角度为θ。
[0060]
如果在步骤503处,控制系统确定θ》θ
max
,那么控制末端执行器元件旋转,使得铰接联接件的纵向轴线401与末端执行器之间的角度为θ使得末端执行器元件的打开角开始闭合。因此,实际上,在步骤505处,控制系统驱动第一末端执行器元件和第二末端执行器元件旋转,使得铰接联接件的纵向轴线401与末端执行器之间的角度为θ
max
。例如,铰接联接件的纵向轴线401与平分轴线404之间的角度为θ
max
。
[0061]
同时,控制系统确定驱动第一末端执行器元件与第二末端执行器元件之间的打开角在步骤506处,响应于打开末端执行器元件的命令,控制系统确定第一末端执行器元件与第二末端执行器元件之间的打开角ψ。具体地说,ψ是第一末端执行器元件402的纵向轴线与第二末端执行器元件403的纵向轴线之间的角度。角度ψ是确定实现由外科医生输入装置命令的末端执行器元件之间的打开角的角度。一旦触发器已被移动以执行步骤501的命令,则角度ψ可以与触发器相对于外科医生输入装置本体的旋转位置成比例。
[0062]
在步骤507处,控制系统将ψ与进行比较。控制系统确定是否进行比较。控制系统确定是否如果则在步骤508处,控制系统驱动第一末端执行器元件和第二末端执行器元件旋转,使得末端执行器元件的纵向轴线402与403之间的角度
[0063]
如果在步骤507处,控制系统确定在步骤509处,控制系统驱动第一末端执行器元件和第二末端执行器元件旋转,使得末端执行器元件的纵向轴线402与403之间的角度
[0064]
在图5上,步骤504、505、508和509全部包括在虚线步骤510内。这是为了指示在图5的控制方法的给定迭代中实施的步骤504、505、508和509中的那些步骤是协同实施的。例如,如果对步骤503和507两者的回答为否,则步骤504和508协同执行。如果对步骤503和507的回答为“是”,则步骤505和509是协同执行的。如果步骤503的回答为“否”,且步骤507的回答为“是”,则步骤504和509是协同执行的。如果步骤503的回答为“是”,且步骤507的回答为“否”,则步骤505和508是协同执行的。
[0065]
协同执行意指控制系统确定向第一对驱动元件a1、a2施加力,向第二对驱动元件b1、b2施加力,以便使(i)末端执行器被驱动到θ或θ
max
,以及(ii)打开角被驱动到(即,或)。
[0066]
响应于改变末端执行器的取向的命令,控制系统还可以确定轴202的纵向轴线206与铰接联接件203的纵向轴线401之间的角度ω。确定角度θ和ω以共同实现外科医生输入装置命令的取向变化。例如,组合角θ ω可以与外科医生输入装置在其工作空间中旋转经过的角度成比例。在此情形中,在步骤510处,控制系统驱动第三对驱动元件c1、c2,以便使支撑体213且因此使末端执行器201围绕俯仰轴线205旋转角度ω。
[0067]
在末端执行器元件和/或支撑体已驱动到参考步骤510描述的角度之后,控制回路可以重复。换句话说,可以在步骤501处由控制系统接收改变末端执行器的取向并打开末端执行器元件的另一命令。在这种情况下,上述方法重复。替代地,在步骤511处,控制系统可以接收增大末端执行器元件之间的打开角的另一命令。例如,外科医生输入装置的触发器可能已经最远离外科医生输入装置的本体旋转。从外科医生输入装置没有接收改变末端执行器的取向的命令。如果在步骤510处,末端执行器已经被驱动到θ
max
,那么最远的末端执行器元件210已经处于可以在当前打开角处维持的最大旋转角α
max
。
[0068]
响应于步骤511中的另一命令,在步骤512处,控制系统确定统确定是第一末端执行器元件与第二末端执行器元件之间的打开角。确定以实现由外科医生输入装置在步骤511处命令的末端执行器元件之间的打开角。一旦触发器已经移动以执行步骤511的命令,角度可以与触发器相对于外科医生输入装置的本体的旋转位置成比例。
[0069]
然后,在步骤513处,控制系统确定θ
max’。θ
max’是铰接联接件的纵向轴线与使打开角得以维持的末端执行器之间的最大角度。θ
max’可以是末端执行器元件的打开角的函数。替代地或另外,θ
max’可以是最远末端执行器元件的最大旋转角α
max
的函数。例如,
[0070][0071]
然后,在步骤514处,控制系统驱动末端执行器元件旋转,使得(i)铰接联接件的纵向轴线与末端执行器之间的角度为θ
max’,并且(ii)第一末端执行器元件与第二末端执行器元件之间的打开角为因此,在实践中,最远末端执行器元件210将其旋转位置保持在α
max
,并且驱动最接近末端执行器元件209朝向铰接联接件401的纵向轴线旋转,从而实现期望的打开角
[0072]
作为数值示例,考虑α
max
=70
°
的情况。在步骤508处,将末端执行器元件的打开角驱动到因此,使用等式1,θ
max
=45
°
。在步骤510处,将末端执行器驱动到θ
max’=45
°
。因此,各个末端执行器元件在铰接联接件的纵向轴线401的20
°
和70
°
处。在步骤511处,控制系统从外科医生输入装置接收命令,以将末端执行器元件打开到的打开角。由于α
max
=70
°
,使用方程式2,θ
max’=40
°
。因此,各个末端执行器元件在铰接联接件的纵向轴线401的10
°
和70
°
处。
[0073]
因此,图5的控制方法防止当外科医生输入装置命令增大末端执行器的偏转运动时,末端执行器元件的打开角减小。维持末端执行器元件的打开角优先于最大化每个个别末端执行器元件可从铰接联接件的纵向轴线401旋转的角度。
[0074]
图5的控制方法中示出的步骤是与本文所处理的问题相关的步骤。控制系统在图5的控制方法期间执行许多其它步骤。这些其它步骤在图5中未示出。
[0075]
末端执行器可以采用任何合适的形式。例如,末端执行器可以是一对弯曲剪刀,电外科器械,例如一对单极剪刀、针架、一对钳夹或开口抓握器。
[0076]
本文描述的机器人可以用于除手术之外的目的。例如,端口可以是制造物品如汽车发动机中的检查端口,并且机器人可以控制观察工具以观察发动机内部。
[0077]
申请人在此独立地公开了本文描述的每个单独的特征以及两个或更多个这种特
征的任意组合,只要这些特征或组合能够基于本说明书作为一个整体根据本领域技术人员的公知常识来实施,而不管这些特征或特征的组合是否解决本文公开的任何问题,并且不限制权利要求的范围。申请人指出,本发明的各方面可以由任何这样的单个特征或特征组合组成。鉴于以上描述,对于本领域技术人员来说显而易见的是,可以在本发明的范围内进行各种修改。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。