1.本发明属于安全栓安全状态识别技术领域,特别是关于一种压模机安全栓安全状态的识别算法。
背景技术:
2.压膜机又被称为压力机,压力机是一种结构精巧的通用性机器,可广泛应用于切断、冲孔、柳合和成形等工艺,压力机分为螺旋压力机、曲柄压力机和液压机三大类,其下部都装有锻件顶出装置。压力机由电机经过传动机构带动工作机构,对工件施加工艺力,传动机构为皮带传动、齿轮传动的减速机构,工作机构分为螺旋机构、曲柄连杆机构和液压杠。
3.螺旋压力机无固定下死点,对较大的模锻件,可以多次打击成形,可以进行单打、连打和寸动,打击力与工件的变形量有关,变形大时打击力小,变形小时打击力大,在这些方面,它与锻锤相似,但它的打击力通过机架封闭,故工作平稳,震动比锻锤小得多。
4.压模机在使用过程中,需要使用到安全栓,来保证操作员工的安全性,但是为了更好地对操作员工的自身安全保护,需要一种压膜机安全栓安全状态的识别算法,来保证安全栓在员工操作时是处于安全可用的状态的。
技术实现要素:
5.针对现有技术的不足,本发明提供了一种压模机安全栓安全状态的识别算法,具备识别安全栓安全状态等优点。
6.本发明提供了一种压模机安全栓安全状态的识别算法,其特征在于:包括以下步骤:
7.步骤一、收集安全栓正常工作时的电压值数据库;
8.步骤二、将正常状态下的安全栓放置在压膜机的工作台上,计算此时通过安全栓的压力值,将安全栓安全状态下的电压值打上标签,标注为1,安全栓不安全状态下的电压值标注为0,并对所有的电压值进行分类,得到测试样本和训练样本;
9.步骤三、将步骤二中的安全栓继续向下移动穿过工作台直至安全栓的底面低于工作台台面的底面;
10.步骤四、将上述步骤中的安全栓旋转九十度;
11.步骤五、安全栓放置到位检测装置将安全栓是否放置在工作台上的信号传递给压力机的plc;
12.步骤六、在步骤三中,检测装置一处于接近开关一的检测范围内,接近开关一向plc发出信号,通过plc内编程设定,只有接近开关一有信号时代表安全栓已放置在工作台上;
13.步骤七、在安全栓旋转九十度时,另一个检测板转至与其相对应的接近开关上,接近开关检测到检测板并给压模机plc发出信号,代表安全栓已放置在工作台上,并且已经锁紧;
14.步骤八、静态背景模型建立与更新:
15.通过一秒左右的序列帧进行时域中值滤波获得静态背景模型,利用跟踪后结构更新静态模型,减少由于噪声引起场景变化对于目标检测效果的跟踪。
16.优选地,步骤二到步骤七提取的电压形成特征向量。
17.优选地,步骤六与步骤七中检测装置的距离小于接近开关之间的距离。
18.优选地,步骤一还包括对电压值的保留相同的小数点,方便后期数据统计的记录以及程序的运算。
19.优选地,步骤六范围检测中的步骤包括,利用导电介质的导电功能,测量通过导电介质中的电压,在得到电压数值之后,再利用欧姆定律,算出通过的电流,然后根据长度和电阻的关系,得到二之间的距离。
20.优选地,步骤二中在测量电压数值时,可以通过将cnn测量出安全栓的空间结构,然后利用测量装置测量出空间结构中的三维位置数据,从而可以虚拟绘制出安全栓的空间图像,在安全栓的安全出现状况时,及时通过数据了解,根据偏转特征点计算每个安全栓空间结构中的偏转角度,根据偏转角度将安全栓的空间数据修正,修正后的数据统一保留三位小数。
21.优选地,在得到安全栓的空间结构数据之后,在安全栓与工作台接触时,记录下此时数据,代表安全栓不安全时的数据,此时判断安全栓处于非正常状态,而且电压数值为1,统一记录下该数值,然后反复测试,得到最准备的数据。
22.优选地,步骤八中将帧间差法和背景检测的融合,利用三帧差值得到物体移动轮廓,三帧差值操作是为判定合法运动区域,然后利用背景减除法提取整个运动区域。
23.与现有技术相比,本发明提供了一种压模机安全栓安全状态的识别算法,具备以下有益效果:
24.本发明可以在使用压模机之前,利用该识别算法,可以将安全栓的安全状态检测出来,从而来保护操作工人在工作时的人身安全,提高了工作的安全性。
附图说明
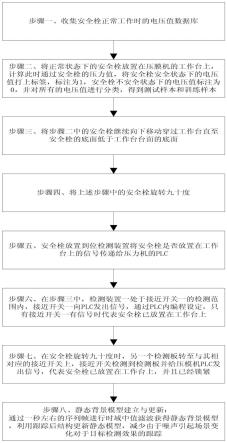
25.图1为本发明提供的一种压模机安全栓安全状态的识别算法的流程图。
具体实施方式
26.下面结合附图,对本发明的具体实施方式进行详细描述,但应当理解本发明的保护范围并不受具体实施方式的限制。
27.除非另有其它明确表示,否则在整个说明书和权利要求书中,术语“包括”或其变换如“包含”或“包括有”等等将被理解为包括所陈述的元件或组成部分,而并未排除其它元件或其它组成部分。
28.如图1所示,根据本发明优选实施方式的一种压模机安全栓安全状态的识别算法,包括以下步骤:
29.步骤一、收集安全栓正常工作时的电压值数据库;
30.步骤二、将正常状态下的安全栓放置在压膜机的工作台上,计算此时通过安全栓的压力值,将安全栓安全状态下的电压值打上标签,标注为1,安全栓不安全状态下的电压
值标注为0,并对所有的电压值进行分类,得到测试样本和训练样本;
31.步骤三、将步骤二中的安全栓继续向下移动穿过工作台直至安全栓的底面低于工作台台面的底面,
32.步骤四、将上述步骤中的安全栓旋转九十度;
33.步骤五、安全栓放置到位检测装置将安全栓是否放置在工作台上的信号传递给压力机的plc;
34.步骤六、在步骤三中,检测装置一处于接近开关一的检测范围内,接近开关一向plc发出信号,通过plc内编程设定,只有接近开关一有信号时代表安全栓已放置在工作台上;
35.步骤七、在安全栓旋转九十度时,另一个检测板转至与其相对应的接近开关上,接近开关检测到检测板并给压模机plc发出信号,代表安全栓已放置在工作台上,并且已经锁紧;
36.步骤八、静态背景模型建立与更新:
37.通过一秒左右的序列帧进行时域中值滤波获得静态背景模型,利用跟踪后结构更新静态模型,减少由于噪声引起场景变化对于目标检测效果的跟踪。
38.进一步,步骤二到步骤七提取的电压形成特征向量。
39.进一步,步骤六与步骤七中检测装置的距离小于接近开关之间的距离。
40.进一步,步骤一还包括对电压值的保留相同的小数点,方便后期数据统计的记录以及程序的运算。
41.本发明实施例提供了一种压模机安全栓安全状态的识别算法,包括以下步骤:
42.步骤一、收集安全栓正常工作时的电压值数据库;
43.步骤二、将正常状态下的安全栓放置在压膜机的工作台上,计算此时通过安全栓的压力值,将安全栓安全状态下的电压值打上标签,标注为1,安全栓不安全状态下的电压值标注为0,并对所有的电压值进行分类,得到测试样本和训练样本;
44.步骤三、将步骤二中的安全栓继续向下移动穿过工作台直至安全栓的底面低于工作台台面的底面,
45.步骤四、将上述步骤中的安全栓旋转九十度;
46.步骤五、安全栓放置到位检测装置将安全栓是否放置在工作台上的信号传递给压力机的plc;
47.步骤六、在步骤三中,检测装置一处于接近开关一的检测范围内,接近开关一向plc发出信号,通过plc内编程设定,只有接近开关一有信号时代表安全栓已放置在工作台上;
48.步骤七、在安全栓旋转九十度时,另一个检测板转至与其相对应的接近开关上,接近开关检测到检测板并给压模机plc发出信号,代表安全栓已放置在工作台上,并且已经锁紧;
49.步骤八、静态背景模型建立与更新:
50.通过一秒左右的序列帧进行时域中值滤波获得静态背景模型,利用跟踪后结构更新静态模型,减少由于噪声引起场景变化对于目标检测效果的跟踪。
51.进一步,步骤六范围检测中的步骤包括,利用导电介质的导电功能,测量通过导电
介质中的电压,在得到电压数值之后,再利用欧姆定律,算出通过的电流,然后根据长度和电阻的关系,得到二之间的距离。
52.进一步,步骤二中在测量电压数值时,可以通过将cnn测量出安全栓的空间结构,然后利用测量装置测量出空间结构中的三维位置数据,从而可以虚拟绘制出安全栓的空间图像,在安全栓的安全出现状况时,及时通过数据了解,根据偏转特征点计算每个安全栓空间结构中的偏转角度,根据偏转角度将安全栓的空间数据修正,修正后的数据统一保留三位小数。
53.本发明实施例提供了一种压模机安全栓安全状态的识别算法,包括以下步骤:
54.步骤一、收集安全栓正常工作时的电压值数据库;
55.步骤二、将正常状态下的安全栓放置在压膜机的工作台上,计算此时通过安全栓的压力值,将安全栓安全状态下的电压值打上标签,标注为1,安全栓不安全状态下的电压值标注为0,并对所有的电压值进行分类,得到测试样本和训练样本;
56.步骤三、将步骤二中的安全栓继续向下移动穿过工作台直至安全栓的底面低于工作台台面的底面,
57.步骤四、将上述步骤中的安全栓旋转九十度;
58.步骤五、安全栓放置到位检测装置将安全栓是否放置在工作台上的信号传递给压力机的plc;
59.步骤六、在步骤三中,检测装置一处于接近开关一的检测范围内,接近开关一向plc发出信号,通过plc内编程设定,只有接近开关一有信号时代表安全栓已放置在工作台上;
60.步骤七、在安全栓旋转九十度时,另一个检测板转至与其相对应的接近开关上,接近开关检测到检测板并给压模机plc发出信号,代表安全栓已放置在工作台上,并且已经锁紧;
61.步骤八、静态背景模型建立与更新:
62.通过一秒左右的序列帧进行时域中值滤波获得静态背景模型,利用跟踪后结构更新静态模型,减少由于噪声引起场景变化对于目标检测效果的跟踪。
63.进一步,在得到安全栓的空间结构数据之后,在安全栓与工作台接触时,记录下此时数据,代表安全栓不安全时的数据,此时判断安全栓处于非正常状态,而且电压数值为1,统一记录下该数值,然后反复测试,得到最准备的数据。
64.进一步,步骤八中将帧间差法和背景检测的融合,利用三帧差值得到物体移动轮廓,三帧差值操作是为判定合法运动区域,然后利用背景减除法提取整个运动区域。
65.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。