半自动c型夹组装设备
技术领域
1.本实用新型涉及自动化设备技术领域,尤其涉及半自动c型夹组装设备。
背景技术:
2.c型夹的手柄呈c形,手柄上安装螺杆,可用于在木材加工过程中将板材固定,以及用于固定各种工件和模块。
3.c型夹组装时需要在手柄上安装螺杆,并在螺杆的端部铆压盖帽,现有技术中c型夹一般通过人工组装,组装效率低,缺少c型夹组装的自动化设备。
4.为解决上述问题,本技术中提出半自动c型夹组装设备。
技术实现要素:
5.一、实用新型目的
6.为解决背景技术中存在的技术问题,本实用新型提出半自动c型夹组装设备,具有可实现盖帽自动上料、定位、旋转、铆压、自动下料、掉料检测等,功能丰富,自动化程度高,有效提高手柄组装效率的特点。
7.二、技术方案
8.为解决上述技术问题,本实用新型提供了半自动c型夹组装设备,包括加工台、回转工作台和组装工位,所述回转工作台安装在加工台顶部,所述组装工位固定设置在回转工作台顶端,所述组装工位设置四个,四个所述组装工位在回转工作台上呈环形阵列分布,所述加工台前侧设置有螺纹组装台,所述回转工作台顶端两侧分别设有盖帽机械手和下料移载机械手,所述盖帽机械手上安装有铆压收口机构,所述加工台顶端两侧分别安装有伺服驱动模组a和伺服驱动模组b,所述伺服驱动模组a用于驱动盖帽机械手直线移动,所述伺服驱动模组b用于驱动下料移载机械手直线移动。
9.优选的,所述回转工作台采用四工位凸轮分割器驱动。
10.优选的,所述伺服驱动模组a和伺服驱动模组b均由伺服电机、滚珠丝杆和直线导轨结构组成。
11.优选的,所述螺纹组装台顶端设有旋转机构。
12.优选的,所述述加工台靠近盖帽机械手的一侧设置有盖帽振动盘。
13.优选的,所述加工台靠近下料移载机械手的一侧设置有导料板。
14.优选的,所述加工台一侧设置有液压站和电控箱,所述液压站用于为铆压收口机构提供液压动力。
15.优选的,所述加工台一侧设有预加工机构、传送带和固定框,所述固定框固定安装在加工台前侧,所述预加工机构和固定框分别设置在传送带的两端。
16.优选的,所述加工台前侧固定设置有急停开关。
17.优选的,所述盖帽机械手和下料移载机械手上均安装有掉料检测器。
18.本实用新型的上述技术方案具有如下有益的技术效果:
19.1、本实用新型的c型夹手柄人工上料,可实现盖帽自动上料、定位、旋转、铆压、自动下料、掉料检测等,功能丰富,自动化程度高,有效提高手柄组装效率;
20.2、本实用新型的各个设备部件布局合理,方便调试安装和维修维护。
附图说明
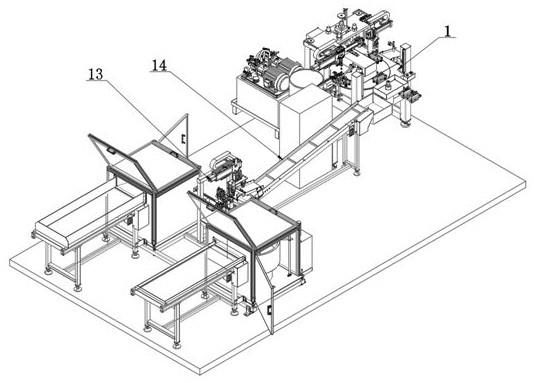
21.图1为本实用新型的整体结构示意图;
22.图2为本实用新型的图1的局部视图。
23.附图标记:1、加工台;2、回转工作台;3、组装工位;4、螺纹组装台;401、旋转机构;5、盖帽机械手;501、铆压收口机构;6、下料移载机械手;7、伺服驱动模组a;8、伺服驱动模组b;9、导料板;10、液压站;11、电控箱;12、急停开关;13、预加工机构;14、传送带;15、固定框;16、盖帽振动盘。
具体实施方式
24.为使本实用新型的目的、技术方案和优点更加清楚明了,下面结合具体实施方式并参照附图,对本实用新型进一步详细说明。应该理解,这些描述只是示例性的,而并非要限制本实用新型的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本实用新型的概念。
25.如图1-2所示,本实用新型提出的半自动c型夹组装设备,包括加工台1、回转工作台2和组装工位3,回转工作台2安装在加工台1顶部,组装工位3固定设置在回转工作台2顶端,组装工位3设置四个,四个组装工位3在回转工作台2上呈环形阵列分布,加工台1前侧设置有螺纹组装台4,回转工作台2顶端两侧分别设有盖帽机械手5和下料移载机械手6,盖帽机械手5上安装有铆压收口机构501,加工台1顶端两侧分别安装有伺服驱动模组a7和伺服驱动模组b8,伺服驱动模组a7用于驱动盖帽机械手5直线移动,伺服驱动模组b8用于驱动下料移载机械手6直线移动。
26.需要说明的是,组装时,c型夹手柄半成品由人工上料,工人在螺纹组装台4处将手柄半成品与螺杆螺纹装配,螺纹组装台4顶端设有旋转机构401,旋转机构401速度可调,用于帮助旋转螺杆,放置在螺纹组装台4上,便于人工操作,手柄螺纹组装完成后工人将其放置到组装工位3上,回转工作台2采用四工位凸轮分割器驱动,回转工作台2带动组装工位3旋转至盖帽机械手5下方,加工台1靠近盖帽机械手5的一侧设置有盖帽振动盘16,将盖帽导入盖帽振动盘16内,自动排列出料,盖帽机械手5抓取盖帽后,由铆压收口机构501将盖帽铆压到螺杆上完成组装,组装工位3继续旋转至下料移载机械手6下方,加工台1靠近下料移载机械手6的一侧设置有导料板9,下料移载机械手6将组装完成后的手柄抓取至导料板9上完成下料。
27.如图2所示,伺服驱动模组a7和伺服驱动模组b8均由伺服电机、滚珠丝杆和直线导轨结构组成,伺服驱动模组a7和伺服驱动模组b8分别用于驱动盖帽机械手5和下料移载机械手6横移,具有良好的稳定性,盖帽机械手5和下料移载机械手6上均安装有掉料检测器,掉料检测器主要由光电传感器组成,用于检测物料是否在机械手上,加工台1前侧固定设置有急停开关12,在发生异常情况下可按下急停开关12,急停开关12位于螺纹组装台4一侧,方便工人按压操作。
28.如图2所示,加工台1一侧设置有液压站10和电控箱11,液压站10用于为铆压收口机构501提供液压动力,液压站10压力7mpa,铆压收口机构501的油缸缸径不小于100。
29.如图1-2所示,加工台1一侧设有预加工机构13、传送带14和固定框15,固定框15固定安装在加工台1前侧,预加工机构13和固定框15分别设置在传送带14的两端,预加工机构13用于将手柄进行预加工,预加工完成后通过传送带14传送至固定框15内,方便工人拿取。
30.工作原理:c型夹手柄半成品由人工上料,工人在螺纹组装台4处将手柄半成品与螺杆螺纹装配,旋转机构401速度可调,用于帮助旋转螺杆,手柄螺纹组装完成后工人将其放置到组装工位3上,回转工作台2采用四工位凸轮分割器驱动,回转工作台2带动组装工位3旋转至盖帽机械手5下方,将盖帽导入盖帽振动盘16内,自动排列出料,盖帽机械手5抓取盖帽后,由铆压收口机构501将盖帽铆压到螺杆上完成组装,组装工位3继续旋转至下料移载机械手6下方,加工台1靠近下料移载机械手6的一侧设置有导料板9,下料移载机械手6将组装完成后的手柄抓取至导料板9上完成下料。
31.应当理解的是,本实用新型的上述具体实施方式仅仅用于示例性说明或解释本实用新型的原理,而不构成对本实用新型的限制。因此,在不偏离本实用新型的精神和范围的情况下所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。此外,本实用新型所附权利要求旨在涵盖落入所附权利要求范围和边界、或者这种范围和边界的等同形式内的全部变化和修改例。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。