1.本发明涉及曲轴生产加工装置技术领域,具体为一种曲轴生产用钻孔深度限位装置。
背景技术:
2.曲轴斜油孔是曲轴机加工的重要工序之一,作为润滑油的通道,起润滑作用,曲轴箱里面的机油进入油道,进入连杆颈主轴颈,润滑轴瓦与曲轴接触部分,在曲轴加工生产中,对钻孔要求特别高,对孔的深度要求需要很准确,否则容易直接导致发动机受力不均有异响。
3.目前曲轴在钻孔时依靠机械臂钻头打孔,同时机械臂自带冷却清洗液,但是由于钻孔时角度复杂,一些碎屑难以排除曲轴的空洞,导致后续环节不能进行,同时曲轴本身材质硬度很高,钻头在钻孔时依靠机械臂的冷却液,很难快速将其摩擦产生的温度降下来,并且现有的钻孔装置在深度定位时依靠机械臂内部程序判断,操作人员无法观测钻孔深度。
技术实现要素:
4.(一)解决的技术问题针对现有技术的不足,本发明提供了一种曲轴生产用钻孔深度限位装置,具备快速排出孔洞内碎屑,对打完孔的曲轴进行全面冷却,可以辅助操作人员观察打孔深度情况等优点,解决了上述技术的问题。
5.技术方案为实现上述目的,本发明提供如下技术方案:一种曲轴生产用钻孔深度限位装置,包括装置主体、钻孔装置、限位装置、定位装置、联动装置和清理装置,所述装置主体前壁设置联通其内侧的开口,所述装置主体内侧顶部设置钻孔装置,所述钻孔装置包括液压杆、无杆气缸和机械臂,所述液压杆安装于装置主体内侧顶面并输出端朝下,所述无杆气缸顶部中端连接液压杆输出端,所述机械臂活动安装于无杆气缸下方输出端,所述限位装置设置于机械臂后方,所述限位装置包括伸缩杆、连杆、尺杆、刻度尺和感应器,所述伸缩杆首端连接机械臂后壁,所述伸缩杆尾端连接连杆,所述连杆贯穿装置主体并尾端连接尺杆,所述尺杆侧边并位于装置主体侧壁设置刻度尺,所述刻度尺正前方并位于装置主体侧壁中端设置连接机械臂的感应器,所述定位装置设置于装置主体内侧两端,所述定位装置包括滑块、滑槽、竖杆和转轴卡扣,所述滑块设置于无杆气缸两端,所述滑块尾端滑接设置于装置主体内侧的滑槽,所述滑槽内侧设置竖杆,所述竖杆顶部设置转轴卡扣,所述联动装置设置于定位装置底部,所述联动装置包括缓冲槽和复位弹簧,所述缓冲槽设置于滑槽底部并内侧设置复位弹簧,所述清理装置设置于装置主体内侧底部,所述清理装置包括清理池和定位台,所述清理池安装于装置主体内侧底部,所述定位台位于清理池上方并两端插接缓冲槽。
6.优选的,所述开口开设于装置主体前壁,所述开口后方联通装置主体内部。
7.通过上述技术方案,通过开口用于上下料,将曲轴从开口放入装置主体内部进行
打孔。
8.优选的,所述液压杆底面还设置连接块,所述连接块设置于液压杆与无杆气缸连接处。
9.通过上述技术方案,连接块用于缓冲液压杆与无杆气缸,避免液压杆硬拉损坏无杆气缸,液压杆为现有常见的数控电动伸缩杆,其中液压杆与无杆气缸均为数控设备,为现有机床plc程序控制器所控制,进一步的液压杆伸缩控制无杆气缸在装置主体内部高度。
10.优选的,所述无杆气缸平行于装置主体内侧,所述机械臂尾端固定连接无杆气缸输出端,所述机械臂底部设置钻头。
11.通过上述技术方案,通过无杆气缸启动后控制机械臂直线往返运动,其中机械臂为现有钻孔用自动化机械臂,属于现有设备,进一步的在液压杆启动下移后,带动机械臂接触被固定的曲轴进行打孔操作。
12.优选的,所述伸缩杆首端固定连接机械臂后壁,所述伸缩杆尾端侧边固定连接连杆,所述连杆贯穿并滑动连接装置主体侧壁,所述尺杆与机械臂底部钻头同一水平线,所述尺杆对位于刻度尺顶部,所述感应器固定安装于装置主体侧壁中端并感应端对位于刻度尺,所述感应器电路连接机械臂输入端。
13.通过上述技术方案,通过机械臂在被液压杆带动下移同时,伸缩杆随着机械臂同时下移,进一步的带动尾端的连杆,通过连杆下移同时带动尺杆移动,当尺杆移动其侧边在刻度尺表面移动,从而使得操作人员可以观察具体数据,此时感应器开始接受数据,并在到达设定至后,由感应器感应端发出指令停止机械臂钻孔,同时感应器为现有的感应装置。
14.优选的,所述滑块对称安装于无杆气缸两端,所述滑块尾端滑动连接竖杆,所述滑块与竖杆连接处设置供竖杆通行的通孔,所述转轴卡扣为内侧设置扭簧并外表面设置横杆的转轴,所述转轴卡扣侧边的横杆平行于滑块底面。
15.通过上述技术方案,通过无杆气缸下移时两侧的滑块在滑槽内侧同步移动,并滑接于竖杆外表面,进一步的在滑块接触到转轴卡扣时,首先转轴卡扣侧边横杆挡住滑块,随着滑块继续下移压迫转轴卡扣和竖杆,从而将竖杆下压,并在转轴卡扣横杆被下压至向下垂直时,无杆气缸的滑块通过转轴卡扣并继续下移。
16.优选的,所述缓冲槽开设于滑槽底部,所述缓冲槽内侧底部安装复位弹簧,所述复位弹簧顶面连接定位台底面。
17.通过上述技术方案,通过竖杆下移时底部带动定位台同步下移,此时定位台两端在缓冲槽内侧下压,同时随着定位台下移压迫复位弹簧。
18.优选的,所述清理池固定安装于装置主体内侧底面,所述定位台两端滑动连接缓冲槽并与竖杆底部固定连接。
19.通过上述技术方案,通过定位台下移整体浸入清理池,此时清理池内部的冷却液浸没定位台,将定位台以及其固定的曲轴同时冷却,并在冷却液冲刷下,同时带走孔洞内碎屑,进一步的滑块通过转轴卡扣后,竖杆在复位弹簧带动下上移复位,在机械臂到来前顶起定位台,使其进行钻孔。
20.与现有技术相比,本发明提供了一种曲轴生产用钻孔深度限位装置,具备以下有益效果:1、该曲轴生产用钻孔深度限位装置,通过定位台下移整体浸入清理池,此时清理
池内部的冷却液浸没定位台,将定位台以及其固定的曲轴同时冷却,并在冷却液冲刷下,同时带走孔洞内碎屑,达到了快速排出孔洞内碎屑的有益效果。
21.2、该曲轴生产用钻孔深度限位装置,通过定位台下移整体浸入清理池,此时清理池内部的冷却液浸没定位台,将定位台以及其固定的曲轴同时冷却,达到了对打完孔的曲轴进行全面冷却的有益效果。
22.3、该曲轴生产用钻孔深度限位装置,通过机械臂在被液压杆带动下移同时,伸缩杆随着机械臂同时下移,进一步的带动尾端的连杆,通过连杆下移同时带动尺杆移动,当尺杆移动其侧边在刻度尺表面移动,从而使得操作人员可以观察具体数据,达到了可以辅助操作人员观察打孔深度情况的有益效果。
附图说明
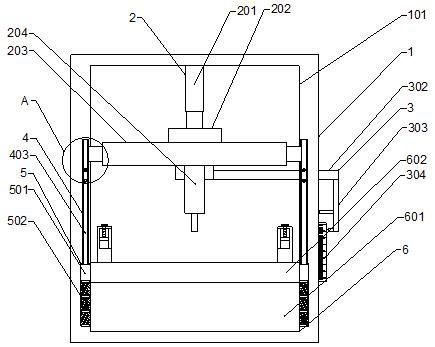
23.图1为本发明整体结构正剖示意图;图2为本发明整体结构侧视示意图;图3为本发明限位装置结构俯视示意图;图4为本发明伸缩杆结构立体示意图;图5为本发明竖杆结构立体示意图;图6为图1中a的放大示意图。
24.其中:1、装置主体;101、开口;2、钻孔装置;201、液压杆;202、连接块;203、无杆气缸;204、机械臂;3、限位装置;301、伸缩杆;302、连杆;303、尺杆;304、刻度尺;305、感应器;4、定位装置;401、滑块;402、滑槽;403、竖杆;404、转轴卡扣;5、联动装置;501、缓冲槽;502、复位弹簧;6、清理装置;601、清理池;602、定位台。
具体实施方式
25.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
26.请参阅图1-6,一种曲轴生产用钻孔深度限位装置,包括装置主体1、钻孔装置2、限位装置3、定位装置4、联动装置5和清理装置6,装置主体1前壁设置联通其内侧的开口101,装置主体1内侧顶部设置钻孔装置2,钻孔装置2包括液压杆201、无杆气缸203和机械臂204,液压杆201安装于装置主体1内侧顶面并输出端朝下,无杆气缸203顶部中端连接液压杆201输出端,机械臂204活动安装于无杆气缸203下方输出端,限位装置3设置于机械臂204后方,限位装置3包括伸缩杆301、连杆302、尺杆303、刻度尺304和感应器305,伸缩杆301首端连接机械臂204后壁,伸缩杆301尾端连接连杆302,连杆302贯穿装置主体1并尾端连接尺杆303,尺杆303侧边并位于装置主体1侧壁设置刻度尺304,刻度尺304正前方并位于装置主体1侧壁中端设置连接机械臂204的感应器305,定位装置4设置于装置主体1内侧两端,定位装置4包括滑块401、滑槽402、竖杆403和转轴卡扣404,滑块401设置于无杆气缸203两端,滑块401尾端滑接设置于装置主体1内侧的滑槽402,滑槽402内侧设置竖杆403,竖杆403顶部设置转轴卡扣404,联动装置5设置于定位装置4底部,联动装置5包括缓冲槽501和复位弹簧502,缓
冲槽501设置于滑槽402底部并内侧设置复位弹簧502,清理装置6设置于装置主体1内侧底部,清理装置6包括清理池601和定位台602,清理池601安装于装置主体1内侧底部,定位台602位于清理池601上方并两端插接缓冲槽501。
27.具体的,开口101开设于装置主体1前壁,开口101后方联通装置主体1内部,优点是通过开口101用于上下料,将曲轴从开口101放入装置主体1内部进行打孔。
28.具体的,液压杆201底面还设置连接块202,连接块202设置于液压杆201与无杆气缸203连接处,优点是连接块202用于缓冲液压杆201与无杆气缸203,避免液压杆201硬拉损坏无杆气缸203,液压杆201为现有常见的数控电动伸缩杆,其中液压杆201与无杆气缸203均为数控设备,为现有机床plc程序控制器所控制,进一步的液压杆201伸缩控制无杆气缸203在装置主体1内部高度。
29.具体的,无杆气缸203平行于装置主体1内侧,机械臂204尾端固定连接无杆气缸203输出端,机械臂204底部设置钻头,优点是通过无杆气缸203启动后控制机械臂204直线往返运动,其中机械臂204为现有钻孔用自动化机械臂,属于现有设备,进一步的在液压杆201启动下移后,带动机械臂204接触被固定的曲轴进行打孔操作。
30.具体的,伸缩杆301首端固定连接机械臂204后壁,伸缩杆301尾端侧边固定连接连杆302,连杆302贯穿并滑动连接装置主体1侧壁,尺杆303与机械臂204底部钻头同一水平线,尺杆303对位于刻度尺304顶部,感应器305固定安装于装置主体1侧壁中端并感应端对位于刻度尺304,感应器305电路连接机械臂204输入端,优点是通过机械臂204在被液压杆201带动下移同时,伸缩杆301随着机械臂204同时下移,进一步的带动尾端的连杆302,通过连杆302下移同时带动尺杆303移动,当尺杆303移动其侧边在刻度尺304表面移动,从而使得操作人员可以观察具体数据,此时感应器305开始接受数据,并在到达设定至后,由感应器305感应端发出指令停止机械臂204钻孔,同时感应器305为现有的感应装置。
31.具体的,滑块401对称安装于无杆气缸203两端,滑块401尾端滑动连接竖杆403,滑块401与竖杆403连接处设置供竖杆403通行的通孔,转轴卡扣404为内侧设置扭簧并外表面设置横杆的转轴,转轴卡扣404侧边的横杆平行于滑块401底面,优点是通过无杆气缸203下移时两侧的滑块401在滑槽402内侧同步移动,并滑接于竖杆403外表面,进一步的在滑块401接触到转轴卡扣404时,首先转轴卡扣404侧边横杆挡住滑块401,随着滑块401继续下移压迫转轴卡扣404和竖杆403,从而将竖杆403下压,并在转轴卡扣404横杆被下压至向下垂直时,无杆气缸203的滑块401通过转轴卡扣404并继续下移。
32.具体的,缓冲槽501开设于滑槽402底部,缓冲槽501内侧底部安装复位弹簧502,复位弹簧502顶面连接定位台602底面,优点是通过竖杆403下移时底部带动定位台602同步下移,此时定位台602两端在缓冲槽501内侧下压,同时随着定位台602下移压迫复位弹簧502。
33.具体的,清理池601固定安装于装置主体1内侧底面,定位台602两端滑动连接缓冲槽501并与竖杆403底部固定连接,优点是通过定位台602下移整体浸入清理池601,此时清理池601内部的冷却液浸没定位台602,将定位台602以及其固定的曲轴同时冷却,并在冷却液冲刷下,同时带走孔洞内碎屑,进一步的滑块401通过转轴卡扣404后,竖杆403在复位弹簧502带动下上移复位,在机械臂204到来前顶起定位台602,使其进行钻孔。
34.在使用时,将曲轴从开口101放入装置主体1内部,液压杆201启动下移,机械臂204在被液压杆201带动下移同时,伸缩杆301随着机械臂204同时下移,进一步的带动尾端的连
杆302,通过连杆302下移同时带动尺杆303移动,当尺杆303移动其侧边在刻度尺304表面移动,从而使得操作人员可以观察具体数据,无杆气缸203下移时两侧的滑块401在滑槽402内侧同步移动,并滑接于竖杆403外表面,进一步的在滑块401接触到转轴卡扣404时,首先转轴卡扣404侧边横杆挡住滑块401,随着滑块401继续下移压迫转轴卡扣404和竖杆403,从而将竖杆403下压,并在转轴卡扣404横杆被下压至向下垂直时,无杆气缸203的滑块401通过转轴卡扣404并继续下移,通过竖杆403下移时底部带动定位台602同步下移,此时定位台602两端在缓冲槽501内侧下压,定位台602下移整体浸入清理池601,此时清理池601内部的冷却液浸没定位台602,将定位台602以及其固定的曲轴同时冷却,并在冷却液冲刷下,同时带走孔洞内碎屑,进一步的滑块401通过转轴卡扣404后,竖杆403在复位弹簧502带动下上移复位,在机械臂204到来前顶起定位台602,使其进行钻孔。
35.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
