1.本发明涉及一种车辆用转向装置。
背景技术:
2.作为车辆用转向装置,存在一种由驾驶员进行转向的转向反作用力生成装置(ffa:force feedback actuator(力反馈致动器)、转向机构)与进行车辆的转舵的轮胎转轮装置(rwa:road wheel actuator(车轮致动器)、转轮机构)机械地分离的线控转向(sbw:steer by wire)式的车辆用转向装置。这种sbw式的车辆用转向装置通常为以下结构:转向机构与转轮机构经由控制单元(ecu:electronic control unit:电子控制单元)电连接,通过电信号来进行转向机构与转轮机构之间的控制。与此相对地,在sbw式的车辆用转向装置中,考虑利用各不相同的ecu来控制转向机构和转轮机构的结构(例如,专利文献1)。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2006-218992号公报
技术实现要素:
6.发明要解决的问题
7.另外,关于车辆系统,要求用于实现各部发生异常时的继续运转、安全停止等故障保护功能的高冗余性。特别是在转向机构与转轮机构被机械地分离且针对转向机构和转轮机构具有互不相同的ecu的sbw式的车辆用转向装置中,例如当各ecu间的通信系统发生故障时,车辆有可能陷入无法转向状态。另一方面,使各种传感器、控制系统、通信系统等各主要部分多重化等对冗余性的过度确保有可能导致制造成本的增加。
8.本发明是鉴于上述问题而完成的,其目的在于提供一种能够以简单的结构实现车辆系统的故障保护功能的车辆用转向装置。
9.用于解决问题的方案
10.为了实现上述目的,本发明的一个方式所涉及的车辆用转向装置具备:反作用力装置,其对方向盘施加转向反作用力;驱动装置,其根据所述方向盘的转向来使轮胎转动;第一控制部,其控制所述反作用力装置;第二控制部,其控制所述驱动装置;多个转向角传感器,所述多个转向角传感器检测所述方向盘的转向角并输出到所述第二控制部;以及通信系统,其至少将所述多个转向角传感器的检测值即所述方向盘的转向角中的一个转向角从所述第二控制部传送到所述第一控制部,其中,所述第二控制部将所述多个转向角传感器的检测值中的某个检测值作为所述方向盘的转向角来控制所述驱动装置,并且经由所述通信系统输出到所述第一控制部,所述第一控制部基于经由所述通信系统从所述第二控制部输入的所述方向盘的转向角来控制所述反作用力装置。
11.根据上述结构,能够利用多个转向角传感器确保针对方向盘的转向角的冗余性。另外,通过将转向角传感器的检测值输入到控制驱动装置的第二控制部,即使与控制反作
用力装置的第一控制部之间的通信系统发生故障,也能够通过驱动装置继续运转,能够以简单的结构实现车辆系统的故障保护功能。
12.作为车辆用转向装置的优选方式,优选的是,所述多个转向角传感器包括第一转向角传感器和第二转向角传感器,所述第二控制部在接收到所述第一转向角传感器的检测值的情况下,将该检测值作为所述方向盘的转向角来控制所述驱动装置,并且经由所述通信系统输出到所述第一控制部,所述第二控制部在无法接收所述第一转向角传感器的检测值的情况下,将所述第二转向角传感器的检测值作为所述方向盘的转向角来控制所述驱动装置,并且经由所述通信系统输出到所述第一控制部。
13.由此,能够根据由第一转向角传感器和第二转向角传感器中的某个转向角传感器检测到的方向盘的转向角来进行车辆的控制。
14.作为车辆用转向装置的优选方式,优选的是,所述第一控制部在无法接收所述方向盘的转向角或者所述通信系统发生故障的情况下,进行规定的异常时处理。
15.作为第一控制部的异常时处理,例如使反作用力装置的转向反作用力控制功能停止,并且向驾驶者通知停止了转向反作用力控制功能。由此,能够实现车辆系统的故障保护功能。
16.作为车辆用转向装置的优选方式,优选的是,所述第二控制部在无法接收所述多个转向角传感器的所有检测值的情况下,进行规定的异常时处理。
17.作为第二控制部的异常时处理,例如进行与自动驾驶水平相应的安全停止处理,并且向驾驶者通知转向角检测功能发生故障。由此,能够实现更安全的车辆系统的故障保护功能。
18.发明的效果
19.根据本发明,能够提供一种能够以简单的结构实现车辆系统的故障保护功能的车辆用转向装置。
附图说明
20.图1是示出线控转向式的车辆用转向装置的整体结构的图。
21.图2是示出控制sbw系统的控制单元的硬件结构的示意图。
22.图3是示出控制单元的内部模块结构的一例的图。
23.图4是示出扭转角控制部的一个结构例的框图。
24.图5是示出目标转轮角生成部的一个结构例的框图。
25.图6是示出转轮角控制部的一个结构例的框图。
26.图7是示出转轮角控制部的动作例的流程图。
27.图8是示出实施方式所涉及的线控转向式的车辆用转向装置的系统概要结构的一例的图。
28.图9是示出比较例所涉及的线控转向式的车辆用转向装置的系统概要结构的一例的图。
29.图10是示出第一ecu和第二ecu的内部功能模块的一例的图。
30.图11是示出第二ecu的处理流程的一例的流程图。
31.图12是示出第一ecu的处理流程的一例的流程图。
具体实施方式
32.下面,参照附图来详细地说明用于实施发明的方式(以下,称为实施方式)。此外,本发明并不限定于下述的实施方式。另外,在下述实施方式的构成要素中包括本领域技术人员容易想到的要素、实质上相同的要素、所谓的均等范围的要素。并且,在下述实施方式中公开的构成要素能够适当地组合。
33.图1是示出线控转向式的车辆用转向装置的整体结构的图。图1所示的线控转向(sbw:steer by wire)式的车辆用转向装置(以下,也称为“sbw系统”)是具备反作用力装置60和驱动装置70且通过电信号将方向盘1的操作传递给包括转向车轮8l、8r等的转轮机构的系统。在此,为了说明sbw系统的具体动作,例示了作为控制部的控制单元(ecu)50对反作用力装置60和驱动装置70这两个装置进行控制的结构。
34.反作用力装置60具备减速机构3和反作用力用马达61等。这些各结构部设置于方向盘1的转向柱2。
35.另外,在方向盘1的转向柱2设置有用于检测方向盘1的转向转矩ts的转矩传感器10、用于检测转向角θh的转向角传感器14等。
36.反作用力装置60将从转向车轮8l、8r传递来的车辆的运动状态作为反作用力转矩传达给驾驶员。反作用力转矩由反作用力用马达61生成。
37.在sbw系统中还存在不具有扭杆的类型,但图1所示的sbw系统是具有扭杆的类型,通过转矩传感器10来检测转向转矩ts。另外,角度传感器74检测反作用力用马达61的马达角θm。
38.驱动装置70具备驱动用马达71和齿轮72等。由驱动用马达71产生的驱动力经由齿轮72、齿轮齿条机构5、转向横拉杆6a、6b,进而经由轮毂单元7a、7b而与转向车轮8l、8r连结。
39.驱动装置70根据驾驶员对方向盘1进行的转向操作来对驱动用马达71进行驱动,并经由齿轮72对齿轮齿条机构5施加该驱动力,经由转向横拉杆6a、6b使转向车轮8l、8r转动。ecu 50除了基于从两个装置输出的转向角θh、转轮角θt等信息以外,还基于来自车速传感器12的车速vs等生成用于对反作用力用马达61进行驱动控制的电压控制指令值vref1和用于对驱动用马达71进行驱动控制的电压控制指令值vref2,以对反作用力装置60和驱动装置70进行协调控制。
40.另外,在齿轮齿条机构5的附近配置有用于检测转向车轮8l、8r的转轮角θt的角度传感器73。
41.从电池13向控制单元(ecu)50供给电力,并且经由点火钥匙11输入点火钥匙信号。控制单元50基于由转矩传感器10检测出的转向转矩ts和由车速传感器12检测出的车速vs进行电流指令值的运算,来控制向反作用力用马达61和驱动用马达71供给的电流。
42.针对控制单元50连接有用于发送和接收车辆的各种信息的can(controller area network:控域网)40等车载网络。另外,也能够针对控制单元30连接用于进行can 40以外的通信、发送和接收模拟/数字信号、电波等的非can 40a。
43.控制单元50主要由cpu(也包括mcu、mpu等)构成。图2是示出控制sbw系统的控制单元的硬件结构的示意图。
44.构成控制单元50的控制用计算机1100具备cpu(central processing unit:中央
处理单元)1001、rom(read only memory:只读存储器)1002、ram(random access memory:随机存取存储器)1003、eeprom(electrically erasable programmable rom:电可擦除可编程只读存储器)1004、接口(i/f)1005、a/d(analog/digital:模拟/数字)转换器1006、pwm(pulse width modulation:脉宽调制)控制器1007等,它们与总线连接。
45.cpu 1001是执行sbw系统的控制用计算机程序(以下,称为控制程序)来控制sbw系统的处理装置。
46.rom 1002保存用于控制sbw系统的控制程序。另外,ram 1003作为用于使控制程序运行的工作存储器来使用。在eeprom 1004中保存有由控制程序输入输出的控制数据等。控制数据使用于在对控制单元30接通电源后在ram 1003中展开的控制用计算机程序中,在规定的定时在eeprom 1004中被覆盖。
47.rom 1002、ram 1003以及eeprom 1004等是用于保存信息的存储装置,是cpu 1001能够直接访问的存储装置(一次存储装置)。
48.a/d转换器1006被输入转向转矩ts和转向角θh的信号等,并将它们转换为数字信号。
49.接口1005连接于can 40。接口1005用于接收来自车速传感器12的车速v的信号(车速脉冲)。
50.pwm控制器1007基于针对反作用力用马达61和驱动用马达71的电流指令值来输出uvw各相的pwm控制信号。
51.图3是示出控制单元的内部模块结构的一例的图。在本实施方式中,进行针对扭转角δθ的控制(以下,称为“扭转角控制”)和针对转轮角θt的控制(以下,称为“转轮角控制”),通过扭转角控制来控制反作用力装置,通过转轮角控制来控制驱动装置。此外,也可以用其它控制方法来控制驱动装置。
52.控制单元50具备目标转向转矩生成部200、扭转角控制部300、转换部500、目标转轮角生成部910以及转轮角控制部920,来作为内部模块结构。
53.目标转向转矩生成部200生成目标转向转矩tref,该目标转向转矩tref是在本公开中对车辆的转向系统进行辅助控制时的转向转矩的目标值。转换部500将目标转向转矩tref转换为目标扭转角δθref。扭转角控制部300生成马达电流指令值imc,该马达电流指令值imc是向反作用力马达61供给的电流的控制目标值。
54.在扭转角控制中,进行如下控制:使扭转角δθ追随由目标转向转矩生成部200和转换部500使用转向角θh等计算出的目标扭转角δθref。利用角度传感器74来检测反作用力马达61的马达角θm,通过角速度运算部951对马达角θm进行微分,由此计算马达角速度ωm。利用角度传感器73来检测驱动用马达71的转轮角θt。另外,电流控制部130基于从扭转角控制部300输出的马达电流指令值imc和由马达电流检测器140检测出的反作用力用马达61的电流值imr对反作用力用马达61进行驱动,来进行电流控制。
55.下面,参照图4来说明扭转角控制部300。
56.图4是示出扭转角控制部的一个结构例的框图。扭转角控制部300基于目标扭转角δθref、扭转角δθ以及马达角速度ωm来运算马达电流指令值imc。扭转角控制部300具备扭转角反馈(fb)补偿部310、扭转角速度运算部320、速度控制部330、稳定化补偿部340、输出限制部350、减法部361以及加法部362。
57.从转换器500输出的目标扭转角δθref被以相加的形式输入到减法部361。扭转角δθ被以相减的形式输入到减法部361,并且被输入到扭转角速度运算部320。马达角速度ωm被输入到稳定化补偿部340。
58.扭转角反馈补偿部310对由减法部361计算出的、目标扭转角δθref与扭转角δθ的偏差δθ0乘以补偿值cfb(传递函数),并输出使扭转角δθ追随目标扭转角δθref那样的目标扭转角速度ωref。补偿值cfb既可以是简单的增益kpp,也可以是pi控制的补偿值等通常使用的补偿值。
59.目标扭转角速度ωref被输入到速度控制部330。通过扭转角反馈补偿部310和速度控制部330,能够使扭转角δθ追随目标扭转角δθref,从而实现期望的转向转矩。
60.扭转角速度运算部320对扭转角δθ进行微分运算处理,来计算扭转角速度ωt。扭转角速度ωt被输出到速度控制部330。扭转角速度运算部320也可以进行基于hpf和增益的模拟微分,来作为微分运算。另外,扭转角速度运算部320也可以通过其它方式、根据扭转角δθ以外的参数来计算扭转角速度ωt,并输出到速度控制部330。
61.速度控制部330通过i-p控制(比例先行型pi控制)来计算使扭转角速度ωt追随目标扭转角速度ωref那样的马达电流指令值imca1。
62.减法部333计算目标扭转角速度ωref与扭转角速度ωt之差(ωref-ωt)。积分部331对目标扭转角速度ωref与扭转角速度ωt之差(ωref-ωt)进行积分,并将积分结果以相加的形式输入到减法部334。
63.扭转角速度ωt也被输出到比例部332。比例部332对扭转角速度ωt进行基于增益kvp的比例处理,并将比例处理结果以相减的形式输入到减法部334。减法部334中的减法运算结果作为马达电流指令值imca1被输出。此外,速度控制部330也可以不通过i-p控制,而通过pi控制、p(比例)控制、pid(比例积分微分)控制、pi-d控制(微分先行型pid控制)、模型匹配控制、模型规范控制等通常使用的控制方法来计算马达电流指令值imca1。
64.稳定化补偿部340具有补偿值cs(传递函数),根据马达角速度ωm来计算马达电流指令值imca2。如果为了提高追随性和干扰特性而提高扭转角反馈补偿部310和速度控制部330的增益,则会产生高频的可控的振荡现象。作为其对策,在稳定化补偿部340中设定使马达角速度ωm稳定化所需要的传递函数(cs)。由此,能够实现eps控制系统整体的稳定化。
65.加法部362将来自速度控制部330的马达电流指令值imca1与来自稳定化补偿部340的马达电流指令值imca2相加,并作为马达电流指令值imcb输出。
66.输出限制部350预先设定了针对马达电流指令值imcb的上限值和下限值。输出限制部350限制马达电流指令值imcb的上下限值,来输出马达电流指令值imc。
67.此外,本实施方式中的扭转角控制部300的结构是一例,也可以是与图4所示的结构不同的方式。例如,扭转角控制部300也可以是不具备稳定化补偿部340的结构。
68.在转轮角控制中,由目标转轮角生成部910基于转向角θh来生成目标转轮角θtref。目标转轮角θtref与转轮角θt被一起输入到转轮角控制部920,由转轮角控制部920运算使转轮角θt成为目标转轮角θtref那样的马达电流指令值imct。而且,电流控制部930基于马达电流指令值imct和由马达电流检测器940检测出的驱动用马达71的电流值imd,通过与电流控制部130相同的结构及动作对驱动用马达71进行驱动,来进行电流控制。
69.下面,参照图5来说明目标转轮角生成部910。
70.图5是示出目标转轮角生成部的一个结构例的框图。目标转轮角生成部910具备限制部931、比率限制部932以及校正部933。
71.限制部931输出限制了转向角θh的上下限值的转向角θh1。与图4所示的扭转角控制部300内的输出限制部350同样地,预先设定针对转向角θh的上限值和下限值来施加限制。
72.比率限制部932对转向角θh1的变化量设定限制值来施加限制来输出转向角θh2,以避免转向角的急剧变化。例如,将与前一次采样的转向角θh1之差设为变化量,在该变化量的绝对值比规定的值(限制值)大的情况下,以使变化量的绝对值成为限制值的方式对转向角θh1进行加减法运算,并作为转向角θh2输出,在变化量的绝对值为限制值以下的情况下,将转向角θh1直接作为转向角θh2输出。此外,也可以是,不针对变化量的绝对值设定限制值,针对变化量设定上限值和下限值来施加限制,也可以不针对变化量而针对变化率、差异率施加限制。
73.校正部933对转向角θh2进行校正,来输出目标转轮角θtref。
74.下面,参照图6来说明转轮角控制部920。
75.图6是示出转轮角控制部的一个结构例的框图。转轮角控制部920基于目标转轮角θtref以及转向车轮8l、8r的转轮角θt来运算马达电流指令值imct。转轮角控制部920具备转轮角反馈(fb)补偿部921、转轮角速度运算部922、速度控制部923、输出限制部926以及减法部927。
76.从目标转轮角生成部910输出的目标转轮角θtref被以相加的形式输入到减法部927。转轮角θt被以相减的形式输入到减法部927,并且被输入到转轮角速度运算部922。
77.转轮角反馈补偿部921对由减法部927计算出的、目标转轮角速度ωtref与转轮角θt的偏差δθt0乘以补偿值cfb(传递函数),来输出使转轮角θt追随目标转轮角θtref那样的目标转轮角速度ωtref。补偿值cfb既可以是简单的增益kpp,也可以是pi控制的补偿值等通常使用的补偿值。
78.目标转轮角速度ωtref被输入到速度控制部923。通过转轮角反馈补偿部921和速度控制部923,能够使转轮角θt追随目标转轮角θtref,从而实现期望的转矩。
79.转轮角速度运算部922对转轮角θt进行微分运算处理,来计算转轮角速度ωtt。转轮角速度ωtt被输出到速度控制部923。速度控制部923也可以进行基于hpf和增益的模拟微分,来作为微分运算。另外,速度控制部923也可以通过其它方式、根据转轮角θt以外的参数来计算转轮角速度ωtt,并输出到速度控制部923。
80.速度控制部923通过i-p控制(比例先行型pi控制)来计算使转轮角速度ωtt追随目标转轮角速度ωtref那样的马达电流指令值imcta。此外,速度控制部923也可以不通过i-p控制,而通过pi控制、p(比例)控制、pid(比例积分微分)控制、pi-d控制(微分先行型pid控制)、模型匹配控制、模型规范控制等通常使用的控制方法来计算马达电流指令值imcta。
81.减法部928计算目标转轮角速度ωtref与转轮角速度ωtt之差(ωtref-ωtt)。积分部924对目标转轮角速度ωtref与转轮角速度ωtt之差(ωtref-ωtt)进行积分,并将积分结果以相加的形式输入到减法部929。
82.转轮角速度ωtt也被输出到比例部925。比例部925对转轮角速度ωtt进行比例处理,并将比例处理结果作为马达电流指令值imcta输出到输出限制部926。
83.输出限制部926预先设定了针对马达电流指令值imcta的上限值和下限值。输出限制部926限制马达电流指令值imcta的上下限值,来输出马达电流指令值imct。
84.此外,本实施方式中的转轮角控制部920的结构是一例,也可以是与图6所示的结构不同的方式。
85.在这样的结构中,参照图7的流程图来说明转轮角控制部的动作例。图7是示出转轮角控制部的动作例的流程图。
86.当开始进行动作时,角度传感器73检测转轮角θt,角度传感器74检测马达角θm(步骤s110),转轮角θt被输入到转轮角控制部920,马达角θm被输入到角速度运算部951。
87.角速度运算部951对马达角θm进行微分来计算马达角速度ωm,并输出到扭转角控制部300(步骤s120)。
88.之后,在目标转向转矩生成部202中,执行与图7所示的步骤s10~s40同样的动作,对反作用力用马达61进行驱动,并实施电流控制(步骤s130~s160)。
89.另一方面,在转轮角控制中,目标转轮角生成部910输入转向角θh,转向角θh被输入到限制部931。限制部931通过预先设定的上限值和下限值来限制转向角θh的上下限值(步骤s170),并作为转向角θh1输出到比率限制部932。比率限制部932通过预先设定的限制值对转向角θh1的变化量施加限制(步骤s180),并作为转向角θh2输出到校正部933。校正部933对转向角θh2进行校正来求出目标转轮角θtref(步骤s190),并输出到转轮角控制部920。
90.被输入了转轮角θt和目标转轮角θtref的转轮角控制部920通过减法部927从目标转轮角θtref减去转轮角θt,由此计算出偏差δθt0(步骤s200)。偏差δθt0被输入到转轮角反馈补偿部921,转轮角反馈补偿部921通过对偏差δθt0乘以补偿值来对偏差δθt0进行补偿(步骤s210),并将目标转轮角速度ωtref输出到速度控制部923。转轮角速度运算部922被输入转轮角θt,通过对转轮角θt进行微分运算来计算转轮角速度ωtt(步骤s220),并输出到速度控制部923。与速度控制部330同样地,速度控制部923通过i-p控制来计算马达电流指令值imcta(步骤s230),并输出到输出限制部926。输出限制部926通过预先设定的上限值和下限值来限制马达电流指令值imcta的上下限值(步骤s240),并作为马达电流指令值imct输出(步骤s250)。
91.马达电流指令值imct被输入到电流控制部930,电流控制部930基于马达电流指令值imct和由马达电流检测器940检测出的驱动用马达71的电流值imd对驱动用马达71进行驱动,来实施电流控制(步骤s260)。
92.此外,图7中的数据输入以及运算等的顺序能够适当变更。另外,也可以利用通常使用的控制构造来进行转轮角控制部920中的追随控制。转轮角控制部920只要是使实际角度(在此为转轮角θt)追随目标角度(在此为目标转轮角θtref)的控制结构即可,并不限定于在车辆用装置中使用的控制结构,例如也可以应用在工业用定位装置、工业用机器人等中使用的控制结构。
93.(实施方式)
94.在图1所示的结构中,如上所述,通过一个ecu 50来进行反作用力装置60和驱动装置70的控制。在以下所示的实施方式中,对分别设置有反作用力装置60用的ecu和驱动装置70用的ecu的结构进行说明。
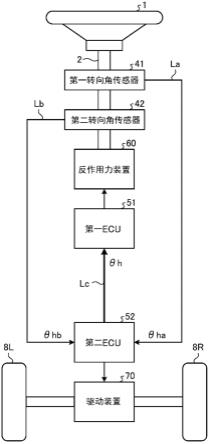
95.图8是示出实施方式所涉及的线控转向式的车辆用转向装置的系统概要结构的一例的图。在本实施方式所涉及的sbw系统中,如图8所示,反作用力装置60用的第一ecu 51和驱动装置70用的第二ecu 52经由通信线lc进行数据的发送和接收。
96.第一ecu 51与本公开中的第一控制部对应。另外,第二ecu 52与本公开中的第二控制部对应。此外,第一ecu 51及第二ecu 52的硬件结构与图2所示的结构相同,因此在此省略说明。
97.第一ecu 51具备与图3所示的目标转向转矩生成部200、扭转角控制部300以及转换部500相当的结构部,来作为内部模块结构。即,第一ecu 51具有基于方向盘1的转向角θh来控制反作用力装置60(反作用力用马达61)的转向反作用力控制功能。关于目标转向转矩生成部200、扭转角控制部300以及转换部500中的转向反作用力控制功能的各动作,在此省略说明。
98.第二ecu 52具备与图3所示的目标转轮角生成部910及转轮角控制部920相当的结构部,来作为内部模块结构。即,第二ecu 52具有基于方向盘1的转向角θh来控制驱动装置70(驱动用马达71)的转轮驱动控制功能。关于目标转轮角生成部910和转轮角控制部920的转轮驱动控制功能的各动作,在此省略说明。
99.在图8中,第一转向角传感器41和第二转向角传感器42与图1所示的转向角传感器14相当。第一转向角传感器41检测方向盘1的转向角θha。第二转向角传感器42检测方向盘1的转向角θhb。在第一转向角传感器41和第二转向角传感器42均正常的情况下,转向角θha和θhb实质上相同。即,在本实施方式所涉及的结构中,通过使转向角检测功能多重化,来使方向盘1的转向角的检测具有冗余性。
100.在本实施方式中,第一转向角传感器41和第二转向角传感器42的检测值即转向角θha和转向角θhb被输入到对驱动装置70进行控制的第二ecu 52。转向角θha经由信号线la被输入到第二ecu 52。转向角θhb经由信号线lb被输入到第二ecu 52。
101.第二ecu 52将第一转向角传感器41的检测值即转向角θha以及第二转向角传感器42的检测值即转向角θhb中的某一方作为方向盘1的转向角θh来使驱动装置70动作从而进行转轮驱动控制,并且经由通信线lc输出到第一ecu 51。
102.第一ecu 51基于从第二ecu 52经由通信线lc输入的方向盘1的转向角θh使反作用力装置60动作,来进行转向反作用力控制。
103.图9是示出比较例所涉及的线控转向式的车辆用转向装置的系统概要结构的一例的图。在图9所示的比较例所涉及的车辆用转向装置中,将第一转向角传感器41和第二转向角传感器42的检测值即转向角θha和转向角θhb输入到对反作用力装置60进行控制的第一ecu 51,并经由通信线lc从第一ecu 51向控制驱动装置70的第二ecu 52输出转向角θha和转向角θhb中的某一方。在该图9所示的比较例的结构中,在包括第一ecu 51与第二ecu 52之间的通信线lc的通信系统发生故障的情况下,无法通过驱动装置60继续进行使转轮驱动控制功能运行的运转。因此,需要通过使包括通信线lc的通信系统多重化等来确保针对通信系统的冗余性。另外,在图9所示的比较例的结构中,由于使包括通信线lc的通信多重化,因此需要针对第一ecu 51和第二ecu 52这两方确保冗余性。
104.与此相对地,在图8所示的本实施方式的结构中,第一转向角传感器41和第二转向角传感器42的检测值即转向角θha和转向角θhb被输入到对驱动装置70(驱动用马达71)进
行控制的第二ecu 52,由此,即使包括与控制反作用力装置60(反作用力用马达61)的第一ecu 51之间的通信线lc的通信系统或第一ecu 51发生故障,也能够通过驱动装置70继续进行运转,能够以简单的结构实现车辆系统的故障保护功能。即,在图8所示的本实施方式的结构中,如在图10中后述的那样,只要针对第二ecu 52具有冗余性即可,也可以是,不一定针对第一ecu 51具有冗余性。下面,参照图10、图11以及图12对本实施方式的处理的具体例进行说明。
105.图10是示出第一ecu和第二ecu的内部功能模块的一例的图。图11是示出第二ecu的处理流程的一例的流程图。图12是示出第一ecu的处理流程的一例的流程图。
106.首先,对第二ecu 52的处理进行说明。
107.第二ecu 52判定是否经由图8所示的信号线la从第一转向角传感器41接收到转向角θha(步骤s101)。在此,θha诊断功能例如判定是否能够通过θha接收功能部正常地接收到转向角θha。如果能够正常地接收转向角θha,则判定为接收到转向角θha(步骤s101;“是”),如果无法正常地接收转向角θha,则判定为无法接收转向角θha(步骤s101;“否”)。具体地说,在无法接收转向角θha的情况下,表示第一转向角传感器41、信号线la、θha接收功能部中的某一方发生故障。
108.在接收到转向角θha的情况下(步骤s101;“是”),第二ecu 52将从第一转向角传感器41接收到的转向角θha作为方向盘1的转向角θh(步骤s102)来对驱动装置70(驱动用马达71)进行控制(转轮驱动控制),并且经由包括图8所示的通信线lc的通信系统将该转向角θh发送到第一ecu 51(步骤s103),返回到步骤s101的处理。在此,在θha诊断功能中,通过切换功能将从第一转向角传感器41接收到的转向角θha应用为在转轮驱动控制和转向反作用力控制中使用的转向角θh。
109.在无法接收转向角θha的情况下(步骤s101;“否”),第二ecu 52判定是否经由图8所示的信号线lb从第二转向角传感器42接收到转向角θhb(步骤s104)。在此,θhb诊断功能例如判定是否能够通过θhb接收功能部正常地接收到转向角θhb。如果能够正常地接收到转向角θhb,则判定为接收到转向角θhb(步骤s104;“是”),如果无法正常地接收转向角θhb,则判定为无法接收转向角θhb(步骤s104;“否”)。具体地说,在无法接收转向角θhb的情况下,表示第二转向角传感器42、信号线lb、θhb接收功能部中的某一方发生故障。
110.在接收到转向角θhb的情况下(步骤s104;“是”),第二ecu 52将从第二转向角传感器42接收到的转向角θhb作为方向盘1的转向角θh(步骤s105)来对驱动装置70(驱动用马达71)进行控制(转轮驱动控制),并且经由包括图8所示的通信线lc的通信系统将该转向角θh发送到第一ecu 51(步骤s103),返回到步骤s101的处理。在此,在θhb诊断功能中,通过切换功能将从第二转向角传感器42接收到的转向角θhb应用为在转轮驱动控制和转向反作用力控制中使用的转向角θh。
111.在无法接收转向角θhb的情况下(步骤s104;“否”),第二ecu 52进行规定的异常时处理(步骤s106),结束本处理。作为第二ecu 52中的异常时处理,例如进行与应用了本实施方式所涉及的车辆用转向装置的车辆的自动驾驶水平相应的安全停止处理,并且向驾驶者通知包括第一转向角传感器41、第二转向角传感器42、信号线la、lb、θha接收功能部、θhb接收功能部的转向角检测功能发生故障。作为向驾驶员通知转向角检测功能发生故障的方式,例如既可以是在仪表盘等显示部中进行显示的方式、使led等发光元件发光的方式,也
可以是发出警报音的方式。不限定于第二ecu 52的异常时处理的方式。
112.接着,对第一ecu 51的处理进行说明。
113.第一ecu 51判定图8所示的包括通信线lc、第一ecu 51的θh接收功能部、第二ecu 52的θh发送功能部的通信系统是否正常(步骤s201)。在此,θh诊断功能例如对第2ecu 52进行转向角θh的发送请求,并判定是否能够通过θh接收功能部接收到针对该发送请求的ack信号。如果能够接收到ack信号,则判定为通信系统正常(步骤s201;“是”),如果无法接收ack信号,则判定为通信系统异常(步骤s201;“否”)。具体地说,通信系统异常表示包括通信线lc、第一ecu 51的θh接收功能部、第二ecu 52的θh发送功能部的通信系统发生故障。
114.在通信系统正常的情况下(步骤s201;“是”),第一ecu 51判定是否经由图8所示的通信线lc从第二ecu 52接收到转向角θh(步骤s202)。在此,θh诊断功能例如判定是否能够通过θh接收功能部正常地接收到转向角θh。如果能够正常地接收到转向角θh,则判定为接收到转向角θh(步骤s202;“是”),如果无法正常地接收转向角θh,则判定为无法接收转向角θh(步骤s202;“否”)。具体地说,在无法接收转向角θh的情况下,表示包括第一转向角传感器41、第二转向角传感器42、信号线la、lb、θha接收功能部、θhb接收功能部的转向角检测功能发生故障。
115.在转向角θh正常的情况下(步骤s202;“是”),第一ecu 51基于从第二ecu 52接收到的转向角θh对反作用力装置60(反作用力用马达61)进行控制(转向反作用力控制)(步骤s203),返回步骤s201的处理。
116.在通信系统异常的情况下(步骤s201;“否”)、或者无法接收转向角θh的情况下(步骤s202;“否”),即、在通信系统或转向角检测功能发生故障的情况下,第一ecu 51进行规定的异常时处理(步骤s204),结束本处理。作为第一ecu 51的异常时处理,例如使转向反作用力控制功能停止,并且向驾驶员通知停止了转向反作用力控制功能。作为向驾驶员通知停止了转向反作用力控制功能的方式,例如既可以是在仪表盘等显示部中进行显示的方式、使led等发光元件发光的方式,也可以是发出警报音的方式。不限定于第一ecu 51的异常时处理的方式。
117.在本实施方式所涉及的车辆用转向装置中,在第一ecu 51的处理(图11)和第二ecu 52的处理(图10)中,如果转向角检测功能健全、即至少能够正常地接收第一转向角传感器41的检测值即转向角θha和第二转向角传感器42的检测值即转向角θhb中的某一方,则即使假设包括通信线lc、θh接收功能部、第二ecu 52的θh发送功能部的通信系统发生故障,也能够通过由第二ecu52进行的驱动装置70(驱动用马达71)的转轮驱动控制来继续运转。即,无需具有针对通信系统的冗余性,如使包括第一ecu 51与第二ecu 52之间的通信线lc的通信系统多重化等,能够以简单的结构实现车辆系统的故障保护功能。
118.此外,在上述实施方式中,示出了作为转向角传感器设置有第一转向角传感器41和第二转向角传感器42这两个转向角传感器的结构例,但也可以设为设置三个以上的转向角传感器并使转向角检测功能进一步多重化来提高冗余性的结构。并且,多重化的要素不限于转向角检测功能,例如既可以是将图1所示的与转矩传感器10相当的转矩检测功能、针对各要素提供的电源系统进行了多重化的结构,也可以是将第一ecu 51、第二ecu 52的内部结构进行了多重化的结构。在该情况下,既可以将在构成第一ecu 51、第二ecu 52的半导体芯片上设置的硬件结构进行多重化,也可以是搭载有多个相同的半导体芯片的结构。
119.另外,第一ecu 51与第二ecu 52之间的通信系统既可以是图1所示的can 40,也可以是非can 40a。并不限定于第一ecu 51与第二ecu 52之间的通信系统的方式。
120.此外,在上文中使用的图是用于对本公开进行定性说明的概念图,并不限定于这些图。另外,上述实施方式是本公开的优选实施方式的一例,但并不限定于这些实施方式,在不脱离本公开的主旨的范围内能够进行各种变形来实施。
121.附图标记说明
122.1:方向盘;2:转向柱;3:减速机构;5:齿轮齿条机构;6a、6b:转向横拉杆;7a、7b:轮毂单元;8l、8r:转向车轮;10:转矩传感器;11:点火钥匙;12:车速传感器;13:电池;14:转向角传感器;41:第一转向角传感器;42:第二转向角传感器;50:控制单元(ecu);51:第一ecu(第一控制部);52:第二ecu(第二控制部);60:反作用力装置;61:反作用力用马达;70:驱动装置;71:驱动用马达;72:齿轮;73:角度传感器;130:电流控制部;140:马达电流检测器;200:目标转向转矩生成部;300:扭转角控制部;310:扭转角反馈(fb)补偿部;320:扭转角速度运算部;330:速度控制部;331:积分部;332:比例部;333、334:减法部;340:稳定化补偿部;350:输出限制部;361:减法部;362:加法部;500:转换部;910:目标转轮角生成部;920:转轮角控制部;921:转轮角反馈(fb)补偿部;922:转轮角速度运算部;923:速度控制部;926:输出限制部;927:减法部;930:电流控制部;931:限制部;933:校正部;932:比率限制部;940:马达电流检测器;1001:cpu;1005:接口;1006:a/d转换器;1007:pwm控制器;1100:控制用计算机(mcu)。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。