1.本发明涉及高程测量技术领域,具体为自由设站测量高程的方法。
背景技术:
2.原始的测量方法中,水准测量法精度高,但是需要耗费大量的人力、物力和时间,尤其是在坡度较大的巷道,利用水准测量法测量高程时的测站数太多,工作量太大;而三角高程测量法相对水准测量可以节省人力、物力和时间,但是三角高程法在测量时需要点下或点上对中,在井下巷道中多为点下对中,由于巷道中风速较强,点下对中时,耗时较长,且巷道中遮挡物较多,多存在不通视的问题,测量过程中工作量较大。
技术实现要素:
3.本发明为了解决水准测量法和三角高程测量法存在上述缺陷的问题,故提供了一种新的测量方法即自由设站测量高程的方法。
4.本发明是采用如下技术方案实现的:自由设站测量高程的方法,该方法采用全站仪进行测量,包括如下内容:1)a点为被测巷道顶板上已知高程的点,高程为h,a点处设有第一棱镜且镜高为x1, b点为被测巷道顶板上的被求取高程的点,高程为h1,b点处设有第二棱镜,第二棱镜的镜高为x2米;2)将全站仪架设于既能观测到a点,也能观测到b点的巷道底板的稳固位置,然后将全站仪进行整平,最后测量出全站仪距离a点的水平距离为l1,a点的竖盘读数为
∂1,全站仪距离b点的水平距离为l2,b点的竖盘读数
∂2;3)根据以下公式进行计算从而得出b点高程h1的值,盘左时的计算公式为h1=h
‑ꢀ
x
1-l1×
tan(90
°‑∂1) l2×
tan(90
°‑∂2) x2,盘右时的计算公式为h1=h
‑ꢀ
x
1-l1×
tan(
∂
1 ‑
270
°
) l2×
tan(
∂
2-270
°
) x2。
5.原理说明:本领域技术人员公知:盘左时,a点竖直角θ1=90
°‑∂1,b点竖直角θ2=90
°‑∂1,l1×
tan(90
°‑∂1)为位于a点的第一棱镜的棱镜中心距离全站仪中心水平面的高差,h
‑ꢀ
x
1-l1×
tan(90
°‑∂1)为全站仪中心水平面的高程,l2×
tan(90
°‑∂2) x2为b点距离全站仪中心水平面的高差,故b点高程=全站仪中心水平面的高程 b点距离全站仪中心水平面的高差,即盘左时的b点高程hi=h
‑ꢀ
x
1-l1×
tan(90
°‑∂1) l2×
tan(90
°‑∂2) x2;盘右时,a点竖直角θ1=
ꢀ∂
1 ‑
270
°
,b点竖直角θ2=
∂
1 ‑
270
°
,l1×
tan(
∂
1 ‑
270
°
)为位于a点的第一棱镜的棱镜中心距离全站仪中心水平面的高差,h
‑ꢀ
x
1-l1×
tan(
∂
1 ‑
270
°
)为全站仪中心水平面的高程,l2×
tan(
∂
1 ‑
270
°
) x2为b点距离全站仪中心水平面的高差,故b点高程=全站仪中心水平面的高程 b点距离全站仪中心水平面的高差,即盘右时的b点高程hi=h
‑ꢀ
x
1-l1×
tan(
∂
1 ‑
270
°
) l2×
tan(
∂
1 ‑
270
°
) x2,本领域人员公知,有检核时,b点的高程取值为盘左与盘右时得出的b点高程的平均值,无检核时,b点的高程取值可取盘左或盘右时得出的任意一个b点高程。
6.本发明所产生的有益效果如下:采用本发明的测量高程的方法,将水准测量和三角高程测量的方法结合,产生了意想不到的效果,抓住高程传递、高差增减的原理,使得测
量简单快捷、使用方便,极大的提高了工作效率且采用该测量方法一次所测距离较长,煤矿井下长度一般可达150米至200米,测量精度能满足井下使用,测量时只需要对全站仪进行整平不需要对中,测站灵活,很容易满足通视条件,测站不受风的影响,同时采用本测量方法即使在坡度较大的巷道进行测量也不会影响测量精度。
附图说明
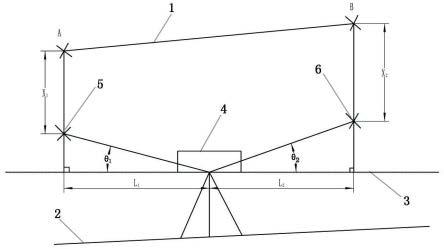
7.图1为本发明的测量原理图。
8.图中:1—巷道顶板,2—巷道底板,3—全站仪中心水平面,4—全站仪,5—第一棱镜,6—第二棱镜。
具体实施方式
9.自由设站测量高程的方法,该方法采用全站仪4进行测量,包括如下内容:1)a点为被测巷道顶板1上已知高程的点,高程为h,a点处设有第一棱镜5且镜高为x1, b点为被测巷道顶板1上的被求取高程的点,高程为h1,b点处设有第二棱镜6,第二棱镜6的镜高为x2米;2)将全站仪4架设于既能观测到a点,也能观测到b点的巷道底板2的稳固位置,然后将全站仪4进行整平,最后测量出全站仪4距离a点的水平距离为l1,a点的竖盘读数为
∂1,全站仪4距离b点的水平距离为l2,b点的竖盘读数
∂2;3)根据以下公式进行计算从而得出b点高程h1的值,盘左时的计算公式为h1=h
‑ꢀ
x
1-l1×
tan(90
°‑∂1) l2×
tan(90
°‑∂2) x2,盘右时的计算公式为h1=h
‑ꢀ
x
1-l1×
tan(
∂
1 ‑
270
°
) l2×
tan(
∂
2-270
°
) x2。
10.原理说明:本领域技术人员公知:盘左时,a点竖直角θ1=90
°‑∂1,b点竖直角θ2=90
°‑∂1,l1×
tan(90
°‑∂1)为位于a点的第一棱镜5的棱镜中心距离全站仪中心水平面3的高差,h
‑ꢀ
x
1-l1×
tan(90
°‑∂1)为全站仪中心水平面3的高程,l2×
tan(90
°‑∂2) x2为b点距离全站仪中心水平面3的高差,故b点高程=全站仪中心水平面3的高程 b点距离全站仪中心水平面3的高差,即盘左时的b点高程hi=h
‑ꢀ
x
1-l1×
tan(90
°‑∂1) l2×
tan(90
°‑∂2) x2;盘右时,a点竖直角θ1=
ꢀ∂
1 ‑
270
°
,b点竖直角θ2=
∂
1 ‑
270
°
,l1×
tan(
∂
1 ‑
270
°
)为位于a点的第一棱镜5的棱镜中心距离全站仪中心水平面3的高差,h
‑ꢀ
x
1-l1×
tan(
∂
1 ‑
270
°
)为全站仪中心水平面3的高程,l2×
tan(
∂
1 ‑
270
°
) x2为b点距离全站仪中心水平面3的高差,故b点高程=全站仪中心水平面3的高程 b点距离全站仪中心水平面3的高差,即盘右时的b点高程hi=h
‑ꢀ
x
1-l1×
tan(
∂
1 ‑
270
°
) l2×
tan(
∂
1 ‑
270
°
) x2,本领域人员公知,有检核时,b点的高程取值为盘左与盘右时得出的b点高程的平均值,无检核时,b点的高程取值可取盘左或盘右时得出的任意一个b点高程。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。