1.本技术涉及光学领域,尤其涉及一种触觉传感器及其参数测试方法、装置及存储介质。
背景技术:
2.随着智能机器人行业的不断发展,用于在智能机器人中模仿触觉功能的触觉传感器显得尤为重要。目前,触觉传感器可以包括基于不同原理(如光学原理)的不同类型的触觉传感器(如光学触觉传感器)。传统的光学触觉传感器可以为光纤光栅,光纤光栅主要由石英玻璃构成,不具备柔性;同时,由于光纤光栅中的内芯折射率和包层折射率的差接近千分之三,只能承受厘米级的弯曲损耗,无法承受毫米和微米级别的弯曲损耗。此外,通过传统的光纤光栅刻写方式对光纤光栅的内芯折射率进行调制的过程中,通常需要厘米级长度的光栅区域才能获得较好的信噪比,导致了光纤光栅的传感空间分辨率低。
技术实现要素:
3.本技术实施例提供一种触觉传感器及其参数测试方法、装置及存储介质,可使触觉传感器更具有柔性,并提高了触觉传感器的传感空间分辨率。
4.本技术实施例一方面提供一种触觉传感器,该触觉传感器由内芯、包层以及波导光栅构成,包层包裹波导光栅和内芯,波导光栅为周期性结构,内芯为蛇形结构;
5.其中,触觉传感器中包括多个触觉传感点,一个触觉传感点对应一个波导光栅,不同的触觉传感点对应的波导光栅的光栅周期不同。
6.可选的,触觉传感器还包括标记物,标记物用于标记内芯的光路。
7.其中,内芯由光敏性不可拉伸的透明高透光材料制成,包层由热固型可拉伸的透明高透光硅胶材料制成,内芯的光折射率大于包层的光折射率。
8.其中,波导光栅为矩形周期性结构、三角形周期性结构或者圆柱形周期性结构,且波导光栅与内芯等高、波导光栅与内芯不等高、波导光栅与内芯不具有接触面、或者波导光栅与内芯的上表面具有接触面。
9.其中,触觉传感器的表面具有至少一个圆台,一个圆台下完全覆盖至少三个触觉传感点,至少三个触觉传感点的结构为中心对称分布结构,且一个圆台的中心位置与至少三个触觉传感点的对称中心重合。
10.可选的,内芯的光折射率和包层的光折射率之间的差值可以大于或者等于预设光折射率差值(如0.04或者其它值)。
11.本技术实施例一方面提供一种触觉传感器的参数测试方法,包括:
12.采集各波导光栅对应的各触觉传感点的光栅光谱,并基于各触觉传感点的光栅光谱确定各触觉传感点对应的目标波长漂移量,一个触觉传感点对应一个目标波长漂移量;
13.获取波长漂移量和传感参数之间的多组第一对应关系,基于各目标波长漂移量和多组第一对应关系中确定出各目标波长漂移量对应的传感参数;
14.将各目标波长漂移量对应的传感参数确定为各触觉传感点的传感参数,该传感参数包括温度或者压力。
15.本技术实施例一方面提供一种触觉传感器的参数测试装置,包括:
16.漂移量确定模块,用于采集各波导光栅对应的各触觉传感点的光栅光谱,并基于各触觉传感点的光栅光谱确定各触觉传感点对应的目标波长漂移量,一个触觉传感点对应一个目标波长漂移量;
17.第一确定模块,用于获取波长漂移量和传感参数之间的多组第一对应关系,基于各目标波长漂移量从多组第一对应关系中确定出各目标波长漂移量对应的传感参数;
18.第二确定模块,用于将各目标波长漂移量对应的传感参数确定为各触觉传感点的传感参数,该传感参数包括压力或者温度。
19.其中,上述装置还包括:
20.折射率确定模块,用于基于内芯的形状、尺寸、光折射率以及包层的光折射率确定内芯的有效折射率;
21.光栅周期确定模块,用于基于预设反射波长、内芯的有效折射率以及任一波导光栅的阶数,确定任一波导光栅的光栅周期,以得到各波导光栅的光栅周期;
22.传感点确定模块,用于基于各波导光栅的光栅周期确定各波导光栅对应的各触觉传感点。
23.其中,触觉传感点的光栅光谱为透射光谱,透射光谱中包括第一透射波段和第二透射波段,第二透射波段为第一透射波段漂移后的透射波段;
24.漂移量确定模块包括:
25.第一波长确定单元,用于从任一触觉传感点的透射光谱中确定出第一透射波段上第一凹峰对应的第一透射波长、以及第二透射波段上的第二凹峰对应的第二透射波长,其中第二凹峰为第二透射波段上与第一凹峰对应的凹峰;
26.第一漂移量确定单元,用于基于第一凹峰对应的第一透射波长与第二凹峰对应的第二透射波长,确定任一触觉传感点对应的目标波长漂移量,以得到各触觉传感点对应的目标波长漂移量。
27.其中,触觉传感点的光栅光谱为反射光谱,反射光谱中包括第一反射波段和第二反射波段,第二反射波段为第一反射波段漂移后的反射波段;
28.漂移量确定模块包括:
29.第二波长确定单元,用于从任一触觉传感点的反射光谱中确定出第一反射波段上第一凸峰对应的第一反射波长以及第二反射波段上的第二凸峰对应的第二反射波长,其中第二凸峰为第二反射波段上与第一凸峰对应的凸峰;
30.第二漂移量确定单元,用于基于第一凸峰对应的第一反射波长与第二凸峰对应的第二反射波长,确定任一触觉传感点的目标波长漂移量以得到各触觉传感点对应的目标波长漂移量。
31.其中,各触觉传感点的传感参数包括各触觉传感点的压力;
32.上述装置还包括:
33.获取模块,用于获取多组第二对应关系,一组第二对应关系中包括一个圆台下覆盖的各触觉传感点的压力与圆台的切向力之间的对应关系;
34.切向力确定模块,用于基于至少一个圆台中的目标圆台所覆盖的各目标触觉传感点的压力,从多组第二对应关系中确定出各目标触觉传感点的压力对应的切向力,并将各目标触觉传感点的压力对应的切向力确定为目标圆台的切向力。
35.本技术一方面提供了一种计算机设备,包括:处理器、存储器、网络接口;
36.该处理器与存储器、网络接口相连,其中,网络接口用于提供数据通信功能,该存储器用于存储计算机程序,该处理器用于调用该计算机程序,以执行本技术实施例中上述一方面中的触觉传感器的参数测试方法。
37.根据本技术的一个方面,提供了一种计算机程序产品或计算机程序,该计算机程序产品或计算机程序包括计算机指令,该计算机指令存储在计算机可读存储介质中。计算机设备的处理器从计算机可读存储介质读取该计算机指令,处理器执行该计算机指令,使得该计算机设备执行上述一方面提供的触觉传感器的参数测试方法。
38.在本技术实施例中,触觉传感器中具有周期性结构的波导光栅和蛇形结构的内芯,可使该触觉传感器更具有柔性,并提高了触觉传感器的传感空间分辨率。计算机设备在确定触觉传感器中各波导光栅对应的各触觉传感点之后,可以基于各触觉传感点的光栅光谱确定各触觉传感点对应的目标波长漂移量,这里的目标波长漂移量后续可以用于确定各触觉传感点的传感参数。进一步地,计算机设备可以基于各目标波长漂移量从多组第一对应关系中确定出各目标波长漂移量对应的传感参数,并将各目标波长漂移量对应的传感参数确定为各触觉传感点的传感参数(如温度或者压力),从而可以基于各目标波长漂移量准确测试各触觉传感点的传感参数,提高了传感参数测试的准确度,适用性更强。
附图说明
39.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
40.图1是本技术实施例提供的一种网络架构的结构示意图;
41.图2是本技术实施例提供的一种触觉传感器参数测试的应用场景图;
42.图3是本技术实施例提供的一种触觉传感器的结构示意图;
43.图4是本技术实施例提供的一种触觉传感点的结构示意图;
44.图5是本技术实施例提供的一种波导光栅的结构示意图;
45.图6是本技术实施例提供的一种触觉传感器的结构示意图;
46.图7是本技术实施例提供的一种触觉传感器的结构示意图;
47.图8是本技术实施例提供的一种触觉传感器的参数测试方法的流程示意图;
48.图9是本技术实施例提供的一种触觉传感器的参数测试方法的流程示意图;
49.图10是本技术实施例提供的一种触觉传感器的参数测试装置的结构示意图;
50.图11是本技术实施例提供的一种计算机设备的结构示意图。
具体实施方式
51.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完
整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
52.人工智能(artificial intelligence,ai)是利用数字计算机或者数字计算机控制的机器模拟、延伸和扩展人的智能,感知环境、获取知识并使用知识获得最佳结果的理论、方法、技术及应用系统。换句话说,人工智能是计算机科学的一个综合技术,它企图了解智能的实质,并生产出一种新的能以人类智能相似的方式做出反应的智能机器。人工智能也就是研究各种智能机器的设计原理与实现方法,使机器具有感知、推理与决策的功能。随着人工智能技术研究和进步,人工智能技术在多个领域展开研究和应用,例如常见的智能家居、智能穿戴设备、虚拟助理、智能音箱、智能营销、无人驾驶、自动驾驶、无人机、智能机器人、智能医疗、智能客服等,相信随着技术的发展,人工智能技术将在更多的领域得到应用,并发挥越来越重要的价值。
53.请参见图1,图1是本技术实施例提供的一种网络架构的结构示意图。如图1所示,该网络架构可以包括服务器10和用户终端集群,该用户终端集群可以包括多个用户终端,如图1所示,具体可以包括用户终端100a、用户终端100b、用户终端100c、
…
、用户终端100n。其中,服务器10可以是独立的物理服务器,也可以是多个物理服务器构成的服务器集群或者分布式系统,还可以是提供云服务、云数据库、云计算、云函数、云存储、网络服务、云通信、中间件服务、域名服务、安全服务、内容分发网络(content delivery network,cdn)、以及大数据和人工智能平台等基础云计算服务的云服务器。用户终端集群中的任一用户终端可以包括但不限于摄像头、考勤机、监控仪、平板设备、台式电脑、笔记本电脑、手机或者其他任何能够完成信息交互的终端设备。
54.可以理解,本技术实施例中的计算机设备可以为集成有触觉传感器的实体终端,该实体终端可以为如图1所示的服务器10,也可以为用户终端100a、用户终端100b、用户终端100c、
…
、用户终端100n中的任一个,具体可根据实际应用场景确定,在此不做限定。为方便描述,下面将以服务器10为例进行示例说明。如图1所示,用户终端100a、用户终端100b、用户终端100c、
…
、用户终端100n可以分别与上述服务器10进行网络连接,以便于每个用户终端可以通过该网络连接与服务器10进行数据交互。服务器10在确定触觉传感器中各触觉传感点的传感参数之后,可以基于各触觉传感点的传感参数向用户(如用户终端100a对应的用户)发送针对上述传感参数的提示信息。这里的触觉传感器可以为用于在智能机器人系统中模仿触觉功能的传感器。本技术实施例可以将触觉传感器所测试的参数统称为传感参数,如温度、压力或者其它参数,具体可根据实际应用场景确定,在此不作限制。
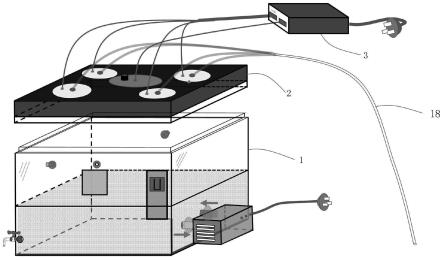
55.在智能机器人应用场景下,本技术实施例中提供的计算机设备可以是智能机器人的控制中心(可以理解为智能机器人的控制器、控制系统或者数据处理中心等)。为便于理解,请参见图2,图2是本技术提供的一种触觉传感器参数测试的应用场景图。如图2所示,触觉传感器(如触觉传感器2)可以设置于智能机器人(如智能机器人1)的抓取部位(如机械手指),即将触觉传感器2作为智能机器人1的机械手指的感知单元。其中,触觉传感器2可以包括多个触觉传感点,如36个或者其它数量的触觉传感点。在智能机器人1抓取物品(如物品3)时,计算机设备可确定触觉传感器2中各波导光栅对应的各触觉传感点,并采集各触觉传感点的光栅光谱,基于各触觉传感点的光栅光谱确定各触觉传感点对应的目标波长漂移
量。本技术实施例可以将触觉传感点对应的波导光栅的透射光谱和/或反射光谱统称为光栅光谱。波导光栅可以通过周期性的折射率变化反射特定波长的光,且波导光栅是一种周期性折射率调制的反射结构。本技术实施例可以将光栅光谱中原波段上第i个凹峰或者凸峰对应的波长,以及原波段漂移之后的波段上第i个凹峰或者凸峰对应的波长之间的差值称之为目标波长漂移量,其中,i为正整数。这里的原波段漂移之后的波段可以为各触觉传感点的传感参数(如智能机器人1抓取物品3后产生的压力或者智能机器人1抓取物品3时的温度)改变之后,各触觉传感点对应的原波段发生漂移之后所形成的波段。
56.在确定各触觉传感点对应的目标波长漂移量之后,计算机设备可以获取波长漂移量和传感参数之间的多组第一对应关系,基于各目标波长漂移量从多组第一对应关系中确定出各目标波长漂移量对应的传感参数,并将各目标波长漂移量对应的传感参数确定为触觉传感器2中各触觉传感点的传感参数。假设传感参数包括温度,在智能机器人1的机械手指靠近物品3时,计算机设备可基于触觉传感器2预测物品3的温度,或者在智能机器人1抓取到物品3时,计算机设备可基于触觉传感器2确定物品3的温度,并向控制智能机器人1的用户发送提示信息以提示该用户物品3的温度。假设传感参数包括压力,计算机设备可基于触觉传感器2确定各触觉传感点的压力是否发生改变,从而在各触觉传感点的压力改变时确定物品3会发生滑动或者智能机器人1抓取不牢固,并向上述用户发送提示信息。这时,用户可以基于该提示信息对智能机器人1下发指令,控制智能机器人1重新抓取物品3或者调整物品3的位置,以使物品3不再发生滑动或者智能机器人1牢固地抓取物品3。
57.由此可见,在本技术实施例中,计算机设备可以基于目标波长漂移量与传感参数之间的第一对应关系,确定各触觉传感器的传感参数,提高了测试传感参数的准确度;另外,由于该触觉传感器的传感空间分辨率高、传感灵敏度更大且具有柔性,因此传感参数测试的准确度更高,适用性更强。
58.进一步地,为便于理解,请参见图3,图3是本技术实施例提供的一种触觉传感器的结构示意图。如图3所示,触觉传感器(如触觉传感器3)可以由内芯、包层以及波导光栅构成。其中,内芯可以由光敏性不可拉伸的透明高透光材料(如su8光刻胶或者其它材料)制成,包层可以由热固型可拉伸的透明高透光硅胶材料(如oe-6560光刻胶或者其它材料)制成,且内芯的光折射率大于包层的光折射率,内芯可以为蛇形结构,波导光栅可以为周期性结构。由于内芯和包层都是由透明高透光材料制成,为了避免在光学仪器中无法对触觉传感器3的内芯光路进行观察,因此可以在内芯上旋涂一层标记物(如黑色标记物)以标记内芯的光路。可选的,内芯的光折射率和包层的光折射率之间的差值可以大于或者等于预设光折射率差值(如0.04或者其它值),以实现触觉传感器的更小弯曲半径(如500μm或者其它值)的弯曲,从而提高了触觉传感器的传感空间分辨率,如传感空间分辨率可以小于或者等于1mm。这里的预设光折射率差值可以为用户设置的默认值或者触觉传感器所配置的光折射率差值。
59.如图3所示,由触觉传感器3中传感部分(即触觉传感点)结构的局部放大图可以得到,触觉传感器3中可以包括多个触觉传感点(如36个或者其它数值的触觉传感点),一个触觉传感点对应一个波导光栅,且不同的触觉传感点对应的波导光栅的光栅周期不同,从而可以根据波导光栅的光栅周期分辨不同的触觉传感点。请一并参见图4,图4是本技术实施例提供的一种触觉传感点的结构示意图。如图4所示,上述触觉传感器3中触觉传感点的结
构可以如图4中的4a所示,内芯(如2μm线宽或者其它内芯线宽的内芯)的周围具有随光栅周期呈周期性变化的波导光栅,如与内芯等高的矩形周期性结构的波导光栅。换言之,波导光栅在内芯外围呈周期性分布。如图4中的4a所示的触觉传感点结构的内芯截面俯视图可以如图4中的4b所示,包层可包裹波导光栅和内芯,内芯外围为具有周期性结构的波导光栅,且内芯外围还具有标记物(如黑色标记物),该标记物可用于标记内芯光路以在光学仪器中清晰地观察内芯光路。
60.在一些可行的实施方式中,波导光栅可以为矩形周期性结构、三角形周期性结构、圆柱形周期性结构或者其它形状的周期性结构,且波导光栅可以与内芯等高、波导光栅可以与内芯不等高、波导光栅可以与内芯不具有接触面、波导光栅可以与内芯的上表面具有接触面、或者与内芯具有其它位置关系或者其它接触关系。这里的波导光栅可以是由上述波导光栅结构中的一种结构或者两种结构组合得到的波导光栅,具体可根据实际应用场景确定,在此不作限制。为方便描述,下面结合图5将对波导光栅的具体结构进行示例说明。参见图5,图5是本技术实施例提供的一种波导光栅的结构示意图。由于光不仅可以在内芯波导的内部传输,也可以在内芯波导的附近传输,因此可以在内芯波导的外部做具有周期性结构的波导光栅,使内芯波导产生布拉格反射以供触觉传感器正常工作。如图5中的5a所示,波导光栅10可以为与内芯不等高的矩形周期性结构,如图5中的5b所示,波导光栅11可以为与内芯不等高的三角形周期性结构,如图5中的5c所示,波导光栅12可以为与内芯不等高且与内芯不具有接触面的圆柱形周期性结构,如图5中的5d所示,波导光栅13可以为与内芯上表面具有接触面的矩形周期性结构。
61.在一些可行的实施方式中,触觉传感器的表面可设置有至少一个圆台(如9个圆台或者其它数值的圆台),至少一个圆台中的一个圆台下可完全覆盖至少三个触觉传感点,上述至少三个触觉传感点的结构为中心对称分布结构,且一个圆台的中心位置与至少三个触觉传感点的对称中心重合。参见图6,图6是本技术实施例提供的一种触觉传感器的结构示意图。如图6所示,如上述图3所示的触觉传感器3的表面上可设置有至少一个圆台(如9个圆台),一个圆台(如圆台10)下可完全覆盖至少三个触觉传感点(如4个触觉传感点),圆台10的中心位置可与其4个触觉传感点的对称中心重合,或者圆台10边缘可与其所覆盖的圆环标记物边缘对齐。请一并参见图7,图7是本技术实施例提供的一种触觉传感器的结构示意图。如图7所示,触觉传感器7中可包含27个触觉传感点,该触觉传感器7的表面上可设置9个圆台,一个圆台(如圆台20)下可覆盖3个触觉传感点,且圆台10的中心位置可与其所覆盖的3个触觉传感点的对称中心重合。
62.在本技术实施例中,由于制得触觉传感器的材料的杨氏模量低,更容易受压变形产生变化的光信号,从而提高了传感灵敏度;由于内芯的蛇形结构可抵抗弯曲和拉伸,因此可以不影响传感器性能,同时使该触觉传感器更具有柔性;同时,由于触觉传感器中具有周期性结构的波导光栅,因此提高了触觉传感器的传感空间分辨率。
63.请参见图8,图8是本技术实施例提供的一种触觉传感器的参数测试方法的流程示意图。如图8所示,该方法可以由计算机设备执行,该计算机设备可以为集成有触觉传感器的实体终端,因此该方法也可以通过计算机设备中的触觉传感器执行。为方便描述,下面将以计算机设备为例进行说明,该方法可包括以下步骤s101-步骤s103:
64.步骤s101,采集各波导光栅对应的各触觉传感点的光栅光谱,并基于各触觉传感
点的光栅光谱确定各触觉传感点对应的目标波长漂移量。
65.在一些可行的实施方式中,计算机设备可以基于内芯的形状、尺寸、光折射率以及包层的光折射率确定内芯的有效折射率。进一步地,计算机设备可以基于预设反射波长、内芯的有效折射率以及任一波导光栅的阶数,确定任一波导光栅的光栅周期,以得到各波导光栅的光栅周期。其中,预设反射波长可以为用户设置的波长或者默认波长值。应当理解,计算机设备确定任一波导光栅的光栅周期λ的公式可以如下述公式(1)所示:
[0066][0067]
其中,λ可以表示预设反射波长,n
eff
可以表示内芯的有效折射率,n可以表示任一波导光栅的阶数,n为正整数,如1阶波导光栅的阶数为1,即n=1,n阶波导光栅的阶数为n。
[0068]
进一步地,计算机设备可基于上述公式(1)确定各波导光栅的光栅周期,由于各波导光栅的光栅周期不同,因此可以基于各波导光栅的光栅周期确定各波导光栅对应的各触觉传感点。在各触觉传感点的温度改变时,触觉传感器材料会发生轻微膨胀,从而使波导光栅的光栅周期变大,同时由于温度改变引起的弹光效应会导致触觉传感器材料的折射率也会发生改变,从而使内芯的有效折射率发生变化。可以得到,由于温度的变化会导致各触觉传感点的透射光谱上凹峰的中心波长发生漂移或者各触觉传感点的反射波段上凸峰的中心波长发生漂移,因此可通过中心波长漂移量(可以简称为波长漂移量)的大小来判断温度改变的大小。在各触觉传感点的压力改变时,各触觉传感点的透射光谱上凹峰的中心波长发生漂移或者各触觉传感点的反射波段上凸峰的中心波长发生漂移,因此可通过波长漂移量的大小来判断压力改变的大小。这时,计算机设备可以基于光谱仪采集各触觉传感点的光栅光谱(如透射光谱或者反射光谱),并基于各触觉传感点的透射光谱或者反射光谱确定各触觉传感点对应的目标波长漂移量。其中,一个触觉传感点对应一个目标波长漂移量,不同触觉传感点对应的目标波长漂移量可以相同,也可以不同,具体可根据实际应用场景确定,在此不作限制。
[0069]
在一些可行的实施方式中,触觉传感点的光栅光谱可以为透射光谱,透射光谱中包括第一透射波段和第二透射波段,第二透射波段可以为第一透射波段漂移后的透射波段。本技术实施例可以将触觉传感点的传感参数改变之前的透射波段统称为第一透射波段,本技术实施例可以将触觉传感点的传感参数改变之后的透射波段统称为第二透射波段。计算机设备可以从任一触觉传感点的透射光谱中确定出第一透射波段上第一凹峰对应的第一透射波长、以及第二透射波段上的第二凹峰对应的第二透射波长。其中第二凹峰为第二透射波段上与第一凹峰对应的凹峰,比如,第一透射波段上第i个凹峰对应第二透射波段上的第i个凹峰。进一步地,计算机设备可以基于第一凹峰对应的第一透射波长与第二凹峰对应的第二透射波长,确定任一触觉传感点对应的目标波长漂移量,以得到各触觉传感点对应的目标波长漂移量。具体地,计算机设备可以将第一透射波长与第二透射波长之间的差值确定为任一触觉传感点对应的目标波长漂移量,以得到各触觉传感点对应的目标波长漂移量。
[0070]
在一些可行的实施方式中,触觉传感点的光栅光谱可以为反射光谱,反射光谱中包括第一反射波段和第二反射波段,第二反射波段为第一反射波段漂移后的反射波段。本技术实施例可以将触觉传感点的传感参数改变之前的反射波段统称为第一反射波段,本申
请实施例可以将触觉传感点的传感参数改变之后的反射波段统称为第二反射波段。计算机设备可以从任一触觉传感点的反射光谱中确定出第一反射波段上第一凸峰对应的第一反射波长以及第二反射波段上的第二凸峰对应的第二反射波长。其中,第二凸峰为第二反射波段上与第一凸峰对应的凸峰,比如,第一反射波段上第i个凸峰对应第二反射波段上的第i个凸峰。进一步地,计算机设备可以基于第一凸峰对应的第一反射波长与第二凸峰对应的第二反射波长,确定任一触觉传感点的目标波长漂移量,以得到各触觉传感点对应的目标波长漂移量。具体地,计算机设备可以将第一反射波长与第二反射波长之间的差值确定为任一触觉传感点对应的目标波长漂移量,以得到各触觉传感点对应的目标波长漂移量。
[0071]
步骤s102,获取波长漂移量和传感参数之间的多组第一对应关系,基于各目标波长漂移量从多组第一对应关系中确定出各目标波长漂移量对应的传感参数。
[0072]
在一些可行的实施方式中,计算机设备可以从传感器数据库中获取波长漂移量和传感参数之间的多组第一对应关系,这里的多组第一对应关系的数据格式可以为表格、键值对或者其它数据格式。其中,传感参数可包括温度、压力或者其它参数。这里的传感器数据库中可以包含用户预先存储的波长漂移量和传感参数之间的多组第一对应关系,或者触觉传感器默认配置的波长漂移量和传感参数之间的多组第一对应关系。例如,传感器数据库中的波长漂移量和传感参数之间的多组第一对应关系可以如下述表1所示。其中,表1为波长漂移量和传感参数的对应关系表。
[0073]
表1
[0074]
波长漂移量传感参数波长漂移量1传感参数1
……
波长漂移量m传感参数m
[0075]
进一步地,计算机设备在获取到波长漂移量和传感参数之间的多组第一对应关系之后,可以基于各目标波长漂移量从多组第一对应关系中确定出各目标波长漂移量对应的传感参数。假设传感参数包括压力,目标波长漂移量越大,目标波长漂移量对应的压力就越大。假设波长漂移量和传感参数之间的多组第一对应关系如上述表1所示,若任一触觉传感点对应的任一目标波长漂移量为波长漂移量1,计算机设备可以基于表1中的m组第一对应关系,确定任一目标波长漂移量对应的传感参数为波长漂移量1对应的传感参数1,进而可以确定各目标波长漂移量对应的传感参数。
[0076]
步骤s103,将各目标波长漂移量对应的传感参数确定为各触觉传感点的传感参数。
[0077]
在一些可行的实施方式中,传感参数可包括温度、压力或者其它参数。触觉传感器可以设置于智能机器人的抓取部位(如机械手指),在智能机器人抓取物品时,假设传感参数为温度,计算机设备可直接确定该物品的温度。假设传感参数为压力,计算机设备可以在各触觉传感点的压力发生改变时,确定物品发生滑动或者智能机器人抓取不牢固,并向用户发送提示信息。这时,用户可以基于该提示信息对智能机器人下发指令,控制智能机器人重新抓取物品或者调整物品的位置,以使物品不再发生滑动或者智能机器人牢固地抓取物品。
[0078]
在本技术实施例中,计算机设备在确定各波导光栅对应的各触觉传感点之后,可
以基于各触觉传感点的光栅光谱确定各触觉传感点对应的目标波长漂移量,这里的目标波长漂移量后续可以用于确定各触觉传感点的传感参数。进一步地,计算机设备可以基于各目标波长漂移量从多组第一对应关系中确定出各目标波长漂移量对应的传感参数,并将各目标波长漂移量对应的传感参数确定为各触觉传感点的传感参数(如温度或者压力),从而可以基于各目标波长漂移量准确测试各触觉传感点的传感参数,同时,由于该触觉传感器的传感空间分辨率高、传感灵敏度更大且具有柔性,传感参数测试的准确度更高,适用性更强。
[0079]
进一步地,请参见图9,图9是本技术实施例提供的一种触觉传感器的参数测试方法的流程示意图。如图9所示,该方法可以由计算机设备执行,该计算机设备可以为集成有触觉传感器的实体终端,因此该方法也可以通过计算机设备中的触觉传感器执行。为方便描述,下面将以计算机设备为例进行说明,该方法可包括以下步骤s201-步骤s205:
[0080]
步骤s201,采集各波导光栅对应的各触觉传感点的光栅光谱,并基于各触觉传感点的光栅光谱确定各触觉传感点对应的目标波长漂移量。
[0081]
步骤s202,获取波长漂移量和传感参数之间的多组第一对应关系,基于各目标波长漂移量和多组第一对应关系中确定出各目标波长漂移量对应的传感参数。
[0082]
步骤s203,将各目标波长漂移量对应的传感参数确定为各触觉传感点的传感参数。
[0083]
其中,该步骤s201-步骤s203的具体实现方式可以参见上述图8所对应实施例中对步骤s101-步骤s103的描述,这里将不再继续进行赘述。
[0084]
步骤s204,获取多组第二对应关系。
[0085]
在一些可行的实施方式中,计算机设备可以从传感器数据库中获取多组第二对应关系,一组第二对应关系中包括一个圆台下覆盖的各触觉传感点的压力与圆台的切向力之间的对应关系。这里的多组第二对应关系的数据格式可以为表格、键值对或者其它数据格式。这里的传感器数据库中可以包含用户预先存储的多组第二对应关系,或者触觉传感器默认配置的多组第二对应关系。
[0086]
步骤s205,基于至少一个圆台中的目标圆台所覆盖的各目标触觉传感点的压力,从多组第二对应关系中确定出各目标触觉传感点的压力对应的切向力,并将各目标触觉传感点的压力对应的切向力确定为目标圆台的切向力。
[0087]
在一些可行的实施方式中,在获取多组第二对应关系之后,计算机设备可以基于目标圆台所覆盖的各目标触觉传感点的压力,从多组第二对应关系中确定出目标圆台的切向力。本技术实施例可以将至少一个圆台中的任意一个圆台称之为目标圆台。不同圆台的切向力可以相同,也可以不同。由于触觉传感器上的一个圆台可以覆盖至少三个不同周期的波导光栅,当圆台收到正压力时,所覆盖的至少三个波导光栅受力一致,当圆台同时受到正压力和切向力时,所覆盖的至少三个波导光栅受力不一致,可通过所覆盖的至少三个波导光栅受力不一致时产生的传感信号(如上述各触觉传感点的波长漂移量)来判断该圆台所受切向力的大小和方向。例如,该目标圆台所覆盖的各目标触觉传感点中的目标触觉传感点1的压力最大,则表明了该目标圆台受到的切向力的方向倾斜至目标触觉传感点1所在的方位。
[0088]
在本技术实施例中,计算机设备在确定各波导光栅对应的各触觉传感点之后,可
以基于各触觉传感点的光栅光谱确定各触觉传感点对应的目标波长漂移量,这里的目标波长漂移量后续可以用于确定各触觉传感点的传感参数。进一步地,计算机设备可以基于各目标波长漂移量从多组第一对应关系中确定出各目标波长漂移量对应的传感参数,并将各目标波长漂移量对应的传感参数确定为各触觉传感点的传感参数(如温度或者压力),从而可以基于各目标波长漂移量准确测试各触觉传感点的温度或者压力。另外,计算机设备也可以基于各触觉传感点的压力确定至少一个圆台中的目标圆台受到的切向力,可在测试各触觉传感点的温度或者压力的同时测试圆台的切向力,并且由于该触觉传感器的传感空间分辨率高、传感灵敏度更大且具有柔性,传感参数测试的准确度更高,适用性更强。
[0089]
进一步地,请参见图10,图10是本技术实施例提供的一种触觉传感器的参数测试装置的结构示意图。该触觉传感器的参数测试装置可以是运行于计算机设备中的一个计算机程序(包括程序代码),例如,该触觉传感器的参数测试装置为一个应用软件;该触觉传感器的参数测试装置可以用于执行本技术实施例提供的方法中的相应步骤。如图10所示,该触觉传感器的参数测试装置1可以运行于计算机设备或者触觉传感器,该计算机设备可以为上述图1所对应实施例中的服务器10,该触觉传感器可以为上述图3中的触觉传感器3。该触觉传感器的参数测试装置1可以包括:折射率确定模块10、光栅周期确定模块20、传感点确定模块30、漂移量确定模块40、第一确定模块50、第二确定模块60、获取模块70以及切向力确定模块80。
[0090]
漂移量确定模块40,用于采集各触觉传感点的光栅光谱,并基于各触觉传感点的光栅光谱确定各触觉传感点对应的目标波长漂移量,一个触觉传感点对应一个目标波长漂移量。
[0091]
其中,触觉传感点的光栅光谱为透射光谱,透射光谱中包括第一透射波段和第二透射波段,第二透射波段为第一透射波段漂移后的透射波段;
[0092]
漂移量确定模块40可以包括:第一波长确定单元401和第一漂移量确定单元402。
[0093]
第一波长确定单元401,用于从任一触觉传感点的透射光谱中确定出第一透射波段上第一凹峰对应的第一透射波长、以及第二透射波段上的第二凹峰对应的第二透射波长,其中第二凹峰为第二透射波段上与第一凹峰对应的凹峰;
[0094]
第一漂移量确定单元402,用于基于第一凹峰对应的第一透射波长与第二凹峰对应的第二透射波长,确定任一触觉传感点对应的目标波长漂移量,以得到各触觉传感点对应的目标波长漂移量。
[0095]
其中,该第一波长确定单元401和第一漂移量确定单元402的具体实现方式可以参见上述图8所对应实施例中对步骤s101的描述,这里将不再继续进行赘述。
[0096]
其中,触觉传感点的光栅光谱为反射光谱,反射光谱中包括第一反射波段和第二反射波段,第二反射波段为第一反射波段漂移后的反射波段;
[0097]
漂移量确定模块40包括:第二波长确定单元403和第二漂移量确定单元404。
[0098]
第二波长确定单元403,用于从任一触觉传感点的反射光谱中确定出第一反射波段上第一凸峰对应的第一反射波长以及第二反射波段上的第二凸峰对应的第二反射波长,其中第二凸峰为第二反射波段上与第一凸峰对应的凸峰;
[0099]
第二漂移量确定单元404,用于基于第一凸峰对应的第一反射波长与第二凸峰对应的第二反射波长,确定任一触觉传感点的目标波长漂移量以得到各触觉传感点对应的目
标波长漂移量。
[0100]
其中,该第二波长确定单元403和第二漂移量确定单元404的具体实现方式可以参见上述图8所对应实施例中对步骤s101的描述,这里将不再继续进行赘述。
[0101]
第一确定模块50,用于获取波长漂移量和传感参数之间的多组第一对应关系,基于各目标波长漂移量从多组第一对应关系中确定出各目标波长漂移量对应的传感参数。
[0102]
第二确定模块60,用于将各目标波长漂移量对应的传感参数确定为各触觉传感点的传感参数,传感参数包括温度或者压力。
[0103]
其中,上述触觉传感器的参数测试装置1还包括:
[0104]
折射率确定模块10,用于基于内芯的形状、尺寸、光折射率以及包层的光折射率确定内芯的有效折射率;
[0105]
光栅周期确定模块20,用于基于预设反射波长、内芯的有效折射率以及任一波导光栅的阶数,确定任一波导光栅的光栅周期,以得到各波导光栅的光栅周期;
[0106]
传感点确定模块30,用于基于各波导光栅的光栅周期确定各波导光栅对应的各触觉传感点。
[0107]
其中,各触觉传感点的传感参数包括各触觉传感点的压力;
[0108]
上述触觉传感器的参数测试装置1还包括:
[0109]
获取模块70,用于获取多组第二对应关系,一组第二对应关系中包括一个圆台下覆盖的各触觉传感点的压力与圆台的切向力之间的对应关系;
[0110]
切向力确定模块80,用于基于至少一个圆台中的目标圆台所覆盖的各目标触觉传感点的压力,从多组第二对应关系中确定出各目标触觉传感点的压力对应的切向力,并将各目标触觉传感点的压力对应的切向力确定为目标圆台的切向力。
[0111]
其中,该折射率确定模块10、光栅周期确定模块20、传感点确定模块30、漂移量确定模块40、第一确定模块50、第二确定模块60、获取模块70以及切向力确定模块80的具体实现方式可以参见上述图8所对应实施例中对步骤s101-步骤s103的描述和/或上述图9所对应实施例中对步骤s201-步骤s205的描述,这里将不再继续进行赘述。另外,对采用相同方法的有益效果描述,也不再进行赘述。
[0112]
进一步地,请参见图11,图11是本技术实施例提供的一种计算机设备的结构示意图。如图11所示,该计算机设备1000可以为上述图1对应实施例中的服务器10,该计算机设备1000可以包括:至少一个处理器1001,例如cpu,至少一个网络接口1004,用户接口1003,存储器1005,至少一个通信总线1002。其中,通信总线1002用于实现这些组件之间的连接通信。其中,用户接口1003可以包括显示屏(display)、键盘(keyboard),网络接口1004可选地可以包括标准的有线接口、无线接口(如wi-fi接口)。存储器1005可以是高速ram存储器,也可以是非不稳定的存储器(non-volatile memory),例如至少一个磁盘存储器。存储器1005可选地还可以是至少一个位于远离前述处理器1001的存储装置。如图11所示,作为一种计算机存储介质的存储器1005中可以包括操作系统、网络通信模块、用户接口模块以及设备控制应用程序。
[0113]
在图11所示的计算机设备1000中,网络接口1004主要用于与用户终端进行网络通信;而用户接口1003主要用于为用户提供输入的接口;而处理器1001可以用于调用存储器1005中存储的设备控制应用程序,以实现:
[0114]
采集各波导光栅对应的各触觉传感点的光栅光谱,并基于各触觉传感点的光栅光谱确定各触觉传感点对应的目标波长漂移量,一个触觉传感点对应一个目标波长漂移量;
[0115]
获取波长漂移量和传感参数之间的多组第一对应关系,基于各目标波长漂移量和多组第一对应关系中确定出各目标波长漂移量对应的传感参数;
[0116]
将各目标波长漂移量对应的传感参数确定为各触觉传感点的传感参数,该传感参数包括温度或者压力。
[0117]
应当理解,本技术实施例中所描述的计算机设备1000可执行前文图8和/或图9所对应实施例中对该触觉传感器的参数测试方法的描述,也可执行前文图10所对应实施例中对该触觉传感器的参数测试装置1的描述,在此不再赘述。另外,对采用相同方法的有益效果描述,也不再进行赘述。
[0118]
此外,这里需要指出的是:本技术实施例还提供了一种计算机可读存储介质,且该计算机可读存储介质中存储有前文提及的触觉传感器的参数测试装置1所执行的计算机程序,且该计算机程序包括程序指令,当该处理器执行该程序指令时,能够执行前文图8和图9所对应实施例中对该触觉传感器的参数测试方法的描述,因此,这里将不再进行赘述。另外,对采用相同方法的有益效果描述,也不再进行赘述。对于本技术所涉及的计算机可读存储介质实施例中未披露的技术细节,请参照本技术方法实施例的描述。作为示例,程序指令可被部署为在一个计算设备上执行,或者在位于一个地点的多个计算设备上执行,又或者,在分布在多个地点且通过通信网络互连的多个计算设备上执行,分布在多个地点且通过通信网络互连的多个计算设备可以组成区块链系统。
[0119]
本技术的一个方面,提供了一种计算机程序产品或计算机程序,该计算机程序产品或计算机程序包括计算机指令,该计算机指令存储在计算机可读存储介质中。计算机设备的处理器从计算机可读存储介质读取该计算机指令,处理器执行该计算机指令,使得该计算机设备执行本技术实施例中提供的触觉传感器的参数测试方法。
[0120]
本领域普通技术人员可以理解实现上述实施例方法中的全部或部分流程,是可以通过计算机程序来指令相关的硬件来完成,上述的程序可存储于一计算机可读取存储介质中,该程序在执行时,可包括如上述各方法的实施例的流程。上述计算机可读存储介质可以是前述任一实施例提供的触觉传感器的参数测试装置或者上述设备的内部存储单元,例如电子设备的硬盘或内存。该计算机可读存储介质也可以是该电子设备的外部存储设备,例如该电子设备上配备的插接式硬盘,智能存储卡(smart media card,smc),安全数字(secure digital,sd)卡,闪存卡(flash card)等。上述计算机可读存储介质还可以包括磁碟、光盘、只读存储记忆体(read-only memory,rom)或随机存储记忆体(random access memory,ram)等。进一步地,该计算机可读存储介质还可以既包括该电子设备的内部存储单元也包括外部存储设备。该计算机可读存储介质用于存储该计算机程序以及该电子设备所需的其他程序和数据。该计算机可读存储介质还可以用于暂时地存储已经输出或者将要输出的数据。
[0121]
本发明的权利要求书和说明书及附图中的术语“第一”、“第二”等是用于区别不同对象,而不是用于描述特定顺序。此外,术语“包括”和“具有”以及它们任何变形,意图在于覆盖不排他的包含。在本文中提及“实施例”意味着,结合实施例描述的特定特征、结构或特性可以包含在本发明的至少一个实施例中。在说明书中的各个位置展示该短语并不一定均
是指相同的实施例,也不是与其它实施例互斥的独立的或备选的实施例。本领域技术人员显式地和隐式地理解的是,本文所描述的实施例可以与其它实施例相结合。在本发明说明书和所附权利要求书中使用的术语“和/或”是指相关联列出的项中的一个或多个的任何组合以及所有可能组合,并且包括这些组合。
[0122]
本领域普通技术人员可以意识到,结合本文中所公开的实施例描述的各示例的单元及算法步骤,能够以电子硬件、计算机软件或者二者的结合来实现,为了清楚地说明硬件和软件的可互换性,在上述说明中已经按照功能一般性地描述了各示例的组成及步骤。专业技术人员可以对每个特定的应用来使用不同方法来实现所描述的功能,但是这种实现不应认为超出本发明的范围。
[0123]
以上所揭露的仅为本技术较佳实施例而已,当然不能以此来限定本技术之权利范围,因此依本技术权利要求所作的等同变化,仍属本技术所涵盖的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。