1.本发明涉及仿生鱼技术领域,特别是涉及一种可清理水族馆垃圾的仿生鱼装置。
背景技术:
2.水族馆或水族箱能够给水生生物提供生活的环境,但是会因生命活动而产生垃圾,例如鱼粪等微小悬浮物,这些悬浮物通常通过定点的浴缸过滤器实现过滤,但是由于过滤器安放位置固定,对于远离过滤器的位置清洁效果明显不足,存在清洁死角。而这些水中垃圾无法通过人力高效便捷的完成清理,由于垃圾所在的环境是模拟海洋环境,若是人工清理可能会对模拟环境产生难以估计的损失。
3.现有市场上的仿生鱼多数只能用于清理水面上的垃圾,对于水族馆水中的微小垃圾来说并不适用,而且一般的仿生鱼游动起来并不灵活,仿生性不高,工作效率较低,运动范围不足,导致清理不彻底容易残留。同时单靠仿生鱼清理垃圾需要不停地召回进行更换或者排空,以便持续使用,如此会耽误时间,影响工作效率,非常的不方便。
技术实现要素:
4.本发明所要解决的技术问题是,克服现有技术的不足,提供一种可清理水族馆垃圾的仿生鱼装置,它仿生性较高,便于对水中的垃圾进行全方位清理,省时省力,有效提高了清理效率。
5.为了解决上述技术问题,本发明的技术方案是:
6.一种可清理水族馆垃圾的仿生鱼装置,它包括基站和仿生鱼,所述仿生鱼包括从前至后依次连接的鱼头部、鱼骨部、鱼尾部以及设置在鱼头部两侧的鱼鳍部,所述鱼鳍部能够控制仿生鱼的转向和升降;
7.所述鱼头部包括鱼头壳体以及设置在鱼头壳体内的动力装置和收集装置,所述动力装置和鱼尾部之间设置有两根分别穿过鱼骨部两侧的拉线,所述动力装置通过拉线能够驱动鱼骨部和鱼尾部实现波形摆动;
8.所述鱼骨部内设置有滤袋,所述滤袋前端与收集装置连通,所述收集装置能够将水中的垃圾收集进滤袋中;
9.所述基站装于水中某个定点位置,所述仿生鱼可游动至基站处并使鱼头部和基站形成对接,再把滤袋中的垃圾转移到基站内以作集中处理。
10.进一步,所述基站包括抽水泵、与抽水泵连通的滤箱以及与滤箱连通的传输管,所述抽水泵能够将附近的垃圾吸入滤箱内,所述鱼头部能够和传输管对接进行垃圾转移。
11.进一步,所述收集装置包括设置在鱼头壳体内下半部的收集管,安装在收集管内的第二电机,以及安装在第二电机输出端上的螺旋叶;
12.所述收集管前端口穿过鱼头壳体,所述收集管后端与滤袋连通;
13.所述第二电机控制螺旋叶正转时可吸入垃圾,所述收集管和传输管对接后,所述第二电机控制螺旋叶反转可进行垃圾转移。
14.进一步,所述动力装置包括设置在鱼头壳体内上半部的电池和第一舵机,所述第一舵机输出端上安装有第一锥齿轮,所述鱼头壳体上还转动安装有与第一锥齿轮垂直配合的第二锥齿轮,所述第二锥齿轮上同轴连接有双层转盘,所述双层转盘内设置有两个线轴,两根所述拉线分别连接在两个线轴上;
15.所述电池用于为整体供电,所述第一舵机通过控制第一锥齿轮来回转动,进而带动第二锥齿轮和双层转盘来回转动,再通过两个线轴来回拉动两根拉线从而驱动鱼骨部和鱼尾部实现波形摆动。
16.进一步,所述鱼鳍部包括设置在鱼头壳体内部两侧的两个第二舵机,以及安装在两个第二舵机输出端上并分布于鱼头壳体外部两侧的两个鱼鳍罩体;每个所述鱼鳍罩体内还设置有第一电机,每个所述第一电机输出端上都安装有螺旋桨;
17.所述第二舵机可控制鱼鳍罩体转动来调整仿生鱼的俯仰游动角度,所述第一电机可控制螺旋桨转动来提供升降以及转向的动力。
18.进一步,所述鱼骨部包括呈螺旋式环绕分布的主架体以及连接在主架体上下两侧的多个连杆架,两根所述拉线分别从主架体两侧穿过。
19.进一步,所述传输管入口处还设置有聚拢罩。
20.进一步,所述基站上设置有红外发出模组,所述鱼头壳体内设置有红外接收模组。
21.进一步,所述主架体采用柔性材料制成。
22.进一步,所述鱼尾部采用柔性材料制成。
23.采用了上述技术方案,本发明具有以下的有益效果:
24.1.本发明通过鱼头壳体内的收集装置以及鱼骨部内的滤袋,方便仿生鱼直接在水中进行垃圾的收集,替代了人工清理,省时省力。
25.2.本发明的仿生鱼通过动力装置和拉线驱动鱼骨部和鱼尾部实现波形摆动,有效提高了仿生性;并通过鱼鳍部的转动以及其内的螺旋桨等结构设计,使得仿生鱼能够灵活地转向和升降,可在水中作任意向的高速游动,进一步提高了仿生性和清理效率,扩大了清理范围,使清理更充分。
26.3.本发明通过仿生鱼和基站相配合使用,利于仿生鱼的持续工作,不影响工作效率;且基站也能够自行收集附近区域的垃圾,为整体清理工作提供了更多便捷,提高了工作效率。
27.4.本发明的仿生鱼结构设计仿生性较高,非常接近真实的鱼类,因此作为水族箱内的垃圾清理装置能够具有更好的隐蔽性和观赏性。
附图说明
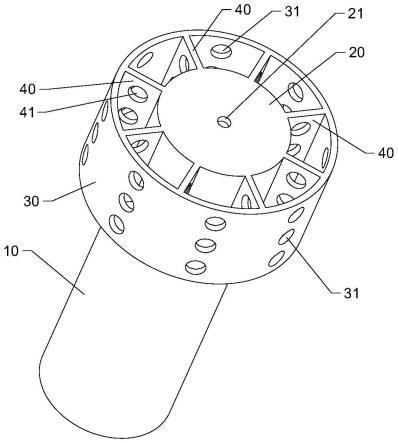
28.图1为本发明仿生鱼的整体结构示意图;
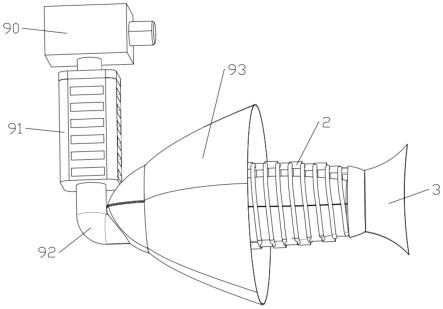
29.图2为本发明基站的结构示意图;
30.图3为本发明基站的另一侧视角图;
31.图4为本发明仿生鱼和基站的对接状态图;
32.图5为本发明仿生鱼的侧面结构示意图;
33.图6为本发明仿生鱼的俯视示意图;
34.图7为本发明仿生鱼的前侧结构示意图;
35.图8为本发明鱼头壳体的内部结构图;
36.图9为图8中结构的底侧视角图;
37.图10为本发明鱼头壳体内部的局部结构图;
38.图11为本发明双层转盘的结构示意图;
39.其中,1.鱼头部;10.鱼头壳体;11.红外接收模组;2.鱼骨部;20.主架体;21.连杆架;3.鱼尾部;4.鱼鳍部;40.第二舵机;41.鱼鳍罩体;42.第一电机;43.螺旋桨;5.拉线;6.滤袋;70.电池;71.第一舵机;72.第一锥齿轮;73.第二锥齿轮;74.双层转盘;75.线轴;80.收集管;81.第二电机;82.螺旋叶;90.抽水泵;91.滤箱;92.传输管;93.聚拢罩;94.红外发出模组。
具体实施方式
40.为了使本发明的内容更容易被清楚地理解,下面根据具体实施例并结合附图,对本发明作进一步详细的说明。
41.如图1-11所示,在本实施例中,提供一种可清理水族馆垃圾的仿生鱼装置,它由基站和仿生鱼两部分组成。其中基站直接装在水中的某个定点位置,而仿生鱼可游动至基站处完成对接,然后把收集到的垃圾转移到基站内以作集中处理,这样可以省去仿生鱼来来回回的更新清空体内空间,方便仿生鱼持续进行清理工作,能够大大提高工作效率。而为了使仿生鱼在水中能够保持合理姿态,可通过身体内部空腔设计和材料密度选择调整鱼的重心。
42.本实施例中的仿生鱼具体由从前至后依次连接的鱼头部1、鱼骨部2、鱼尾部3以及设置在鱼头部1两侧的鱼鳍部4所组成,而两侧的鱼鳍部4能够控制仿生鱼的转向和升降。鱼头部1具体又包含鱼头壳体10以及设置在鱼头壳体10内的动力装置和收集装置,动力装置和鱼尾部3之间连接有两根分别穿过鱼骨部2两侧的拉线5。仿生鱼游动时,由动力装置带动两根拉线5进而驱动鱼骨部2和鱼尾部3实现波形摆动,如此提高仿生性。同时,在鱼骨部2内设置有滤袋6,滤袋6前端与收集装置连通,收集装置能够将水中的垃圾收集进滤袋6中,滤袋6上具有很多微小孔洞,可以最大限度利用滤袋6的空间进行收集。仿生鱼可替代人工清理,在水族馆的水中进行微小垃圾的收集,省时又省力,时刻保持水中环境的健康。当滤袋6收集满后,无需上岸更换,可让仿生鱼游动至基站处并使鱼头部1和基站形成对接,再把滤袋6中的垃圾转移到基站内以作集中处理。
43.本实施例中的基站具体由抽水泵90、滤箱91和传输管92组成,滤箱91与抽水泵90连通,传输管92与滤箱91连通。抽水泵90在平时进行抽吸工作时能够将附近的垃圾吸入到滤箱91内,进一步为整体清理工作提供了便捷,提高了整体的工作效率。而当仿生鱼收集满垃圾需要转移时,只需把鱼头部1的收集口与传输管92对接,再通过抽水泵90抽吸即可。当然,滤箱91的体积要远大于滤袋6,可以坚持很长一段时间再进行集中清理一次性更换,为仿生鱼的持续工作提供了便捷。
44.为了扩大基站收纳垃圾的范围,在传输管92入口处还设置有喇叭状的聚拢罩93,这样不仅能扩大基站吸入垃圾的范围,还能为仿生鱼对接转移垃圾时提供便捷,利于快速地对准位置。确切的说,在靠近基站的聚拢罩93时,仿生鱼会被水流带动朝聚拢罩93飘去,最终在聚拢罩93的引导下,能够快速准确地将鱼嘴和传输管92进行对接。
45.具体地,本实施例中的收集装置包含收集管80、第二电机81和螺旋叶82,第二电机81采用防水电机。其中收集管80设置在鱼头壳体10内下半部,第二电机81安装在收集管80内部,螺旋叶82安装在第二电机81输出端上,收集管80前端口穿过鱼头壳体10露出,收集管80后端与滤袋6连通。如此设置,在工作时,由第二电机81控制螺旋叶82正转时可吸入垃圾,垃圾通过收集管80再进入滤袋6中。而当需要转移垃圾时,由收集管80直接插到传输管92上形成对接连通,再通过第二电机81控制螺旋叶82反转即可传出垃圾,加上抽水泵90的吸入作用就能轻松完成垃圾转移。
46.具体地,本实施例中的动力装置包含设置在鱼头壳体10内上半部的电池70和第一舵机71,电池70能够为整体供电,鱼头壳体10中间有块分隔板,上半部为密闭防水空间,而电池70和第一舵机71都设置在其内。当然,为了仿生鱼能持续供电,可采用无线充电技术,例如在基站上设置无线充电模块,当仿生鱼与基站对接时可进行水下无线充电,无需到岸上再进行更换。同时,第一舵机71输出端方向朝后,在第一舵机71输出端上安装有第一锥齿轮72,在鱼头壳体10的分隔板上还转动安装有与第一锥齿轮72垂直配合的第二锥齿轮73,第二锥齿轮73底端还同轴连接有一个双层转盘74,而双层转盘74内设置有两个线轴75,两根拉线5的前端刚好分别连接在两个线轴75上。如此设置,当第一舵机71控制第一锥齿轮72来回转动时,会带动第二锥齿轮73和双层转盘74来回转动,再通过两个线轴75来回拉动两根拉线5,从而驱动鱼骨部2和鱼尾部3实现波形摆动,进而使仿生鱼进行仿生机械游动。
47.具体地,本实施例的鱼鳍部4是这样控制仿生鱼的转向和升降的,鱼鳍部4具体包含两个第二舵机40、两个鱼鳍罩体41、两个第一电机42和两个螺旋桨43。其中两个第二舵机40设置在鱼头壳体10内部两侧,两个鱼鳍罩体41安装在两个第二舵机40输出端上并分布于鱼头壳体10外部两侧,两个第一电机42分别设置在两个鱼鳍罩体41内,两个螺旋桨43分别安装在两个第一电机42输出端上。第二舵机40可控制鱼鳍罩体41进行全方位转动,进而可调整仿生鱼的俯仰游动角度,而第一电机42可控制螺旋桨43转动来提供升降以及转向的动力。具体地说,需要向哪个方向游动,第二舵机40都能控制鱼鳍罩体41转动到相应的俯仰角度,而转向则由两边的螺旋桨43的转速差来实现,同时,螺旋桨43不仅能提供升降力,还能提供向前的推力,与动力装置配合使用能够大大提高游动速率和灵活性。如此设置,使得仿生鱼能够更加灵活地转向和升降,可在水中作任意向的高速游动,进一步提高了仿生性和清理效率,扩大了清理范围,使清理更充分。
48.为了进一步提高仿生性,本实施例中的鱼骨部2具体由主架体20和多个连杆架21组成,两根拉线5分别从主架体20两侧穿过。其中主架体20模拟弹簧外形,设计呈螺旋式环绕分布,多个连杆架21连接在主架体20上下两侧,以保证上下的稳定性。如此配合拉线结构使用,能够进一步提高仿生运动的合理性。
49.为了更快地实现定位配合,在本实施例的基站上设置红外发出模组94,在鱼头壳体10内设置有红外接收模组11,如此当仿生鱼收集满垃圾后,能够更快速的实现定位找准,利于更快速的完成垃圾转移,节省了不必要的时间。
50.为了提高仿生鱼的柔韧性,本实施例中的主架体20和鱼尾部3均采用柔性材料制成,可减轻垃圾重量对整体游动的影响,提高仿生性。
51.在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施
例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
52.以上的具体实施例,对本发明解决的技术问题、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。