1.本发明涉及炼钢自动化技术领域,特别涉及一种钢包底吹的协调控制系统及方法。
背景技术:
2.钢包底吹是炼钢工艺中快速实现钢液脱气和去除非金属夹杂物的炉外精炼方法。
3.在这项工艺中,需要在坐包完成后接通底吹快速接头,以及吊包开始前拔掉底吹快速接头的操作,这项工作往往需要数名工人,在现场指挥并手动操作。虽然在很多场合,使用底吹机械对接接头的插拔替代了人工,但仍需要现场留人,根据天车坐包、吊包工况,协调指挥并操作钢包底吹设备的开吹和停吹。这个工作流程对人员依赖较大,也存在人员安全隐患。
技术实现要素:
4.为了解决现有技术的问题,本发明提供了一种钢包底吹的协调控制系统及方法。
5.一方面,提供了一种钢包底吹的协调控制系统,所述系统包括:钢包底吹设备、钢包车、天车、钢包和工艺视觉装置;
6.所述钢包车上可拆卸连接有底吹机械对接接头,所述钢包与所述底吹机械对接接头一端可拆卸连接,所述天车位于所述钢包上方,用于吊运所述钢包,所述钢包底吹设备通过输送管线与所述底吹机械对接接头可拆卸连接;
7.所述钢包底吹设备与所述工艺视觉装置通信连接。
8.进一步地,所述系统还包括:精炼炉主控制室;
9.所述精炼炉主控制室经过钢包底吹设备与所述工艺视觉装置通信连接。
10.进一步地,所述工艺视觉装置为耐高温工业级摄像头单元,ip65防护。
11.另一方面,提供了一种钢包底吹的协调控制方法,通过上述一种钢包底吹的协调控制系统进行控制,所述方法包括:
12.在现场设定指定区域,
13.所述天车将所述钢包吊运到所述钢包车的指定位置,所述钢包与底吹机械对接接头对接,
14.所述钢包车带动所述钢包运行至所述指定区域,
15.所述工艺视觉装置对所述指定区域进行实时拍摄,动态感知所述天车、所述钢包车和所述钢包在所述指定区域内的移动,
16.所述工艺视觉装置拍摄到坐包完成后,发送坐包完成信号至钢包底吹设备,所述钢包底吹设备接收到所述坐包完成信号后按照预先设定的流量和压力输送工艺氩气或氮气至所述钢包,
17.精炼完成实施吊包,将所述天车与所述钢包连接,
18.所述工艺视觉装置拍摄到所述天车与所述钢包连接后,发送吊包开始信号至所述
钢包底吹设备,所述钢包底吹设备接收到所述吊包开始信号后关闭,
19.关闭后,所述天车将所述钢包吊运。
20.进一步地,所述方法还包括:
21.所述工艺视觉装置拍摄到坐包完成后,同时通过钢包底吹设备发送所述坐包完成信号至精炼炉主控制室,提供坐包信号反馈。
22.进一步地,所述方法还包括:
23.所述工艺视觉装置拍摄到所述天车与所述钢包连接后,同时通过钢包底吹设备发送所述吊包开始信号至精炼炉主控制室,提供吊包信号反馈。
24.本发明实施例提供的技术方案带来的有益效果是:本发明中,使用底吹机械对接接头来替代人工插拔的基础上,通过工艺视觉装置,动态感知天车、钢包车和钢包在指定区域内的移动,从而系统控制钢包底吹设备的开吹和停吹,实现了钢包车坐包、吊包的动态感知和钢包底吹的自动协调控制,无需底吹作业人员到现场,也无需在钢包车上增加其它的传感器和执行器件,保证了现场操作人员的安全,钢包底吹设备自动可靠工作与停止,既节约了工艺气源消耗,又一定程度上提高了炼钢节奏,提高了工作效率。
附图说明
25.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
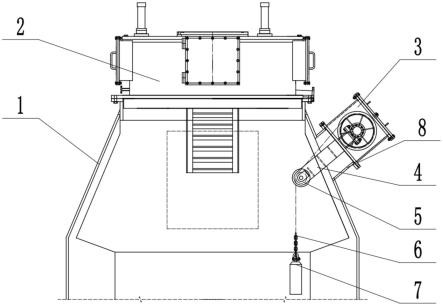
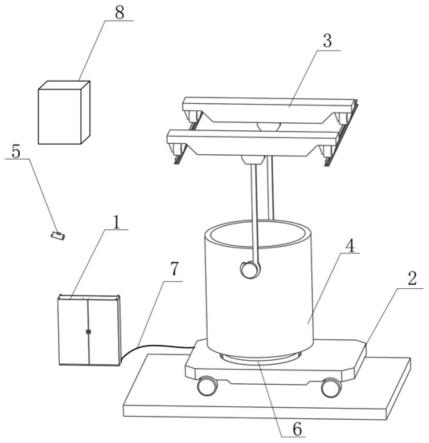
26.图1是本发明提供的一种钢包底吹的协调控制系统的结构示意图。
27.附图标记:1-钢包底吹设备,2-钢包车;3-天车;4-钢包;5-工艺视觉装置;6-底吹机械对接接头;7-输送管线;8-精炼炉主控制室。
具体实施方式
28.为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明实施方式作进一步地详细描述。
29.参见图1,一种钢包底吹的协调控制系统,包括:钢包底吹设备1、钢包车2、天车3、钢包4、工艺视觉装置5和精炼炉主控制室8;钢包车2上可拆卸连接有底吹机械对接接头6,钢包4与底吹机械对接接头6一端可拆卸连接,天车3位于钢包4上方,用于吊运钢包4,钢包底吹设备1通过输送管线7与底吹机械对接接头6可拆卸连接;钢包底吹设备1与工艺视觉装置5通信连接,精炼炉主控制室8经过钢包底吹设备1与工艺视觉装置5通信连接。其中,工艺视觉装置5为耐高温工业级摄像单元,ip65防护。
30.本发明的完整工作流程可以为:步骤(1):在现场设定指定区域;步骤(2):预先在工艺视觉装置5中储存好钢包4与钢包车2上的底吹机械对接接头6在指定区域连接好的第一照片或视频,以及天车3与钢包4的连接好的第二照片或视频;步骤(3):工作人员通过天车3将钢包4吊运到钢包车2的指定位置,与底吹机械对接接头6对接,此过程叫做坐包,钢包车2带动钢包4运行至指定区域;步骤(4):工艺视觉装置5对指定区域进行实时拍摄,动态感知天车3、钢包车2和钢包4在指定区域内的移动,并将拍摄的照片或视频与第一照片或视频
进行对比,当钢包车2带动钢包4到达指定区域内后,钢包车2停止,此时说明坐包完成,工艺视觉装置5拍摄到坐包完成后,发送坐包完成信号至钢包底吹设备1,同时经过钢包底吹设备1发送坐包完成信号至精炼炉主控制室8,提供坐包信号反馈,钢包底吹设备1接收到坐包完成信号后按照预先设定的流量和压力将工艺氩气或氮气通过输送管线7输送至底吹机械对接接头4,然后到透气砖,最后到钢包4,从而自动提供快充功能;步骤(5):精炼完成实施吊包,工作人员将天车3与钢包4连接,工艺视觉装置5对指定区域进行实时拍摄,动态感知天车3、钢包车2和钢包4在指定区域内的移动,并将拍摄的照片或视频与第二照片或视频进行对比,工艺视觉装置5拍摄到天车3与钢包4连接后,发送吊包开始信号至钢包底吹设备1,同时通过钢包底吹设备1发送吊包开始信号至精炼炉主控制室8,提供吊包信号反馈,钢包底吹设备1接收到吊包开始信号后关闭;步骤(6):关闭后,天车3将钢包4吊运。
31.值得说明的是,本发明中,使用底吹机械对接接头6来替代人工插拔的基础上,通过工艺视觉装置5动态感知天车3、钢包车2和钢包4在指定区域内的移动,从而系统控制钢包底吹设备1的开吹和停吹,实现了钢包车2坐包、吊包的动态感知和钢包底吹的自动协调控制,无需底吹作业人员到现场,也无需在钢包车上增加其它的传感器和执行器件,保证了现场操作人员的安全,钢包底吹设备自动可靠工作与停止,既节约了工艺气源消耗,又一定程度上提高了炼钢节奏,提高了工作效率。
32.上述本发明实施例序号仅仅为了描述,不代表实施例的优劣。
33.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。