:
1.本实用新型属于水下机器人技术领域,具体涉及一种水下清淤系统。
背景技术:
2.养鱼先养水,养水先养底”的养殖观念已经深入到广大养殖户和水产养殖工作者的心中,保持底质良好已经成为安全养殖与高产养殖的重要环节。许多养殖鱼的池塘多年未进行清淤,随着养殖密度的增大,产量的提高,鱼类排泄出的粪便、饲料残渣等有机废物堆积在池底,池底淤泥少则半米,多的一米以上,为病菌寄生虫的繁殖创造了条件,致使在养殖过程中水质易恶化,病害频发,给养殖生产造成巨大损失,清淤已成为当前水产养殖业的重要问题。
3.现有清淤方式主要有干塘清淤、泥浆泵清淤、履带机器人清淤等方式。干塘清淤一般要在冬季成鱼起捕后池空、水干的情况下采用工程机械进行清淤,工程量大、受环境制约;泥浆泵方式是将泥浆泵垂直吊放到水底进行清淤,像网箱底部无法完成清淤;履带机器人清淤则需要淤泥厚度不能过厚,地质较硬,否则机器人会下陷到淤泥当中无法行走,受水底地形、地质制约较大。履带式水下机器人在硬质地质的区域清淤效果较好,但遇到较厚的淤泥时会遇到以下问题:(1)由于淤泥承载力有限,履带式水下机器人的履带会下陷到淤泥当中无法行进,越陷越深,同时水下地形复杂,遇到沟壑、巨石、巨木等障碍物履带式水下机器人无法越过去,越障能力较差;(2)工作时,履带式水下机器人的脐带缆与吸污管道拖地,对机器人前进形成较大阻力,严重影响其工作范围;(3)污泥泵一般搭载在履带式水下机器人上,造成设备重量大,供电要求高,信号干扰等影响;(4)对于污泥泵与机器人分离的系统,污泥泵一般置于水上,对吸程产生影响;(5)履带式水下机器人重量较大,且在水中无法上升、下降,导致其布放回收过程十分麻烦,工程量大。
技术实现要素:
4.本实用新型的目的在于寻求一种水下清淤系统,其将污泥泵与水下机器人分离,同时将。
5.为了实现上述目的,本实用新型涉及的一种水下清淤系统,包括水下清淤机器人、柔性吸水管、线缆浮体、脐带缆、污泥泵、排污管、污泥泵电缆和操作平台,水下清淤机器人通过脐带缆与操作平台上的控制中心连接,污泥泵通过污泥泵电缆与操作平台连接,污泥泵进水口通过柔性吸水管连通水下清淤机器人上的吸污头,污泥泵出水口与排污管连通,通过排污管外排,柔性吸水管和脐带缆捆扎在一起,线缆浮体固定在柔性吸水管和脐带缆上,工作时,污泥泵与水下清淤机器人分离悬挂在水中,柔性吸水管和脐带缆s形漂浮在水中。
6.本实用新型涉及的水下清淤机器人,包括水下机器人本体、底部滑板、电动推杆、吸污头和支撑架;底部滑板安装在框架底部,置于水下机器人本体前端的吸污头通过支撑架与水下机器人本体转动连接,电动推杆固定端固定在水下机器人本体上,电动推杆自由
端与支撑架中部连接,推动支撑架带动吸污头绕转动点前后转动。
7.具体地,吸污头包括吸污头壳体、过滤网、吸污口和吸污水下摄像机,吸污头壳体底部开口,吸污头壳体上部采用透明板材,过滤网固定在吸污头壳体底部开口处,与吸污头壳体围成容纳污泥的污泥腔,在吸污头壳体顶部安装至少一个与污泥腔连通的吸污口,吸污口通过管道与吸污泵连接,吸污水下摄像机倾斜固定在透明吸污头壳体上且吸污水下摄像机透明视窗对准吸污头壳体上部的透明板材,用于采集污泥腔前端图像数据。
8.具体地,支撑架包括第一固定板、第二固定板、第一支撑杆和第二支撑杆,第一支撑杆两端分别与第一固定板和第二固定板铰接,第二支撑杆两端分别与第一固定板和第二固定板铰接,第一固定板、第一支撑杆、第二固定板和第二支撑杆围成平行四边形结构,第一固定板水平固定在水下机器人本体上,第二固定板固定在吸污头吸污头壳体上,电动推杆固定端固定在水下机器人本体上,电动推杆自由端与第一支撑杆中部连接,电动推杆伸缩带动支撑架绕第一固定板上的铰接点前后转动。
9.优选地,吸污头通过左右两个平行四边形支撑架与水下机器人本体连接,连接杆两端分别与两支撑架的第一支撑杆中部连接,电动推杆自由端与连接杆中部连接。
10.为了提高污泥的处理面积,吸污头的长度大于等于水下清淤机器人的宽度,在吸污头壳体顶部设置两个吸污口口。
11.具体地,吸污水下摄像机为集成照明水下摄像机,自带照明灯。
12.具体地,水下机器人本体包括框架、推进器、电子舱、照明灯、前视声纳、水下摄像机、吊环、水下gps和浮体,电子舱固定在框架,电子舱分别与推进器、电动推杆、照明灯、前视声纳、水下摄像机和水下gps连接,电子舱通过脐带缆连接控制中心,实时发送水下清淤机器人采集的信息到控制中心,接收控制中心的控制指令,控制相关部件工作,推进器固定在框架1上,与水下摄像机配合的照明灯固定在框架前侧,水下摄像机固定在框架前侧上方位置,用于采集近距离或能见度高的环境中的图像信息,前视声纳固定在框架前侧上方位置,用于采集远距离或能见度低的环境中的图像信息,水下gps固定在框架上,用于实时水下定位获取水下清淤机器人的航向和相对位置,浮体固定在框架顶部。
13.具体地,浮体采用低密度耐压材料,在高压环境下吸水率低,在水下机器人顶部固定吊钩。
14.优选地,推进器包括第一水平推进器、第二水平推进器、第三水平推进器、第四水平推进器、第一垂直推进器、第二垂直推进器、第三垂直推进器和第四垂直推进器,在框架1上同一水平面上设置第一水平推进器、第二水平推进器、第三水平推进器和第四水平推进器四个水平推进器且第一水平推进器、第二水平推进器、第三水平推进器和第四水平推进器呈中心对称,第一水平推进器和第二水平推进器置于水下清淤机器人前端,第三水平推进器和第四水平推进器置于水下清淤机器人后端,第一水平推进器和第二水平推进器的螺旋桨一端向x轴倾斜30
°‑
45
°
,第三水平推进器和第四水平推进器的螺旋桨一端朝向x轴倾斜30
°‑
45
°
放置,在框架1同一水平面上对称设置第一垂直推进器、第二垂直推进器、第三垂直推进器和第四垂直推进器四个垂直推进器。
15.具体地,框架为三层结构,从下向上依次为第一层、第二层和第三层,底部滑板固定在第一层底部,相当于第一层底板,电子舱安装在第一层中部,第一水平推进器、第二水平推进器、第三水平推进器和第四水平推进器对称安装在第二层内,第一垂直推进器、第二
垂直推进器、第三垂直推进器和第四垂直推进器对称固定在框架外侧,浮体安装在第三层内,第一固定板固定在第一层底部前端,倾斜设置的电动推杆固定端固定在底板前端,电动推杆自由端与支撑架中部连接。
16.本实用新型与现有技术相比具有以下有益效果:采用滑板式行进原理,在低承载力的淤泥上可自由滑行,环境适应性强,受地形制约小;水下地形复杂,会遇到很多障碍物,水下机器人在水中可上下浮动、自由行进,越障能力强,可钻入网箱底部清淤;水下机器人水下重量较小,在水中可上下浮动,可游到水面进行布放回收,操作简单。
附图说明:
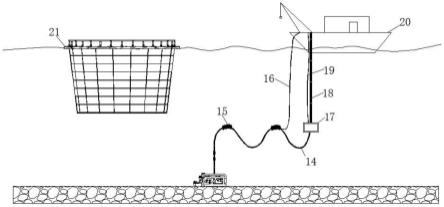
17.图1为实施例1涉及的水下清淤系统结构示意图。
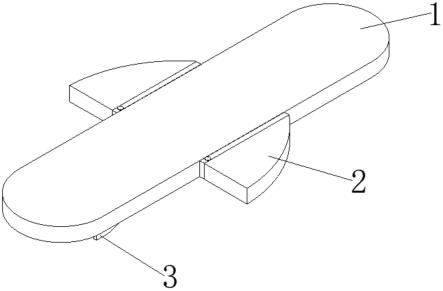
18.图2为实施例1涉及的水下清淤机器人结构示意图。
19.图3为实施例1涉及的吸污头连接结构示意图。
具体实施方式:
20.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例,基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
21.实施例1
22.如图1所示,本实施例涉及的水下清淤系统,包括水下清淤机器人、柔性吸水管14、线缆浮体15、脐带缆16、污泥泵17、排污管18、污泥泵电缆19和操作平台20,水下清淤机器人通过脐带缆16与操作平台20上的控制中心连接,污泥泵17通过污泥泵电缆19与操作平台20连接,污泥泵17进水口通过柔性吸水管14连通水下清淤机器人上的吸污头6,污泥泵17出水口与排污管18连通,通过排污管18外排,柔性吸水管14和脐带缆16捆扎在一起,线缆浮体15固定在柔性吸水管14和脐带缆16上,工作时,污泥泵17与水下清淤机器人分离悬挂在水中,在线缆浮体15的作用,柔性吸水管14和脐带缆16s形漂浮在水中,避免柔性吸水管2拖地影响机器人行进,使管道对1水下机器人的运行姿态影响降到最低。
23.污泥泵与水下清淤机器人分离,可避免机器人上安装污泥泵造成机器人体积大,重量大、大功率供电、强电信号干扰、潜水泵震动引起机器人下沉等问题,使用时根据需要将污泥泵潜入水中,可降低对污泥泵吸程要求,加深污泥清洗深度。
24.如图2-3所示,本实施例涉及的水下清淤机器人,包括水下机器人本体、底部滑板4、电动推杆5、吸污头6和支撑架13;底部滑板4安装在框架1底部,置于水下机器人本体前端的吸污头6通过支撑架13与水下机器人本体转动连接,电动推杆5固定端固定在水下机器人本体上,电动推杆5自由端与支撑架13中部连接,推动支撑架13带动吸污头6绕转动点前后转动。
25.具体地,吸污头6包括吸污头壳体601、过滤网602、吸污口603和吸污水下摄像机604,吸污头壳体601底部开口,吸污头壳体601上部采用透明板材,过滤网602固定在吸污头壳体601底部开口处,与吸污头壳体601围成容纳污泥的污泥腔,在吸污头壳体601顶部安装至少一个与污泥腔连通的吸污口603,吸污口603通过管道与吸污泵连接,吸污水下摄像机
604倾斜固定在透明吸污头壳体601上且吸污水下摄像机604透明视窗对准吸污头壳体601上部的透明板材,用于采集污泥腔前端图像数据,根据图像数据调整污泥头的高度。
26.具体地,支撑架13包括第一固定板1301、第二固定板1302、第一支撑杆1303和第二支撑杆1304,第一支撑杆1303两端分别与第一固定板1301和第二固定板1302铰接,第二支撑杆1304两端分别与第一固定板1301和第二固定板1302铰接,第一固定板1301、第一支撑杆1303、第二固定板1302和第二支撑杆1304围成平行四边形结构,第一固定板1301水平固定在水下机器人本体上,第二固定板1302固定在吸污头6吸污头壳体601上,电动推杆5固定端固定在水下机器人本体上,电动推杆5自由端与第一支撑杆1303中部连接,电动推杆5伸缩带动支撑架绕第一固定板1301上的铰接点前后转动,进而实现吸污头6的升降,以便应对凹凸不平的水底。支撑架前后移动时,带动平行四边形结构的四个端点转动,第二固定板1302始终与第一固定板1301平行,第一固定板1301水平固定,第二固定板1302也会一直保持水平,进而保证吸污头6底部的过滤网一直水平。
27.优选地,吸污头6通过左右两个平行四边形支撑架13与水下机器人本体连接,连接杆1305两端分别与两支撑架13的第一支撑杆1303中部连接,电动推杆5自由端与连接杆1305中部连接。
28.为了提高污泥的处理面积,吸污头6的长度大于等于水下清淤机器人的宽度,在吸污头壳体顶部设置两个吸污口603口,以提高处理污泥的速度。具体地,吸污水下摄像机604为集成照明水下摄像机604,自带照明灯。
29.具体地,水下机器人本体包括框架1、推进器2、电子舱3、照明灯7、前视声纳8、水下摄像机9、吊环10、水下gps11和浮体12,电子舱3固定在框架1,电子舱3分别与推进器2、电动推杆5、照明灯7、前视声纳8、水下摄像机9和水下gps11连接,电子舱3通过脐带缆连接控制中心,实时发送水下清淤机器人采集的信息到控制中心,接收控制中心的控制指令,控制相关部件工作,推进器2固定在框架1上,用于带动水下清淤机器人在水下运动,照明灯7固定在框架1前侧且左右对称设置,为水下摄像机9工作提供照明,水下摄像机9固定在框架1前侧上方位置,用于采集近距离或能见度高的环境中的图像信息,前视声纳8固定在框架1前侧上方位置,用于采集远距离或能见度低的环境中的图像信息,水下gps11固定在框架1上,用于实时水下定位获取水下清淤机器人的航向和相对位置,浮体12固定在框架1顶部,浮体12采用低密度耐压材料,在高压环境下吸水率低,以便降低水下机器人重量,在水下机器人顶部固定吊钩。
30.优选地,推进器包括第一水平推进器、第二水平推进器、第三水平推进器、第四水平推进器、第一垂直推进器、第二垂直推进器、第三垂直推进器和第四垂直推进器,在框架1上同一水平面上设置第一水平推进器、第二水平推进器、第三水平推进器和第四水平推进器四个水平推进器且第一水平推进器、第二水平推进器、第三水平推进器和第四水平推进器呈中心对称,第一水平推进器和第二水平推进器置于水下清淤机器人前端,第三水平推进器和第四水平推进器置于水下清淤机器人后端,第一水平推进器和第二水平推进器的螺旋桨一端向x轴倾斜30
°‑
45
°
,第三水平推进器和第四水平推进器的螺旋桨一端朝向x轴倾斜30
°‑
45
°
放置,四个水平推进器相互配合实现水下清淤机器人前进、后退、左转、右转、侧移和定航,在框架1同一水平面上对称设置第一垂直推进器、第二垂直推进器、第三垂直推进器和第四垂直推进器四个垂直推进器,四个垂直推进器相互配合实现水下清淤机器人上
升、下降和定深。八个推进器的结构设计使水下清淤机器人在水下自由游弋,轻松避障,到达网箱底部完成清淤。
31.具体地,框架1为三层结构,从下向上依次为第一层、第二层和第三层,底部滑板4固定在第一层底部,相当于第一层底板,电子舱3安装在第一层中部,第一水平推进器、第二水平推进器、第三水平推进器和第四水平推进器对称安装在第二层内,第一垂直推进器、第二垂直推进器、第三垂直推进器和第四垂直推进器对称固定在框架1外侧,浮体12安装在第三层内,第一固定板1301固定在第一层底部前端,倾斜设置的电动推杆5固定端固定在底板前端,电动推杆5自由端与支撑架中部连接。框架结构设计合理,不但作为支撑结构将所有组件合理安装固定,而且起到防撞保护作用。
32.本实施例涉及的水下清淤系统具体使用过程为:
33.(1)采用操作平台20上的吊机将水下清淤机器人吊放到水中,吊机脱钩,再用吊机将污泥泵17吊到水中,推进器工作水下清淤机器人潜入到合适深度;污泥泵17与水下清淤机器人分离,悬挂在水中。
34.(2)水下清淤机器人游到网箱21底部,到达清淤位置,通过吸污水下摄像机604返回的视频数据调整吸污头的高度,若视频中能够看到过滤网则下移吸污头,观察排污管18的污泥排放量继续调整吸污头高度。
35.(3)推进器工作,水下清淤机器人在水底滑行,污泥泵工作,首先通过过滤网过滤污泥,避免柔性吸水管堵塞,污泥依次沿污泥腔、柔性吸水管、排污管到达操作平台。水下清淤机器人在水中运行过程中,通过前视声纳或水下摄像机实时采集前面环境视频数据,操作人员根据视频数据,控制推进器进行相应移动。
36.(4)完成工作后,先用吊机将污泥泵17吊到操作平台20上,控制水下清淤机器人游到水面,用吊机将水下清淤机器人吊出水面,完成回收工作。本套系统2-3人便可完成操作,操作方便。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。