1.本发明属于动力推进器管理及电动船领域,涉及一种不同功率的船外机的 协同控制方法及装置。
背景技术:
2.船外机是指安装在船体的船舷外侧的推进用发动机,通常悬挂于艉板的外 侧,又称舷外机。燃油类船外机的工作原理是将燃油的化学能通过内燃机转化 为机械能,然后通过机械传动、螺旋桨转换为船前进的动能。
3.现有技术中,大多数燃油式船外机只能单个控制,不同型号的船外机由于 输出功率不相同,用户无法同时控制多个不同型号、不同功率的船外机以相同 功率输出,从而无法维持船体向前行进的稳定性,也无法保持能耗的经济性。
技术实现要素:
4.针对现有技术的不足,本发明提供了一种不同功率的船外机的协同控制 方法:根据用户输入的速度控制指令及不同船外机的最大输出功率,计算各个 船外机的所需实际输出功率,从而维持船体向前行进的稳定性的同时,也保持 了能耗的经济性。
5.同时,本发明还提供了一种不同功率的船外机的协同控制装置,用以同时 控制多个不同功率的船外机。
6.本发明所提供的方法包括以下步骤:
7.s100:判断所述船外机的控制系统是否上电,如果是,执行步骤s200,否 则,执行步骤s900;
8.s200:初始化所述控制系统,所述控制系统包括控制信号采集器、一级控 制板、多个二级控制板、多个船外机、与多个船外机各自对应的多个扭矩传感 器、各个通信接口及各个模数转换接口;
9.接口包括以太网接口、rs485接口、模数转换接口、数模转换接口及电子 继电器控制接口;
10.s300:控制信号采集器采集用户输入的控制指令,并将所述控制指令发送 至多个一级控制板,其中,所述控制指令包括速度控制指令;
11.s400:一级控制板接收所述控制信号采集器所发送的速度控制指令并进行 模数转换,根据速度控制指令及不同船外机的最大输出功率,计算各个船外机 的所需实际输出功率,并向各个二级控制板发送各自对应的船外机的所需实际 输出功率所对应的控制指令;
12.s500:各个二级控制板各自转换各自对应的船外机的所需实际输出功率所 对应的控制指令为模拟信号并发送至船外机;
13.s600:连接至各个船外机推进器的各个扭矩传感器各自采集各自对应的船 外机的输出扭矩数据,并发送扭矩数据至所述一级控制板;
14.s700:所述一级控制板接收各个扭矩传感器的扭矩数据,实时计算各个船 外机的当前输出功率,根据计算结果,实时发送反馈控制指令至各个二级控制 板,用以维持用户设定的速度;
15.s800:判断控制系统是否断电,如果是,执行步骤s900,否则,执行步 骤s300;
16.s900:结束流程。
17.优选地,所述步骤s400包括:
18.s401:设定第一船外机、第二船外机、......、第n船外机各自的最大功率 分别为p1、p2......pn,设定p1、p2......pn之中最小值为pmin,计算船的最大 功率pmax=n*pmin;
19.设置当前的速度为最快速度的x%;
20.s402:根据所设置的x%,计算当前所需的输出功率pc=pmax*x%;
21.s403:计算单个船外机所需输出的平均功率为:
22.pavg=pc/n=(pmax*x%)/n=n*pmin*x%/n=pmin*x%;
23.s404:计算第一船外机所需实际输出功率占当前所需的输出功率pc的百 分比:
24.pc1=(pavg/p1)*100%=((pc/n)/p1)*100%=(((pmax*x%)/n)/p1)*100%=((((n* pmin)*x%)/n)/p1)*100%=pmin*x%/p1*100%;
25.计算第二船外机所需实际输出功率占当前所需的输出功率pc的百分比:
26.pc2=(pavg/p2)*100%=((pc/n)/p2)*100%=(((pmax*x%)/n)/p2)*100%=((((n* pmin)*x%)/n)/p2)*100%=pmin*x%/p2*100%;
27.......
28.计算第n船外机所需实际输出功率占当前所需的输出功率pc的百分比:
29.pcn=(pavg/pn)*100%=((pc/n)/pn)*100%=(((pmax*x%)/n)/pn)*100%=((((n* pmin)*x%)/n)/pn)*100%=pmin*x%/pn*100%;
30.s404:将各个船外机的所需实际输出功率占当前所需的输出功率pc的百 分比,转换为向各个二级控制板发送各自对应的船外机的实际输出功率所对应 的控制指令并发送至各个二级控制板。
31.优选地,n为大于1的自然数。
32.优选地,p1、p2......pn之间不完全相等。
33.优选地,x为不小于0且不大于100的实数。
34.一种不同功率的船外机的协同控制装置,其特征在于,包括控制信号采集 器、一级控制板、多个二级控制板、与多个二级控制板各自对应的多个船外机、 与多个船外机各自对应的多个扭矩传感器,其中:
35.控制信号采集器:用以人机交互并采集用户的操作信号,包括采集船速控 制信号的推杆、采集方向信号的转盘、采集系统通、断电信号的开关;
36.一级控制板:用以接收并处理控制信号,包括:
37.接收各个扭矩传感器的扭矩数据;将控制信号采集器所发送的模拟信号转 换成数字信号;实时计算各个船外机的所需实际输出功率;通过rs485总线发 送指令至各个二级控制板;实时发送反馈控制指令至各个二级控制板,维持用 户设定的速度;
38.二级控制板:通过接口与船外机的油门控制结构连接,用以接收一级控制 板所发
送的船外机控制信号并转换为模拟信号且发送至船外机;
39.船外机:用以提供船体的动力输出;
40.扭矩传感器:连接至船外机的推进器,用以采集船外机的输出扭矩数据, 为一级控制板的反馈控制提供数据。
附图说明
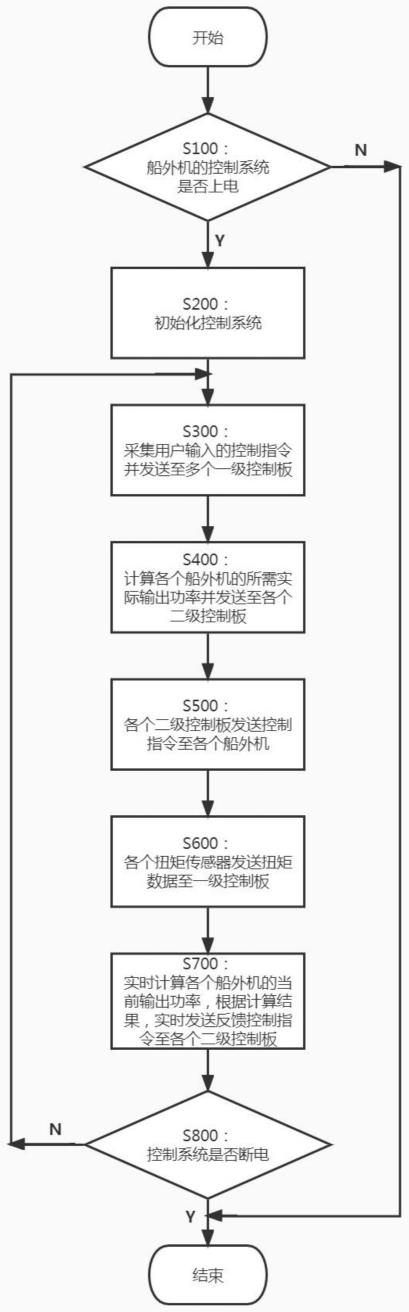
41.图1为本发明所提供的方法的总流程图;
42.图2为本发明所提供的协同控制装置的示意性框图。
具体实施方式
43.图1示出了本发明所提供的方法的总流程图。如图1所示,本发明的方法 包括以下步骤:
44.s100:判断船外机的控制系统是否上电,如果是,执行步骤s200,否则, 执行步骤s900;
45.s200:初始化控制系统,控制系统包括控制信号采集器、一级控制板、多 个二级控制板、多个船外机、与多个船外机各自对应的多个扭矩传感器、各个 通信接口及各个模数转换接口;
46.接口包括以太网接口、rs485接口、模数转换接口、数模转换接口及电子 继电器控制接口;
47.s300:控制信号采集器采集用户输入的控制指令,并将控制指令发送至多 个一级控制板,其中,控制指令包括速度控制指令;
48.s400:一级控制板接收控制信号采集器所发送的速度控制指令并进行模数 转换,根据速度控制指令及不同船外机的最大输出功率,计算各个船外机的所 需实际输出功率,并向各个二级控制板发送各自对应的船外机的所需实际输出 功率所对应的控制指令;步骤s400包括:
49.s401:设定第一船外机、第二船外机、......、第n船外机各自的最大功率 分别为p1、p2......pn,设定p1、p2......pn之中最小值为pmin,计算船的最大 功率pmax=n*pmin;
50.设置当前的速度为最快速度的x%;
51.s402:根据所设置的x%,计算当前所需的输出功率pc=pmax*x%;
52.s403:计算单个船外机所需输出的平均功率为:
53.pavg=pc/n=(pmax*x%)/n=n*pmin*x%/n=pmin*x%;
54.s404:计算第一船外机所需实际输出功率占当前所需的输出功率pc的百 分比:
55.pc1=(pavg/p1)*100%=((pc/n)/p1)*100%=(((pmax*x%)/n)/p1)*100%=((((n* pmin)*x%)/n)/p1)*100%=pmin*x%/p1*100%;
56.计算第二船外机所需实际输出功率占当前所需的输出功率pc的百分比:
57.pc2=(pavg/p2)*100%=((pc/n)/p2)*100%=(((pmax*x%)/n)/p2)*100%=((((n* pmin)*x%)/n)/p2)*100%=pmin*x%/p2*100%;
58.......
59.计算第n船外机所需实际输出功率占当前所需的输出功率pc的百分比:
60.pcn=(pavg/pn)*100%=((pc/n)/pn)*100%=(((pmax*x%)/n)/pn)*100%=((((n* pmin)*x%)/n)/pn)*100%=pmin*x%/pn*100%;
61.s404:将各个船外机的所需实际输出功率占当前所需的输出功率pc的百 分比,转换为向各个二级控制板发送各自对应的船外机的实际输出功率所对应 的控制指令并发送至各个二级控制板。
62.在本发明提供的一个实施例中,设置两个船外机,即,船外机
①
和船外机
ꢀ②
。
63.船外机
①
的总输出功率为30匹马力,船外机
②
的总输出功率为15匹马力。 取两个功率中最小值pmin为15匹马力,那么该系统的理论最大输出功率pmax 为2*15=30匹马力,用户想让船以全速的5%前进,一级控制板就会计算出当 前需要输出功率为pc=pmax*x%=30*5%=1.5匹马力。为保证船是向正前方前 进,那么每个船外机的平均功率pavg都应该控制在:
64.pavg=pc/n=(pmax*x%)/n=n*pmin*x%/n=pmin*x%=15*5%=0.75匹马力,
65.所以,此时船外机
①
应以船外机
①
总输出功率的2.5%输出,即, pmin*x%/p1*100%=(15*5%/30)*100%=2.5%。
66.同理,船外机
②
应以船外机
②
总输出功率的5%输出((1.5/15)*100%=5%)。 一级控制板计算出各个船外机当前需要输出的功率值(换言之,计算出所需实 际输出功率占当前所需的输出功率pc的百分比)后,通过rs485总线将控制 指令发送给船外机对应的二级控制板。
67.s500:各个二级控制板各自转换各自对应的船外机的所需实际输出功率所 对应的控制指令为模拟信号并发送至船外机;
68.s600:连接至各个船外机推进器的各个扭矩传感器各自采集各自对应的船 外机的输出扭矩数据,并发送扭矩数据至一级控制板;
69.s700:一级控制板接收各个扭矩传感器的扭矩数据,实时计算各个船外机 的当前输出功率,根据计算结果,实时发送反馈控制指令至各个二级控制板, 维持用户设定的速度;
70.s800:判断控制系统是否断电,如果是,执行步骤s900,否则,执行步 骤s300;
71.s900:结束流程。
72.本发明还提供了一种不同功率的船外机的协同控制装置。图2示出了本发 明所提供的协同控制装置的示意性框图。如图2所示,一种不同功率的船外机 的协同控制装置100,其特征在于,包括控制信号采集器101、一级控制板102、 多个二级控制板103、与多个二级控制板各自对应的多个船外机104、与多个 船外机各自对应的多个扭矩传感器105,其中:
73.控制信号采集器101:用以人机交互并采集用户的操作信号,包括采集船 速控制信号的推杆、采集方向信号的转盘、采集系统通、断电信号的开关;
74.一级控制板102:用以接收并处理控制信号,包括:
75.接收各个扭矩传感器105的扭矩数据;将控制信号采集器101所发送的模 拟信号转换成数字信号;实时计算各个船外机104的所需实际输出功率;通过 rs485总线发送指令至各个二级控制板103;实时发送反馈控制指令至各个二 级控制板103,维持用户设定的速
度;
76.二级控制板103:通过接口与船外机104的油门控制结构连接,用以接收 一级控制板102所发送的船外机104控制信号并转换为模拟信号且发送至船外 机104;
77.船外机104:用以提供船体的动力输出;
78.扭矩传感器105:连接至船外机104的推进器,用以采集船外机104的输 出扭矩数据,为一级控制板102的反馈控制提供数据。
79.应当理解的是,本发明不限于上述的举例,对本领域普通技术人员来说, 可以根据上述说明加以改进或变换,所有这些改进和变换都应属于本发明所附 权利要求的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。