技术特征:
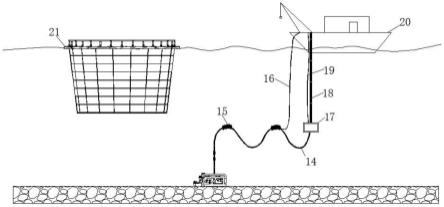
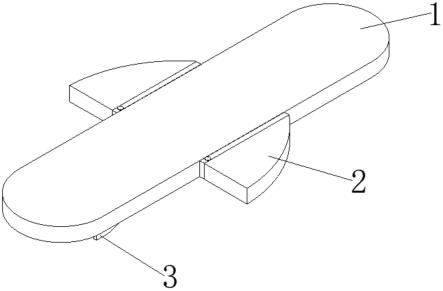
1.一种水下清淤系统,其特征在于,包括水下清淤机器人、柔性吸水管、线缆浮体、脐带缆、污泥泵、排污管、污泥泵电缆和操作平台,水下清淤机器人通过脐带缆与操作平台上的控制中心连接,污泥泵通过污泥泵电缆与操作平台连接,污泥泵进水口通过柔性吸水管连通水下清淤机器人上的吸污头,污泥泵出水口与排污管连通,通过排污管外排,柔性吸水管和脐带缆捆扎在一起,线缆浮体固定在柔性吸水管和脐带缆上,工作时,污泥泵与水下清淤机器人分离悬挂在水中,柔性吸水管和脐带缆s形漂浮在水中。2.根据权利要求1所述的水下清淤系统,其特征在于,包括水下机器人本体、底部滑板、电动推杆、吸污头和支撑架;底部滑板安装在框架底部,置于水下机器人本体前端的吸污头通过支撑架与水下机器人本体转动连接,电动推杆固定端固定在水下机器人本体上,电动推杆自由端与支撑架中部连接,推动支撑架带动吸污头绕转动点前后转动。3.根据权利要求2所述的水下清淤系统,其特征在于,吸污头包括吸污头壳体、过滤网、吸污口和吸污水下摄像机,吸污头壳体底部开口,吸污头壳体上部采用透明板材,过滤网固定在吸污头壳体底部开口处,与吸污头壳体围成容纳污泥的污泥腔,在吸污头壳体顶部安装至少一个与污泥腔连通的吸污口,吸污口通过管道与吸污泵连接,吸污水下摄像机倾斜固定在透明吸污头壳体上且吸污水下摄像机透明视窗对准吸污头壳体上部的透明板材,用于采集污泥腔前端图像数据。4.根据权利要求3所述的水下清淤系统,其特征在于,支撑架包括第一固定板、第二固定板、第一支撑杆和第二支撑杆,第一支撑杆两端分别与第一固定板和第二固定板铰接,第二支撑杆两端分别与第一固定板和第二固定板铰接,第一固定板、第一支撑杆、第二固定板1和第二支撑杆围成平行四边形结构,第一固定板水平固定在水下机器人本体上,第二固定板固定在吸污头壳体上,电动推杆固定端固定在水下机器人本体上,电动推杆自由端与第一支撑杆中部连接,电动推杆伸缩带动支撑架绕第一固定板上的铰接点前后转动。5.根据权利要求4所述的水下清淤系统,其特征在于,吸污头通过左右两个平行四边形支撑架与水下机器人本体连接,连接杆两端分别与两支撑架的第一支撑杆中部连接,电动推杆自由端与连接杆中部连接。6.根据权利要求5所述的水下清淤系统,其特征在于,吸污头的长度大于等于水下清淤机器人的宽度,在吸污头壳体顶部设置两个吸污口,吸污水下摄像机为集成照明水下摄像机,自带照明灯。7.根据权利要求4所述的水下清淤系统,其特征在于,水下机器人本体包括框架、推进器、电子舱、照明灯、前视声纳、水下摄像机、吊环、水下gps和浮体,电子舱固定在框架,电子舱分别与推进器、电动推杆、照明灯、前视声纳、水下摄像机和水下gps连接,电子舱通过脐带缆连接控制中心,实时发送水下清淤机器人采集的信息到控制中心,接收控制中心的控制指令,控制相关部件工作,推进器固定在框架上,与水下摄像机配合的照明灯固定在框架前侧,水下摄像机固定在框架前侧上方位置,用于采集近距离或能见度高的环境中的图像信息,前视声纳固定在框架前侧上方位置,用于采集远距离或能见度低的环境中的图像信息,水下gps固定在框架上,用于实时水下定位获取水下清淤机器人的航向和相对位置,浮体固定在框架顶部。8.根据权利要求7所述的水下清淤系统,其特征在于,浮体采用低密度耐压材料,在高压环境下吸水率低,在水下机器人顶部固定吊钩。
9.根据权利要求8所述的水下清淤系统,其特征在于,推进器包括第一水平推进器、第二水平推进器、第三水平推进器、第四水平推进器、第一垂直推进器、第二垂直推进器、第三垂直推进器和第四垂直推进器,在框架上同一水平面上设置第一水平推进器、第二水平推进器、第三水平推进器和第四水平推进器四个水平推进器且第一水平推进器、第二水平推进器、第三水平推进器和第四水平推进器呈中心对称,第一水平推进器和第二水平推进器置于水下清淤机器人前端,第三水平推进器和第四水平推进器置于水下清淤机器人后端,第一水平推进器和第二水平推进器的螺旋桨一端向x轴倾斜30
°‑
45
°
,第三水平推进器和第四水平推进器的螺旋桨一端朝向x轴倾斜30
°‑
45
°
放置,在框架同一水平面上对称设置第一垂直推进器、第二垂直推进器、第三垂直推进器和第四垂直推进器四个垂直推进器。10.根据权利要求9所述的水下清淤系统,其特征在于,框架为三层结构,从下向上依次为第一层、第二层和第三层,底部滑板固定在第一层底部,相当于第一层底板,电子舱安装在第一层中部,第一水平推进器、第二水平推进器、第三水平推进器和第四水平推进器对称安装在第二层内,第一垂直推进器、第二垂直推进器、第三垂直推进器和第四垂直推进器对称固定在框架外侧,浮体安装在第三层内,第一固定板固定在第一层底部前端,倾斜设置的电动推杆固定端固定在底板前端,电动推杆自由端与支撑架中部连接。
技术总结
本实用新型公开了一种水下清淤系统,包括水下清淤机器人、柔性吸水管、线缆浮体、脐带缆、污泥泵、排污管、污泥泵电缆和操作平台,水下清淤机器人通过脐带缆与操作平台上的控制中心连接,污泥泵通过污泥泵电缆与操作平台连接,污泥泵进水口通过柔性吸水管连通水下清淤机器人上的吸污头,污泥泵出水口与排污管连通,通过排污管外排,柔性吸水管和脐带缆捆扎在一起,线缆浮体固定在柔性吸水管和脐带缆上,工作时,污泥泵与水下清淤机器人分离悬挂在水中,柔性吸水管和脐带缆S形漂浮在水中,使管道对水下机器人的运行姿态影响降到最低。污泥泵与水下清淤机器人分离,使用时根据需要将污泥泵潜入水中,加深污泥清洗深度。加深污泥清洗深度。加深污泥清洗深度。
技术研发人员:刘虎 兰传春 朱家村
受保护的技术使用者:青岛罗博飞海洋技术有限公司
技术研发日:2021.12.31
技术公布日:2022/6/9
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。