1.本发明涉及在利用至少1艘拖船来支持船舶(主船)的离靠岸时,对操纵船舶离靠岸的当事人(即引水员、主船船长、拖船操作员以及地上作业员等)进行支持的系统及方法。
背景技术:
2.以往,当货船、客船等大型船舶(主船)在港湾相对于岸壁靠岸/离岸时,有时至少1艘拖船支持主船的航行。拖船利用架设在其与主船之间的拖船线来牵引、拖拽主船。另外,拖船使自身经由护舷材料(轮胎等)与主船直接接触而推压主船。一边受到这样的拖船对主船进行的压拽,一边由主船船长操作主船。引水员在多数情况下乘船到主船,一边适当使用gps定位装置等航海仪器并用国际vhf(very high frequency:甚高频)无线与拖船操作员、地上作业员取得联络,一边辅助主船船长,将主船安全地引导至目的地场所。
3.在上述那样的基于拖船支持的离靠岸船舶操纵中,当事人的交流在目前情况下是基于相互的目视信息并经由无线收发器进行的。因此,离靠岸船舶操纵的当事人无法充分地共享所需信息,另外,有时会产生双方的联络内容不正确地传递(错误交流)的情况,这些在实现高效的离靠岸的方面成为课题。因此,在专利文献1~4中,提出了想要解决这样的离靠岸船舶操纵中的课题的交流工具。
4.在专利文献1中公开了如下装置:其配置于拖船,对拖船操作员指示拖船应该对主船进行的作业。该装置具有:与以往的无线机同样地用于进行联络的麦克风和扬声器;用文本表示从主船向拖船的指示的小画面;用图形表示与主船相对的拖船的位置及行进方向以及应该对主船进行的拖船的推压作业/牵引作业的区别的大画面。
5.在专利文献2中公开了如下内容:使船舶操纵者和支持者分别携带终端装置,通过该多个终端装置进行通信,从而交换船舶操纵支持信息、船舶操纵指令信息等信息,使各终端装置保有共同的信息。
6.在专利文献3中公开了一种支持系统,该支持系统具有显示部,该显示部在供船舶离靠岸的港湾设施的鸟瞰图中重叠显示船舶的鸟瞰图,并且显示船舶的位置、岸桥与船舶的距离、船舶的对地速度、船首方位、避险线信息、标准航路信息以及与港湾的风或海象相关的信息。
7.在专利文献4中,从船体及其周围的拍摄图像到包括船体及其周围在内的一带的俯瞰图像都显示在设置于船舶的第1显示单元和设置于拖船、关联设备的第2显示单元上。
8.现有技术文献
9.专利文献
10.专利文献1:实开昭61-105298号公报
11.专利文献2:国际公开wo2004/019302a1小册子
12.专利文献3:日本特表2019-512428号公报
13.专利文献4:国际公开wo2019/093416a1小册子
技术实现要素:
14.发明要解决的课题
15.在专利文献1~4中,都没有公开以一目了然地容易理解的方式将拖船的推进器的推力的有无及其方向(以下,称为“推进器的现状”)与主船和拖船的位置及方向一并显示的技术。拖船的推进器的现状可以说在推测作用于拖船的推力和拖船的动作方面是重要的信息。因此,如果当事人掌握该信息并在当事人之间共享该信息,则能够更顺利地进行安全且高效的离靠岸船舶操纵。
16.本发明是鉴于以上的情况而完成的,其目的在于,通过以能够直观理解的方式将搭载于拖船的各推进器的状况与主船和拖船的位置及方向一并提示给参与主船的离靠岸船舶操纵的当事人,能够有助于当事人掌握状况,支持离靠岸船舶操纵。
17.用于解决课题的手段
18.本发明的一个方式的船舶操纵支持系统是主船一边由至少1艘拖船支持主船一边相对于岸壁离岸或靠岸时的船舶操纵支持系统,其特征在于,具有:存储装置,其存储有包含所述岸壁的海图图像、主船图形以及拖船图形;至少1个检测装置,其检测所述主船的位置和方位以及所述拖船的位置和方位;至少1个显示器;以及处理器,其使所述显示器显示船舶操纵支持画面。所述船舶操纵支持画面包含:所述海图图像;所述主船图形,其基于所述检测装置所检测出的所述主船的位置和方位而配置在所述海图图像上;所述拖船图形,其基于所述检测装置所检测出的所述拖船的位置和方位而配置在所述海图图像上;以及拖船推进器信息,其配置在所述拖船图形上,并对搭载于所述拖船的多个拖船推进器中的各个拖船推进器示出由该拖船推进器产生的推进力的方向。
19.并且,本发明的一个方式的船舶操纵支持方法的特征在于,包含如下的步骤:在主船一边由至少1艘拖船支持一边相对于岸壁离岸或靠岸时,对所述主船和所述拖船的船舶操纵进行支持的信息终端的处理器使至少1个显示器显示船舶操纵支持画面,所述船舶操纵支持画面包含:海图图像,其包含所述岸壁;主船图形,其与所述主船的位置和方位对应地配置在所述海图图像上;拖船图形,其与所述拖船的位置和方位对应地配置在所述海图图像上;以及拖船推进器信息,其配置在所述拖船图形上,并对搭载于所述拖船的多个拖船推进器中的各个拖船推进器示出由该拖船推进器产生的推进力的方向。
20.在上述船舶操纵支持系统及方法中,在“配置于拖船图形上的拖船推进器信息”中,除了在画面上以与拖船图形视觉重叠的方式配置的拖船推进器信息以外,还可以包含在海图图像上接近拖船图形而配置成与搭载于拖船的拖船推进器之间的对应在视觉上清楚的拖船推进器信息。
21.根据上述船舶操纵支持系统及方法,在通过在显示器所显示的海图图像上示出的主船图形和拖船图形来示出主船和拖船的位置关系之后,通过拖船推进器信息对各拖船推进器示出由该拖船推进器产生的推进力的方向。这样,在显示器所显示的一个画面中一并图示了示出主船和拖船的位置关系的信息以及示出拖船推进器的状况的信息,因此,看到该画面的当事人能够直观地掌握它们的相互关系。拖船推进器的状况在推测作用于拖船的推力或其方向方面是重要的信息,通过当事人直观且容易地掌握该信息,能够更顺利地进行高效的离靠岸船舶操纵。
22.发明效果
23.根据本发明,由于以能够直观地理解的方式向参与主船的离靠岸船舶操纵的当事人提示主船和拖船的位置和方向以及搭载于拖船的各推进器的状况,因此能够有助于当事人掌握状况,能够支持离靠岸船舶操纵。
附图说明
24.图1是示出本发明的一个实施方式的船舶操纵支持系统的概略结构的图。
25.图2是示出拖船的概略结构的图。
26.图3是示出信息收集装置的结构的框图。
27.图4是示出信息终端的结构的框图。
28.图5是示出处理装置的结构的框图。
29.图6是示出船舶操纵支持画面的图。
30.图7是示出船舶操纵支持画面的图。
31.图8是示出船舶操纵支持画面的图。
32.图9a是示出在主船中设定的推压点的图。
33.图9b是示出在主船中设定的拖拽点的图。
34.图10是示出船舶操纵支持画面的图。
35.图11是示出船舶操纵支持画面的图。
36.图12是示出船舶操纵支持画面的图。
37.图13是示出船舶操纵支持画面的图。
38.图14是示出船舶操纵支持画面的图。
39.图15是示出船舶操纵支持画面的图。
40.图16是示出船舶操纵支持画面的图。
具体实施方式
41.接着,参照附图对本发明的实施方式进行说明。图1是示出船舶操纵支持系统1的概略结构的图。图1所示的船舶操纵支持系统1能够用于由至少1艘拖船3支持的大型船舶(以下,称为“主船2”)的离靠岸船舶操纵。
42.图2是示出拖船3的概略结构的图。如图2所示,本实施方式的拖船3具有船体38,该船体38具有左右一对推进器68。在船体38的内部形成有船员室区域、机舱等(均省略图示)。在船体38竖立设置有桅杆39,在桅杆39设置有远程照相机34。在远程照相机34中,能够对拖船3的前方进行拍摄。各推进器68例如是具有能够360度旋转的可变桨距螺旋桨的方位推进器。能够通过可变桨距螺旋桨的转弯角度来调节推进方向的调整,另外,能够通过可变桨距螺旋桨的桨距角度的调节来调节推进力。但是,上述结构只不过是例示,本发明能够应用于使用了具有通常的方位推进器、施耐德螺旋桨等推进器的拖船3的船舶操纵支持。
43.返回图1,本实施方式的船舶操纵支持系统1具有多个信息终端20、多个信息收集装置30、信息处理装置40以及将它们连接成能够相互进行信息的收发的无线通信网5。
44.信息处理装置40配置于主船2。信息处理装置40也可以配置在陆地上,也可以配置在拖船3上。信息处理装置40可由引水员或主船船长操作。另外,信息终端20可以搭载于主船2和各拖船3上,或者可以由包括引水员、主船船长、拖船操作员以及地上作业员在内的当
事人携带。信息收集装置30分别搭载于主船2、各拖船3以及港湾内的其他船舶。以下,在不区分主船2、各拖船3以及港湾内的其他船舶而进行说明时,有时表示为“船舶”。基于无线通信网5的通信可以是经由陆地或船上的无线基站50的通信,也可以是经由船上的移动基站的通信。
45.【信息收集装置30】
46.图3是示出信息收集装置30的结构的框图。图3所示的信息收集装置30具有计算机31和无线通信装置35。计算机31与各种航海仪器32、各种发动机信息检测器33以及远程照相机34可通信地连接。计算机31将从航海仪器32、发动机信息检测器33以及远程照相机34取得的信息、数据与船舶的识别信息一并经由通信装置35和无线通信网5向信息处理装置40发送。
47.航海仪器32例如包括:包含设置于船舶的规定位置的定位天线的gps定位装置、陀螺罗盘(方位计)、水深计、风向/风速计、船速计以及吃水计。gps定位装置能够接收时刻(协调世界时)以及位置(纬度、经度),并根据这些信息求出对地速度和对地航向。陀螺罗盘能够检测船头方位,并根据从该信息得到的船舶的转弯角度求出转动角速度。主船2的发动机信息检测器33包括舵角、推进轴的转速、侧推进器(stern thruster:艉侧推进器/bow thruster:艏侧推进器)的转速等的检测器。拖船3的发动机信息检测器33包括方位推进器的螺旋桨的转速、螺旋桨轴向等的检测器。
48.远程照相机34设置在船舶的适当位置(参照图1)。搭载于主船2的远程照相机34可以设置为能够从主船2的侧部拍摄岸壁。另外,如上所述,远程照相机34也搭载于拖船3。
49.信息收集装置30也可以是利用了以往搭载于船舶的ais(automatic identification system:自动识别系统)的装置。在该情况下,作为通信装置35,可以利用ais所具有的vhs通信装置(省略图示)。ais是用于自动地以vhf电波收发船舶的数据并掌握周边的船舶的动静的装置。ais收发的信息一般包括所搭载的船舶的动态信息、静态信息及航海相关信息。动态信息一般包括时刻(协调世界时)、位置(纬度、经度)、对地速度、对地航向、与位置精度有关的信息、船头方位、转动角速度以及航海状态。静态信息一般包括mmsi号码(海上移动业务识别号码)、呼叫码、船名、船舶的种类、imo号码、定位天线的位置以及船长和船宽。航海相关信息一般包括船舶的吃水、目的地和目的地到达预测日/预测时刻以及装载危险物的种类。ais是公知的,因此对ais省略其以上的详细说明。
50.【信息终端20】
51.图4是示出信息终端20的结构的框图。图4所示的信息终端20具有计算机21、输入装置23、输出装置24、存储装置25以及通信装置26。计算机21具有处理器211、ram或rom等存储器212、输入控制部213、输出控制部214、盘控制部215、通信控制部216以及其他各种接口217。输入控制部213与输入装置23连接。输入装置23包括触摸面板231和麦克风232。在输入装置23中,也可以包含键盘、指示设备以及按钮、棒状的操作工具中的至少1个。输出控制部214与输出装置24连接。输出装置24包含显示器241和扬声器242。盘控制部215与硬盘等存储装置25连接。通信控制部216与无线通信装置26连接。通信装置26具有收发天线,能够经由该天线和无线基站50而与其他信息终端20、信息处理装置40进行信息的收发。
52.在信息终端20中预先安装有显示程序7。处理器211执行存储器212中存储的程序,并利用经由输入装置23输入的信息、存储于存储器212或存储装置25的信息、经由通信装置
26从外部取得的信息以及经由接口217从外部取得的信息中的至少1个进行运算处理,并将其结果向输出装置24和/或通信装置26输出。
53.【信息处理装置40】
54.图5是示出信息处理装置40的结构的框图。图5所示的信息处理装置40具有计算机41、输入装置43、输出装置44、存储装置45以及通信装置46。计算机41具有处理器411、ram或rom等存储器412、输入控制部413、输出控制部414、盘控制部415、通信控制部416以及其他各种接口417。输入控制部413与输入装置43连接。输入装置43包含触摸面板431和麦克风432。输入装置43也可以包含键盘、指示设备、按钮以及棒状的操作工具中的至少1个。输出控制部414与输出装置44连接。输出装置44包含显示器441和扬声器442。盘控制部415与硬盘等存储装置45连接。通信控制部416与无线的通信装置46连接。通信装置46具有收发天线,能够经由该天线和无线基站50而与信息终端20和信息收集装置30进行信息的收发。处理器411执行存储于存储器412的程序,并利用经由输入装置43输入的信息、存储于存储器412或存储装置45的信息、经由通信装置46从外部取得的信息以及经由接口417从外部取得的信息中的至少1个进行运算处理,并将其结果向输出装置44和/或通信装置46输出。
55.在存储装置45中构建有港湾信息数据库、船体信息数据库以及航海信息数据库。
56.在港湾信息数据库中存储有与主船2入港的港湾相关的信息。与港湾相关的信息包括包含港湾的海图、离靠岸的岸壁的种类、目标靠岸位置、浮标的位置、避险线、标准航路、水深、等深线、潮流、障碍物(例如浅滩、暗礁等构造物)、航行的船舶的必要经由点、航行禁止区域、每个船舶的禁止进入区域以及港湾的局部气象海象等。标准航路可以按每个岸壁或按每个船舶来决定,并预先进行存储。岸壁也可以包括设置于水深较深的海上的作业台等。
57.在船体信息数据库中,与船舶的识别信息相对应地存储有与船舶的特性相关的信息。与船舶的特性相关的信息包括每个船舶的形状特性和运动特性。形状特性包括长度、宽度、外形、基准点的船体相对位置以及定位天线的船体相对位置等。特别是,在主船2的形状特性中,还包括被称为强点(strong point)的推压点的船体相对位置和设置有系柱的拖拽点的船体相对位置。运动特性包括所搭载的推进器及其性能(种类、额定输出)、用于求出推力的运算模型等。
58.在航海信息数据库中,与船舶的识别信息相对应地存储有从搭载在港湾内的船舶上的信息收集装置30取得的信息。另外,在航海信息数据库中,也可以与船舶的识别信息相对应地存储有从搭载在港湾内的船舶上的ais取得的信息。
59.信息处理装置40的计算机41通过执行存储在存储器412或存储装置45中的程序,具有作为信息取得模块、预测位置运算模块、碰撞回避模块、航路计划模块、推力运算模块、语音通话模块以及显示数据生成模块的功能。
60.信息取得模块取得从各信息收集装置30发送的信息,并存储在航海信息数据库中。航海信息数据库的信息在其他运算处理中被读出并被利用。
61.预测位置运算模块根据船舶的当前位置和该船舶的船速及方位,时刻地求出规定时间后的船舶的位置(预测位置)。
62.离靠岸距离运算模块根据船舶的当前位置、港湾信息、船舶的形状特性信息,求出船舶与岸壁的距离。船舶与岸壁的距离可以是船舶与岸壁的距离中的最小值。离靠岸距离
运算模块也可以求出船舶与目标靠岸位置的距离。
63.碰撞回避模块向作为对象的船舶发送信息,以使船舶采取依据海上的用于防止船舶碰撞的船舶运用的规则的回避行动。碰撞回避模块根据船舶的当前位置及预测位置,求出船舶彼此的碰撞风险。另外,碰撞回避模块根据船舶的当前位置、预测位置以及障碍物的位置,求出船舶与障碍物的碰撞风险。碰撞风险例如用数值、等级来表示。碰撞回避模块在碰撞风险超过规定的阈值时,生成警告信息,并将该警告信息经由无线通信网络5向信息终端20发送。在警告信息中,除了作为碰撞警告对象的船舶的信息以外,还可以包含应该对哪个船舶指示怎样的回避行动的信息。
64.航路计划模块基于必要经由点信息(位置、方位、船速)、航行禁止区域信息、海况气象(风力/潮汐力)以及主船动作特性,设定主船2的靠岸或离岸的推荐航路。推荐航路的设定信息包括多个唤醒点、各唤醒点处的主船2的方位及船速、拖船线的连接及连接解除定时。航路计划模块构成为例如使用以港湾的气象、海况以及其他船舶的位置为变量的模型,通过运算求出适当的航路,并将其设定为推荐航路。优选的航路可以是从安全性、经济性等特定的观点来讲优选的航路。或者,航路计划模块可以构成为基于港湾的气象、海况以及其他船舶的位置,从预先得到的几个航路候补中将其中一个设定为推荐航路。或者,航海计划模块可以构成为将由船长、引水员指示的航海计划设定为推荐航路。或者,航海计划模块可以构成为将预先存储的标准航路设定为推荐航路。
65.推力运算模块求出当前在主船2的推进器、侧推进器(艉侧推进器/艏侧推进器)中产生的推力和当前在拖船3的方位推进器中产生的推力。推力包括并行推力和转弯力矩。推力运算模块使用预先提供的运算模型,根据推进器(或侧推进器、方位推进器)的输出(转速)来求出推力。推力运算模块进一步求出在主船2的推进器(包括侧推进器)中产生的推力和在拖船3的推进器中产生的推力等合成后的作用于主船2的推力(主船合成推力)。
66.语音通话模块对由麦克风432拾取的语音进行数字转换并作为语音数据,并将其经由通信装置46向语音通话目的地的信息终端20发送。另外,语音通话模块对从语音通话目的地的信息终端20发送来的语音数据进行模拟转换并从扬声器442输出。
67.船舶操纵状况数据生成模块生成船舶操纵状况数据。船舶操纵状况数据包括在信息处理装置40的显示器441及信息终端20的显示器241中显示的各种船舶操纵支持画面中登载的信息。信息处理装置40的计算机41将生成的船舶操纵状况数据经由通信控制部416和无线通信网5向各信息终端20发送。在各信息终端20的计算机21中,所接收的船舶操纵状况数据被存储于存储器212,处理器211通过执行显示程序7,基于船舶操纵状况数据使显示器241显示至少1种船舶操纵支持画面。另外,在信息处理装置40的计算机41中也可以安装与信息终端20同样的显示程序7。在该情况下,信息处理装置40的计算机41的处理器411通过执行显示程序7,基于船舶操纵状况数据使显示器441显示至少1种船舶操纵支持画面。在信息终端20的显示器241上显示的船舶操纵支持画面和在信息处理装置40的显示器441上显示的船舶操纵支持画面可以被同步。由计算机21、41输出的各种船舶操纵支持画面及其显示方法实质上相同,因此,对信息终端20的显示器241的画面显示进行详细说明,省略与信息处理装置40的显示器441的画面显示相关的说明。
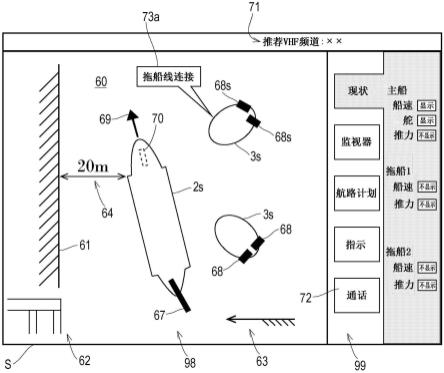
68.图6是在显示器241上显示的船舶操纵支持画面s的一例。船舶操纵支持画面s包括现状显示部98。在现状显示部98中,基于海图信息来显示包含港湾的海图图像60。在海图图
像60中,除了岸壁61之外,还示出浮标、障碍物(均省略图示)等。在海图图像60中也可以示出深度、等深线。
69.在现状显示部98的左下部显示有示出供主船2离靠岸的岸壁的种类的岸壁类别图形62。岸壁的种类一般有重力式岸壁板桩式岸壁、栈桥式岸壁及浮栈桥等。在图6中,作为岸壁类别图形62,示出了栈桥式岸壁的侧面示意图。通过这样用图形表示岸壁类别图形62,当事人能够直观地掌握不容易从作为鸟瞰图的海图图像60读取的岸壁的种类。
70.在现状显示部98的右下部,基于潮流信息,示出表示潮流的流向(方向)的潮流矢量63。潮流矢量63的箭头的方向表示潮流的流向(方向),潮流矢量63的箭头的大小表示潮流的大小。这样,由于潮流不是文本而是由图形表示,因此,当事人能够从现状显示部98直观地掌握潮流。
71.在现状显示部98中,基于主船2的位置信息、方位信息以及形状特性,将示意性地示出主船2的图形(以下,称为“主船图形2s”)与海图图像60重叠地显示。主船图形2s例如是将主船2的俯视时的轮廓图形化的图形。主船2的实际位置及方位与现状显示部98的海图图像60上的主船图形2s的位置及方位是对应的。
72.在现状显示部98中,基于拖船3的位置信息、方位信息以及形状特性,将示意性地示出拖船3的图形(以下,称为“拖船图形3s”)与海图图像60重叠地显示。拖船图形3s例如是将拖船3的俯视时的轮廓图形化的图形。拖船3的实际位置及方位与现状显示部98的海图图像60上的拖船图形3s的位置及方位是对应的。
73.在现状显示部98中,基于主船2的舵角的信息,将示意性地示出舵的舵图形67重叠地显示在主船图形2s上。在配置于主船图形2s上的舵图形67中,除了在现状显示部98上以与主船图形2s视觉重叠的方式配置的舵图形67以外,还可以包含在海图图像60上接近主船图形2s而配置成与主船2的舵的对应在视觉上清楚的舵图形67。
74.现状显示部98上的主船图形2s和舵图形67的相对位置关系与主船2和搭载在其上的舵的相对位置关系是对应的。舵图形67是模仿俯视时的舵板的线段,按照与舵板相对于主船2的船体的舵角对应的角度配置在主船图形2s上。
75.在现状显示部98中,基于主船2的推进器的信息,将示意性地示出推进器的主船推进器图形70与主船图形2s重叠地显示。现状显示部98上的主船图形2s和主船推进器图形70的相对位置关系与主船2和搭载在其上的推进器的相对位置关系是对应的。在图6所例示的现状显示部98中,主船推进器图形70由具有长边方向和短边方向的点划线四边形表示,与主船2的船体上的侧推进器的位置对应地配置在主船图形2s上。但是,主船推进器图形70的外观并不限定于上述内容。另外,主船2具有主推进器和侧推进器(或方位推进器)作为推进器,但在本实施方式的现状显示部98中,仅显示了与在离靠岸船舶操纵中工作的侧推进器相关的主船推进器图形70。在现状显示部98中,也可以显示表示主推进器的主船推进器图形70。
76.主船推进器图形70以能够直观地掌握主船2的推进器的现状的方式显示于现状显示部98。在主船2的推进器为侧推进器的情况下,与主船2相对的侧推进器的螺旋桨的轴角度、即以主船2为基准的推进方向是恒定的。在主船2的推进器为方位推进器的情况下,与主船2相对的方位推进器的螺旋桨的轴角度可变,以主船2为基准的推进方向发生变化。因此,在本实施方式中,为了使主船2的推进器的以主船2为基准的推进方向清楚,与主船2相对的
推进器的螺旋桨的旋转面的面内方向和与主船图形2s相对的主船推进器图形70的长边方向是对应的。
77.在现状显示部98中,关于拖船3的各个推进器68,在拖船图形3s上配置有示出由推进器68产生的推进力的方向的拖船推进器信息68s。在配置于拖船图形3s上的拖船推进器信息68s中,除了在现状显示部98上以与拖船图形3s视觉重叠的方式配置的拖船推进器信息68s以外,还可以包含在海图图像60上接近拖船图形3s而配置成与搭载于拖船3的拖船推进器68的对应在视觉上清楚的拖船推进器信息68s。
78.现状显示部98上的拖船图形3s和拖船推进器信息68s的相对位置关系与拖船3和搭载在其上的推进器68的相对位置关系是对应的。如图2所示,在搭载于拖船3的推进器68为方位推进器的情况下,在方位推进器中产生的推进力的方向与螺旋桨轴向大致平行。在这样的情况下,能够根据螺旋桨轴向的信息得到由推进器68产生的推进力的方向。另外,在搭载于拖船3的推进器68为螺旋桨的情况下,根据与螺旋桨一起搭载的舵的方向来决定在螺旋桨上产生的推进力的方向。在这样的情况下,能够根据舵的方向的信息得到由推进器68产生的推进力的方向。
79.在图6中,基于螺旋桨轴向的信息,将示意性地示出螺旋桨的图形作为拖船推进器信息68s重叠地显示在拖船图形3s上。该拖船推进器信息68s是模仿俯视时的螺旋桨的旋转面的线段,与该线段垂直的方向表示螺旋桨轴向(即,由推进器68产生的推进力的方向)。本实施方式的各拖船3搭载有2台推进器68,对各推进器68显示拖船推进器信息68s。这样,以能够直观地掌握拖船3的推进器68的现状(特别是推进器68的数量(或者运转状况)、以拖船3为基准的各推进器68的推进力的产生方向)的方式将拖船推进器信息68s显示于现状显示部98。看到了该现状显示部98的当事人能够基于由各拖船推进器信息68s在画面上示出的各推进器68的推进力的产生方向,推测作用于拖船3的推力的方向。
80.在现状显示部98中,基于离靠岸距离运算模块求出的主船2与岸壁的距离,将表示主船2与岸壁61的距离64的数值和箭头重叠地显示在海图图像60上。这样,由于主船2与岸壁61的距离64用数值明确表示,所以主船船长、引水员能够考虑该距离64来进行船舶操纵。
81.在现状显示部98中,基于主船2的对地航向和对地速度,显示有表示主船2的行进方向和速度的速度矢量69。速度矢量69是以主船图形2s的船首为起点、朝向行进方向且具有与速度对应的长度的箭头。主船2的速度也可以包括在船舶的发动机停止之后通过惯性而向采用了舵的方向继续移动时的速度(惰性速度)。另外,除了速度矢量69以外,主船2的船速也可以用数值显示。
82.在现状显示部98上显示有指示用拖船线连接拖船3和主船2的连接指示文本73a。连接指示文本73a例如基于主船2和拖船3的连接位置信息,在主船2和拖船3处于连接位置的定时显示。同样,在现状显示部98上显示有指示解除拖船线的连接的连接解除指示文本73b(参照图7)。连接解除指示文本73b例如基于主船2和拖船3的连接解除位置信息,在主船2和拖船3处于连接解除位置的定时显示。连接位置信息和连接解除位置信息可以从推荐航路导出,也可以包含在推荐航路的设定信息中,还可以由信息处理装置40的操作员操作信息处理装置40而在任意的定时显示连接指示文本73a和连接解除指示文本73b。
83.在船舶操纵支持画面s上显示有示出在无线收发器中利用的vhf频道的信息的频道指示文本71。
84.在船舶操纵支持画面s上设置有通话按钮72。当选择通话按钮72时,计算机21受理通话开始的操作输入而使语音通话模块启动。信息终端20的操作员能够与信息处理装置40和其他信息终端20进行语音通话。同样,信息处理装置40的操作员能够与多个信息终端20中的任意一个或多个组合进行语音通话。另外,在信息处理装置40和多个信息终端20中搭载有通话用照相机的情况下,能够进行视频通话。
85.在现状显示部98中,主船2的船速、舵的方向以及推力的信息能够选择显示/不显示。同样,在现状显示部98中,拖船3的船速和推力的信息能够选择显示/不显示。在船舶操纵支持画面s中设置有显示了多个切换按钮的显示项目切换部99。在显示项目切换部99中,能够切换现状显示部98所示的项目的显示/不显示。当从显示项目切换部99的多个切换按钮中选择现状按钮时,显示有对主船2的船速、舵的方向及推力的信息的显示/不显示进行切换的按钮以及对拖船3的船速和推力的信息的显示/不显示进行切换的按钮。这样,在现状显示部98中,能够减少所显示的信息,切出期望的信息来显示。
86.在图7所示的船舶操纵支持画面s的现状显示部98a中,显示有与主船2的船速相关的信息和与拖船3的船速相关的信息,不显示主船2的舵的方向、主船2和拖船3的推力的信息。
87.在现状显示部98a中,基于主船2的对地航向和对地速度,显示有示出主船2的船速的速度矢量69。此外,在现状显示部98a中,基于拖船3的对地航向和对地速度,显示有示出拖船3的船速的拖船船速矢量96。拖船船速矢量96是以拖船图形3s的船首为起点、朝向拖船3的对地航向并具有与拖船3的对地速度对应的长度的箭头。但是,除了拖船船速矢量96之外,拖船3的船速也可以用数值表示。
88.在图8所示的船舶操纵支持画面s的现状显示部98b中,显示有与主船2的推力相关的信息和与拖船3的推力相关的信息,不显示主船2的舵的方向、主船2以及拖船3的船速的信息。
89.在现状显示部98b中,基于由推力运算模块求出的主船2和拖船3的推力,显示有示出作用于主船2的推力的方向和大小的主船推力矢量65a以及示出作用于拖船3的推力的方向和大小的拖船推力矢量66a。现状显示部98b也可以显示主船合成推力75。主船推力矢量65a是以主船2的推进器的位置为起点、朝向并行推力的方向并具有与并行推力的大小对应的长度的实线的箭头(有向线段)。拖船推力矢量66a是以拖船3的推进器的位置为起点、朝向并行推力的产生方向并具有与并行推力的大小对应的长度的实线的箭头。
90.此外,在现状显示部98b中,也可以显示有示出对主船2的推力指令的方向和大小的主船推力指令矢量65b以及示出对拖船3的推力指令的方向和大小的拖船推力指令矢量66b。
91.主船推力指令矢量65b是以推力的作用点86(推压点或拖拽点)为起点、朝向推力的方向并具有与推力对应的长度的点划线的箭头。拖船推力指令矢量66b是以拖船3的推进器的位置为起点、朝向推力的产生方向并具有与推力的大小对应的长度的点划线的箭头。
92.在主船推力指令矢量65b和拖船推力指令矢量66b的附近,用文本显示指令的内容。例如,指令的内容用附加了单位“n”“ps”的绝对值显示。例如,指令的内容用相对于额定输出的百分比显示。例如,指令的内容用“慢前进”、“全速前进”等以往的拖船的指挥用语来显示。
93.在上述现状显示部98b中,主船推力矢量65a和主船推力指令矢量65b重叠地显示。另外,拖船推力矢量66a和拖船推力指令矢量66b重叠地显示。由此,能够对当前产生的推力(即输出值)与根据指令而产生的推力(即指示值)进行比较。另外,观看现状显示部98b的当事人能够直观地识别以后的推力的变化。由此,能够防止当事人的指令的误认,并且,能够在当事人之间共享对指令的识别。
94.针对主船2的推力指令的方向和大小以及作用于拖船3的推力的方向和大小从由主船船长(或引水员)操作的信息终端20或信息处理装置40输入。换言之,在主船船长(或引水员)所操作的信息终端20或信息处理装置40中,允许输入与推力相关的指令。
95.图9a是示出在主船2中设定的推压点36的图,图9b是示出在主船2中设定的拖拽点37的图。如图9a所示在拖船3推压主船2时供拖船3接触的主船2上的推压点36和如图9b所示在拖船3拖拽主船2时连接有拖船线的主船2上的拖拽点37是按照每个船舶而预先确定的。拖船3的推压拖拽指令由推压点36或拖拽点37的船体相对位置以及应该对该处施加的推力的大小及方向构成。为了使指令的输入变得容易,推压点36或拖拽点37的位置的指令可以构成为从在信息处理装置40的显示器441上显示的推压点36和拖拽点37中选择。另外,应该施加的推力的大小和方向的指令由输入装置43受理,构成为在显示器441上用矢量、数值进行显示。
96.在船舶操纵支持画面s的现状显示部98中能够显示与船舶操纵指示相关的信息。图10是示出显示有与船舶操纵指示相关的信息的船舶操纵支持画面s3的图。船舶操纵支持画面s3是通过信息处理装置40的计算机41的处理器411执行显示程序7而显示在显示器441上的。在船舶操纵支持画面s3的显示项目切换部99中,能够选择与显示于现状显示部98的船舶操纵指示相关的信息的显示/不显示。与船舶操纵指示相关的信息例如是与各拖船相关的推力、推压位置、拖拽位置以及路径。在图10所例示的船舶操纵支持画面s3的现状显示部98中,在海图图像60上显示有示出主船2的位置和方位的主船图形2s以及示出拖船3的位置和方位的拖船图形3s,还显示有与船舶操纵指示相关的信息。
97.在船舶操纵支持画面s3中显示有多个拖船图形3s的情况下,为了使拖船图形3s与推力指令矢量87的组合清楚而关联起来进行显示。作为关联起来的方法,例示了将拖船图形3s和与其对应的推力指令矢量87的组合用颜色进行区分,在推力指令矢量87上附加示出了拖船3的船名的标签,用虚线连结推力指令矢量87的起点(作用点86)和拖船图形3s等。在指挥者(引水员或主船船长)所操作的终端中,在船舶操纵支持画面s3中允许输入推力的指示,能够将拖船3对主船2施加的推力作为推力指令矢量87来输入。
98.在船舶操纵支持画面s的现状显示部98中能够显示远程照相机34的拍摄图像82。返回到图6,当从设置于船舶操纵支持画面s的显示项目切换部99的多个切换按钮中选择了监视器按钮时,计算机21显示出包含显示项目切换部99的船舶操纵支持画面s2,其中,该显示项目切换部99设置有选择监视器的按钮。
99.图11是示出设置有选择监视器的按钮的船舶操纵支持画面s2的图。在船舶操纵支持画面s2的显示项目切换部99中,显示有对显示于现状显示部98的拍摄图像82进行切换的按钮。在图11所例示的船舶操纵支持画面s2的显示项目切换部99中,拖船1、拖船2以及拖船3的各拖船3的监视器是接通的。而且,在船舶操纵支持画面s2的现状显示部98中,除了海图图像60、主船图形2s、拖船图形3s以外,还以能够一览显示多个拍摄图像82(影像)的方式排
列显示。
100.对各拍摄图像82标注“tag1”“tag2”“tag3”的标签。标签表示搭载有拍摄了该图像的远程照相机34的拖船3的识别信息。在本例中,远程照相机34在各拖船3的船首朝前设置,并且显示有从各拖船3观察前方的拍摄图像82。该拍摄图像82是利用配置在位于拖船3的中央的立柱39上的远程照相机34以从拖船3的上空瞭望前方的方式拍摄而得的。根据这样显示了拍摄图像82的现状显示部98,明确了如下情形:带有“tag1”标签的拖船3对由拖船线连接的主船2的船首进行拖拽,带有“tag2”标签的拖船3对主船2的前方侧部进行推压,带有“tag3”标签的拖船3对主船2的后方侧部进行推压。由此,看到船舶操纵支持画面s2的引水员、主船船长能够大致实时地掌握从拖船3的上空瞭望前方的状况,能够在不用往来于桥部的情况下推测拖船操纵者的状况,能够向拖船操纵者发出指示。
101.如上所述,多个拍摄图像82是由搭载于拖船3的远程照相机34拍摄的图像,但也可以包含配置于主船2、岸壁的远程照相机34的拍摄图像82。
102.在船舶操纵支持画面s的现状显示部98中能够显示航路计划。返回图6,当从设置于显示项目切换部99的切换按钮中选择航路计划按钮时,计算机21使显示器241显示设置有对航路计划的显示/不显示进行切换的按钮的船舶操纵支持画面s4。
103.图12是示出设置有对航路计划的显示/不显示进行切换的按钮的船舶操纵支持画面s4的图。在船舶操纵支持画面s4的显示项目切换部99中设置有对现状显示部98切换航路计划的显示/不显示的按钮。
104.在图12所例示的船舶操纵支持画面s4的现状显示部98中,基于主船2的对地航向和对地速度,显示有示出主船2的船速的速度矢量69。此外,在船舶操纵支持画面s4中,基于拖船3的对地航向以及对地速度,显示有示出拖船3的船速的拖船船速矢量96。
105.在船舶操纵支持画面s4的现状显示部98中,基于由航路计划模块设定的推荐航路,主船2的推荐航路84与海图图像60重叠地显示。在本例中,推荐航路84被表示为从当前的主船图形2s的位置到目标靠岸位置为止连续的点划线。在推荐航路84上显示有多个唤醒点97。在本例中,唤醒点97由船型和圆圈数字表示。
106.在船舶操纵支持画面s4的现状显示部98中设置有放大/缩小的倍率变更按钮83。当通过倍率变更按钮83选择了放大时,计算机41受理船舶操纵支持画面s4的显示倍率的变更指令,使显示器241显示局部地放大了船舶操纵支持画面s4的船舶操纵支持画面s5。但是,当主船2靠近唤醒点97时,也可以自动地变更画面的倍率以显示该唤醒点97的详细情况。看到这样的船舶操纵支持画面s4、s5的当事人能够掌握主船2从入港到靠岸为止的整个航路,并且能够掌握各唤醒点97处的主船2与拖船3的关系。另外,虽然没有特别说明,但船舶操纵支持画面s的至少现状显示部98能够整体或局部地任意进行显示的放大缩小。
107.图13是示出显示有航路计划的船舶操纵支持画面s5的图。在船舶操纵支持画面s5的现状显示部98中示出了多个唤醒点97中的第3唤醒点(圆3)、第4唤醒点(圆4)以及第5唤醒点(圆5)。第5唤醒点(圆5)与目标靠岸位置对应。在各唤醒点97处显示有主船图形2s,在该主船图形2s上重叠地显示有速度矢量69和舵图形67。并且,在第4唤醒点(圆4)和第5唤醒点(圆5)中,显示有示出支持主船2的拖船3的拖船图形3s。
108.从第1唤醒点(圆1)到第3唤醒点(圆3),主船2在不接受拖船3的支持的情况下航行。在此期间,主船2从自身的推进器得到推进力,在从第1唤醒点(圆1)到第3唤醒点(圆3)
的适当位置(例如,进入港湾的地方)停止推进器。在主船2的推进器运转的期间,为了避免主船2与拖船3的接触,需要使拖船3从主船2离开。因此,信息处理装置40和信息终端20能够在显示器241、441上显示针对有可能与主船2接触的拖船3的退避指示。
109.图14是示出显示有退避指示的船舶操纵支持画面s6的图。在船舶操纵支持画面s6的现状显示部98中显示有主船图形2s、拖船图形3s以及禁止进入区域93。禁止进入区域93是预先设定的。禁止进入区域93既可以设定为绝对坐标,也可以设定为以主船2为基准的相对坐标。在图14所示的例子中,禁止进入区域93是包围主船图形2s的矩形形状的区域,但禁止进入区域93可以是任意形状。另外,禁止进入区域93构成为能够在信息处理装置40的显示器441上设定其范围。
110.在船舶操纵支持画面s6的现状显示部98中,对存在于禁止进入区域93内的拖船3显示警告。在图14所示的例子中,存在于禁止进入区域93内的拖船3用与存在于禁止进入区域93外的拖船3不同的颜色显示,并闪烁显示,此外还显示有“需要退避”的文本弹窗。这样,在船舶操纵支持画面s6上清楚地示出应从禁止进入区域93退避的拖船3。
111.当事人能够操作信息处理装置40和各信息终端20而任意地将示出退避指示的船舶操纵支持画面s6显示于显示器241(和/或显示器441)。另外,信息处理装置40能够在航路中的设定有禁止进入区域93的部分中监视主船2和各拖船3的位置,在拖船3进入到禁止进入区域93时,使信息处理装置40和各信息终端20强制性地显示示出退避指示的船舶操纵支持画面s6。
112.返回图13,在第4唤醒点(圆4)中,tag1的拖船3移动到推压主船2的位置,tag2的拖船3移动到拖拽主船2的位置并用拖船线连接。信息处理装置40和信息终端20能够使显示器241、441显示示出拖船3接近主船2时的拖船3的航路的船舶操纵支持画面s7。
113.图15是示出1艘拖船3接近主船2时的表示拖船3的航路的船舶操纵支持画面s7的图。在船舶操纵支持画面s7的现状显示部98上显示有表示主船2的位置和方位的主船图形2s以及表示拖船3的位置和方位的拖船图形3s。在船舶操纵支持画面s7的现状显示部98中,示出了拖船3接近主船2时的到达点90和至少1个唤醒点89。通过利用适当的补充函数对唤醒点89彼此之间、唤醒点89与到达点90之间进行补充,能够计划从拖船图形3s通过唤醒点89到达到达点90的接近航路88。在船舶操纵支持画面s7中,接近航路88用点划线表示。拖船操作人员能够看着船舶操纵支持画面s7并以拖船3沿着接近航路88航行的方式操纵拖船3。
114.在船舶操纵支持画面s7的现状显示部98中,在接近航路88上重叠地显示有拖船3的实际航路88’。接近航路88和实际航路88’用不同的方式显示。在本例中,接近航路88用点划线表示,实际航路88’用实线表示。通过对接近航路88和实际航路88’进行比较,其差异变得清楚。
115.图16是示出多艘拖船3接近主船2时的表示拖船3的航路的船舶操纵支持画面s8的图。即使接近主船2的拖船3的数量增加,如上所述,也与各拖船3对应地显示接近航路88。但是,在一个接近航路88与其他接近航路88交叉、或者接近航路88彼此超出规定的阈值接近的情况下,在船舶操纵支持画面s8中显示注意唤起区域92,并且显示“注意接触”的文本弹窗。
116.船舶操纵支持画面s7、s8通过由信息终端20的处理器211执行显示程序7而显示于显示器241。另外,信息处理装置40监视主船2与各拖船3的位置,在拖船3即将向主船2开始
接近之前,能够使信息处理装置40和各信息终端20强制性地显示船舶操纵支持画面s7、s8。
117.返回图13,从第4唤醒点(圆4)到第5唤醒点(圆5),主船2接受拖船3的支持而沿着推荐航路在湾内航行。在第5唤醒点(圆5)处,主船2与tag2的拖船3的连接被解除,主船2仅从tag1的拖船3接受支持。另外,在船舶操纵支持画面s6、s7、s8中,在利用拖船3推压拉拽主船2时,也可以将拖船3向主船2施加的推力显示为推力矢量。
118.如以上说明的那样,本实施方式的船舶操纵支持系统1是主船2一边由至少1艘拖船3支持一边相对于岸壁离岸或靠岸时的船舶操纵支持系统1,其具有:存储装置(存储器212、412、存储装置25、45),其存储有包含岸壁的海图图像60、主船图形2s以及拖船图形3s;至少1个检测装置(航海仪器32),其检测主船2的位置和方位以及拖船3的位置和方位;至少1个显示器(241、441);以及处理器(211、411),其使显示器(241、441)显示船舶操纵支持画面s。处理器(211、411)通过执行显示程序7,基于船舶操纵状况数据使显示器(241、441)显示船舶操纵支持画面s。
119.船舶操纵支持画面s包含:海图图像60,其包含存储于存储装置的岸壁61;主船图形2s,其基于检测装置所检测出的主船2的位置和方位而配置在海图图像60上;拖船图形3s,其基于检测装置所检测出的拖船3的位置和方位而配置在海图图像60上;以及拖船推进器信息68s,其配置在拖船图形3s上,并对搭载于拖船3的多个拖船推进器68中的各个拖船推进器68示出由该拖船推进器68产生的推进力的方向。该拖船推进器信息68s以拖船推进器68相对于拖船3的相对位置与拖船推进器信息68s相对于拖船图形3s的相对位置对应的方式配置在船舶操纵支持画面s上。
120.另外,本实施方式的船舶操纵支持方法包含如下步骤:在主船2一边由至少1艘拖船3支持一边相对于岸壁离岸或靠岸时,对主船2和拖船3的船舶操纵进行支持的信息终端(20、40)的处理器(211、411)使至少1个显示器(241、441)显示船舶操纵支持画面s。船舶操纵支持画面s包含:海图图像60,其包含岸壁;主船图形2s,其基于主船2的位置和方位而配置在海图图像60上;拖船图形3s,其基于拖船3的位置和方位而配置在海图图像60上;以及拖船推进器信息68s,其配置在拖船图形3s上,并对搭载于拖船3的多个拖船推进器68中的各个拖船推进器68示出由该拖船推进器68产生的推进力的方向。这里,拖船推进器信息68s以拖船推进器68相对于拖船3的相对位置与拖船推进器信息68s相对于拖船图形3s的相对位置对应的方式配置在现状显示部98上。
121.根据上述船舶操纵支持系统1及方法,在通过在显示器241、441所显示的海图图像60上示出的主船图形2s和拖船图形3s来示出主船2和拖船3的位置关系之后,通过拖船推进器信息68s来示出搭载于拖船3的各个推进器的现状(例如,推进器的运转状况和推进力的产生方向)。这样,在显示器241、441所显示的一个画面中一并图示了示出主船2和拖船3的位置关系的信息以及示出拖船3的各个推进器的现状的信息,因此,看到该画面的当事人能够直观地掌握它们的相互关系。搭载于拖船3的各个推进器的现状在推测作用于拖船3的推力方面是重要的信息,通过当事人能够直观地掌握该信息,能够更顺利且高效地进行离靠岸船舶操纵。
122.另外,在本实施方式的船舶操纵支持系统1中,船舶操纵支持画面s包含主船舵图形67,该主船舵图形67配置在主船图形2s上,并示出搭载于主船2的舵的舵角。
123.这样,通过在船舶操纵支持画面s上除了上述要素之外还示出舵图形67,看到该画
面的当事人能够直观地掌握主船2的舵的方向。
124.另外,在本实施方式的船舶操纵支持系统1中,船舶操纵支持画面s还包含速度矢量69,该速度矢量69配置在海图图像60上,并示出主船2的行进方向和速度。
125.通过这样图示速度矢量69,当事人能够直观地掌握主船2的行进方向和速度。速度是用于决定应该从拖船3向主船2施加的推力的重要的信息,通过当事人直观且容易地掌握该信息,能够更顺利且高效地进行离靠岸船舶操纵。
126.另外,在本实施方式的船舶操纵支持系统1中,船舶操纵支持画面s还包含:主船推力矢量65a(和/或主船推力指令矢量65b),其示出作用于主船2的推力的方向和大小;以及拖船推力矢量66a(和/或拖船推力指令矢量66b),其示出作用于拖船3的推力的方向和大小。
127.这样,通过将作用于主船2的推力和作用于拖船3的推力一并显示在一个画面中,当事人能够全面掌握在系统中工作的推力。
128.另外,在本实施方式的船舶操纵支持系统1中,船舶操纵支持画面s还包含岸壁类别图形62,该岸壁类别图形62示出岸壁61的种类。
129.岸壁61的种类难以从海图中直观地掌握,但作为岸壁类别图形62,图示了岸壁61的种类,因此当事人能够直观地掌握岸壁61的种类。
130.另外,在本实施方式的船舶操纵支持系统1中,船舶操纵支持画面s还包含连接指示文本73a,该连接指示文本73a在主船2与拖船3处于连接位置时出现,并指示用拖船线连接拖船3和主船2。另外,在本实施方式的船舶操纵支持系统1中,船舶操纵支持画面s还包含连接解除指示文本73b,该连接解除指示文本73b在主船2和拖船3处于连接解除位置时出现,并指示解除拖船线的连接。
131.由此,能够将拖船线的连接/连接解除的定时在看到显示器241、441的所有的当事人中成为共同的认识。因此,能够更顺利且高效地进行离靠岸船舶操纵。
132.另外,在本实施方式的船舶操纵支持系统1中,船舶操纵支持画面s还包含示出vhf频道的频道指示文本71。
133.通常,在离靠岸船舶操纵之前设定收发器的使用频道,但由于干扰、电波故障等,有时在作业中通信紊乱。在这样的情况下,通过提示应该从稳定的通信路径使用的频道,当事人能够顺利地切换收发器的使用频道。
134.另外,在本实施方式的船舶操纵支持系统1中,船舶操纵支持画面s(s7、s8)包含在海图图像60上重叠的拖船3接近主船2时的拖船3的计划航路(即,接近航路88)。
135.通过这样向当事人提示拖船3接近主船2时的计划航路(接近航路88),能够使拖船3的接近航路88在看到显示器241、441的所有的当事人中成为共同的认识。因此,能够更顺利且高效地进行离靠岸船舶操纵。
136.另外,在本实施方式的船舶操纵支持系统1中,船舶操纵支持画面s(s8)还包含与计划航路(即接近航路88)重叠地显示的拖船3的实际航路88’。
137.这样,通过在一个画面中显示拖船3的计划航路88和实际航路88’,能够容易地掌握实际航路88’相对于计划航路88的偏差。
138.另外,在本实施方式中,拖船3是多艘,船舶操纵支持系统1还具有照相机34,该照相机34搭载于各个拖船3并拍摄拖船3的前方。并且,船舶操纵支持画面s(s2)包含由照相机
34拍摄到的至少1个拍摄图像82。
139.由此,看到了在船舶操纵支持画面s(s2)中显示的拍摄图像82的引水员、主船船长能够大致实时地掌握瞭望了拖船3的前方的状况,能够在不用于往来桥部的情况下推测拖船3的状况,并向拖船操纵者发出指示。
140.以上,对本发明的优选的实施方式进行了说明,但在不脱离本发明的思想的范围内,对上述实施方式的具体构造和/或功能的详细情况进行了变更的方案也能够包含在本发明中。
141.例如,在上述实施方式中,信息处理装置40设置在主船2或陆地上,但信息处理装置40也可以像信息终端20那样构成为由引水员或主船船长携带的便携信息终端。
142.标号说明
143.1:船舶操纵支持系统;2:主船;2s:主船图形;3:拖船;3s:拖船图形;20:信息终端;32:航海仪器(权利要求书中的检测装置的一例);34:远程照相机;37:推进器;60:海图图像;61:岸壁;62:岸壁类别图形;65a:主船推力矢量;65b:主船推力指令矢量;66a:拖船推力矢量;66b:拖船推力指令矢量;68:拖船推进器信息;69:速度矢量;70:船推进器图形;71:频道指示文本;73:连接指示文本;73a:连接指示文本;73b:连接解除指示文本;88:接近航路(计划航路);88’:实际航路;21:计算机;211:处理器;212:存储器(权利要求书中的存储装置的一例);241:显示器;25:存储装置(权利要求书中的存储装置的一例);41:计算机;411:处理器;412:存储器(权利要求书中的存储装置的一例);441:显示器;45:存储装置(权利要求书中的存储装置的一例);98:现状显示部;99:显示项目切换部;s:船舶操纵支持画面。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。