1.本发明涉及一种深孔牵引爬行装置,具体涉及一种深孔重负载牵引爬行装置和使用方法。属于深孔爬行牵引领域。
背景技术:
2.随着煤矿开采深度加大,揭露含水层数量增加和距强含水层近的煤层开采,矿井突水次数及突水量增加,以致淹井事故日趋频繁,因此受岩溶裂隙水威胁煤层的突水机理研究和防治水已成为影响煤矿安全生产极待解决的重大课题。随着监测技术在煤矿领域的不断发展应用,采用在巷道底板钻孔,并在孔内布置相应的传感器,实时连续主动监测底板破坏深度,及时预测预报岩溶裂隙水害对煤层开采的威胁;煤矿开采领域前,勘探地下煤层分布、存量、煤质特征对煤矿的决策至关重要,首先进行煤层的探测,需要在可能存在的煤层区域进行钻探打洞,孔洞完成后需对孔洞进行的不同位置安装检测传感器进行在线探测。现有方式采用多点传感器预埋镶嵌在准备放入深孔中的电/光缆上,然后把电缆拖入深孔,深孔的深度数百米到上千米不等,深孔中的电/光缆重量也会在几十到上百千克,把如此重的电/光缆拖进深孔的难度可想而知,现有专利cn201611146100.0所述,采用多节1米长的顶杆顶入一个可充气气囊的牵引头,然后把牵引头的推送预定深度后,气囊充气固定牵引头,利用安装在牵引头上的牵引滑轮和手动绞车把带有传感器的电缆拉入孔内,实际操作效果可达100m,无法满足目前深孔要求。现有已知管道爬行器,多数以检测维修管道为目的,负重能力弱,无法实现较大负重能力电缆的拖放。
技术实现要素:
3.为了解决上述问题,本发明的目的是提供一种深孔重负载牵引爬行装置和使用方法,该方法是一种煤矿井下水平深孔重负载缆式的牵引方法。本发明可以很好的解决重负载牵引爬行问题,并且可以回收后再次使用。本发明具有牵引力量大、体积小、重量轻、可回收等特点。
4.本发明的技术方案是:一种深孔重负载牵引爬行装置包括孔锚内撑机构ⅰ、爬行运动机构、变力牵引机构、动力驱动机构、电气控制板、静壳体和动壳体;所述的孔锚内撑机构ⅰ设置在静壳体的前端,变力牵引机构设置静壳体内,静壳体的后端套接有动壳体,孔锚内撑机构ⅰ、爬行运动机构和变力牵引机构均套接在动力驱动机构的动力驱动轴ⅰ上。
5.所述的爬行运动机构由一个蜗杆和多个主爬行机构、爬行基座和辅助爬行机构组成;每个主爬行机构包括蜗轮、爬行主动轮、传动带、自适应调整器、连接杆和两个同步带轮;一个同步带轮与涡轮为一体结构,另一个与爬行主动轮为一体结构,蜗轮和爬行主动轮分别设置在连接杆的两端,两个同步带轮通过传动带转动连接,自适应调整器一端与爬行主动轮轴连接,另一端固定在爬行基座上;蜗杆、蜗轮和爬行基座均设置在静壳体内,爬行主动轮设置在静壳体外部;蜗杆与每个爬行机构的蜗轮同时啮合;爬行基座通过轴套与动力驱动机构的动力驱动轴ⅰ连接;
上还固定连接有后爬行轮支架ⅱ,后爬行轮支架ⅱ上固定有与离合机构的离合器结构相同的离合器;该离合器的离合器控制模组与电气控制板上的控制器电气连接;所述的牵引杆连接的牵引电缆置于孔锚内撑机构ⅱ外;所述的后爬行轮支架ⅱ上沿轴向均匀固定有多个后爬行轮ⅱ。
15.一种深孔重负载牵引爬行装置的使用方法,具体步骤如下:1)开始阶段:开始工作前,使孔锚内撑机构ⅰ的伸缩臂缩进,变力牵引机构的滑母归位;牵引电缆初期,通过电气控制板上的控制器打开爬行运动机构离合器并启动减速机马达,动力驱动轴ⅰ驱动爬行运动机构工作,带动着深孔重负载牵引爬行装置自身和被牵引电缆在深孔洞中前行;2)内撑固定阶段:随着牵引电缆进入孔洞距离变大,需要的牵引力增大,达到一定值时进入正常牵引阶段,此时断开爬行运动机构的爬行运动机构离合器,停止爬行,打开孔锚内撑机构ⅰ的内撑机构离合器,动力驱动轴ⅰ驱动伸缩臂调整器,使其伸出伸缩臂,内撑于孔内壁,并牢固固定深孔重负载牵引爬行装置;3)牵引阶段深孔重负载牵引爬行装置通过孔锚内撑机构ⅰ固定好后,断开内撑机构离合器,打开变力牵引机构的变力牵引机构离合器,旋转丝杠,移动滑母,使被牵引电缆牵引的负载在变力牵引机构的牵引下前行;当滑母到前行限位位置后,反向旋转丝杠移动使滑母归位,此时动壳体在压力弹簧作用下复位,牵引电缆移动量通过牵引杆吸收到导向套杆内;4)爬行阶段断开变力牵引机构离合器和孔锚内撑机构ⅰ的内撑机构离合器,打开爬行运动机构的爬行运动机构离合器,使深孔重负载牵引爬行装置爬行,直至牵引杆内牵引内杆被导向杆套限位,停止爬行,然后打开内撑机构离合器,使深孔重负载牵引爬行装置前段固定于孔壁;如果需要转弯,电气控制板上的控制器向转向调整机构发出指令,使前爬行轮ⅰ旋转需要角度即可;重复上述过程,达到深孔重负载牵引爬行装置牵引力前行;退出过程仅执行反向爬行即可实现。
16.本发明的有益效果是:1)本发明的装置可以较小的体积实现较大的牵引力,可达上百千克力。
17.2)本发明的装置推送距离远,可把电缆牵引深孔内达上千米。
18.3)本发明的装置能转弯爬行,可用于有分支的孔洞牵引。
19.4)本发明的装置智能化,可安装摄像、传感器等检测装置,与外界进行双向通讯数据传输。
20.5)本发明的装置可扩展附加设备实现更多功能。
21.6)本发明的装置可用于其他的管道、深孔检测领域。
22.下面将结合具体实施例及附图对本发明做进一步详细说明。
附图说明
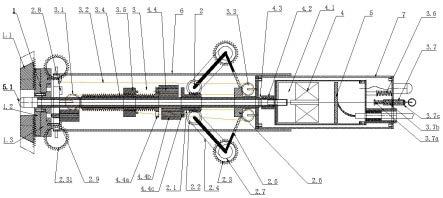
23.图1是本发明实施例1和实施例2的结构示意图。
24.图2是本发明实施例3的结构示意图。
25.附图标记说明: 1、孔锚内撑机构ⅰ;1.1、伸缩臂;1.2、伸缩臂调整器;1.3、内撑底座;2、爬行运动机构;2.1、蜗杆;2.2、蜗轮;2.3、主动爬行轮;2.31、前爬行轮ⅰ;2.32、后爬行轮ⅱ;2.4、同步带;2.5、自适应调整器;2.6、爬行基座; 2.7、同步带轮;2.8、转向调整机构;2.9、前爬行轮支架ⅰ;2.91、后爬行轮支架ⅱ;3、 变力牵引机构;3.1、定滑轮;3.2、牵引丝绳;3.3、动滑轮;3.4、丝杠;3.5、滑母;3.6、压力弹簧;3.7、牵引杆;3.7a、牵引内杆; 3.7b、牵引弹簧;3.7c、导向杆套;4、动力驱动机构;4.1、减速机马达;4.2、联轴器ⅰ;4.21、联轴器ⅱ;4.3、动力驱动轴ⅰ;4.31、动力驱动轴ⅱ;4.4、离合机构;4.4a、从动法兰;4.4b、离合控制模组;4.4c、伸缩销钉;5、电气控制板;5.1、摄像头及照明灯;6、静壳体;7、动壳体;8、孔锚内撑机构ⅱ。
具体实施方式
26.实施例1如图1所示,一种深孔重负载牵引爬行装置,包括孔锚内撑机构ⅰ1、爬行运动机构2、变力牵引机构3、动力驱动机构4、电气控制板5、静壳体6和动壳体7;所述的孔锚内撑机构ⅰ1设置在静壳体6的前端,变力牵引机构3设置静壳体6内,静壳体6的后端套接有动壳体7,动力驱动机构4和电气控制板5均设置在动壳体7内;动力驱动机构4的动力驱动轴ⅰ4.3穿过动壳体7伸入静壳体6内,孔锚内撑机构ⅰ1、爬行运动机构2和变力牵引机构3均套接在动力驱动机构4的动力驱动轴ⅰ4.3上;所述的爬行运动机构2由一个蜗杆2.1和多个主爬行机构、爬行基座2.6和辅助爬行机构组成;每个主爬行机构包括蜗轮2.2、爬行主动轮2.3、传动带2.4、自适应调整器2.5、连接杆和两个同步带轮2.7;一个同步带轮2.7与涡轮2.2为一体结构,另一个与爬行主动轮2.3为一体结构,蜗轮2.2和爬行主动轮2.3分别设置在连接杆的两端,两个同步带轮2.7通过传动带2.4转动连接,自适应调整器2.5一端与爬行主动轮2.3轴连接,另一端固定在爬行基座2.6上;蜗杆2.1、蜗轮2.2和爬行基座2.6均设置在静壳体6内,爬行主动轮2.3设置在静壳体6外部;蜗杆2.1与每个爬行机构的蜗轮2.2同时啮合,为爬行运动机构提供驱动输入;爬行基座2.6通过轴套与动力驱动机构4的动力驱动轴ⅰ4.3连接;所述的辅助爬行机构包括多个前爬行轮ⅰ2.31、转向调整机构2.8和前爬行轮支架ⅰ2.9,前爬行轮支架ⅰ2.9固定连接在静壳体6前端内部,转向调整机构2.8设置在前爬行轮支架ⅰ2.9上,多个前爬行轮ⅰ2.31沿轴向均匀固定在前爬行轮支架ⅰ2.9上,并位于静壳体6外。辅助爬行机构在装置运动过程中起辅助支撑和转向作用,并保证装置的正常爬行。
27.进一步,主爬行机构为4个,前爬行轮ⅰ2.31至少为3个。
28.数个蜗轮和爬行主动轮由一个蜗杆同时驱动,并均布于蜗杆周围,每个蜗轮驱动对应爬行主动轮,爬行主动轮与蜗轮之间不仅限于同步带轮传输,也可以采用齿轮传输;蜗杆和蜗轮的驱动方式,也可以采用伞形齿轮方式实现。
29.本装置在拖动电缆需要牵引力较小时,仅爬行运动机构通过其动力驱动机构驱动爬行,牵引着装置自身和被牵引电缆在孔洞中前行,此时,孔锚内撑机构的伸缩臂缩进,变
力牵引机构的滑母归位;当拖动电缆需要牵引力较大时,停止爬行运动机构爬行,打开孔锚内撑机构使伸缩臂伸出,牢固固定装置;固定好后,断开孔锚内撑机构,打开变力牵引机构使被牵引电缆拉动下前行;当到一定牵引位置后,打开爬行运动机构,使装置爬行,而后重复上述过程,达到装置的不断牵引前行。
30.实施例2在实施例1的基础上,如图1所示,所述的孔锚内撑机构ⅰ1由伸缩臂1.1、伸缩臂调整器1.2和内撑基座1.3组成,伸缩臂1.1通过伸缩臂调整器1.2固定在内撑基座1.3上;内撑基座1.3套接在动力驱动轴ⅰ4.3上,孔锚内撑机构ⅰ1并通过螺钉固定连接在前爬行轮支架ⅰ2.9上;伸缩臂调整器1.2通过外部旋转力矩调整伸缩臂1.1的伸缩,以达到孔锚内撑机构ⅰ1与外部深孔壁之间的顶紧或释放。孔锚内撑机构ⅰ1提供牵引过程中的动态固定支点,以保证实现较大牵引力所需的固定支点。
31.进一步,伸缩臂1.1至少为3个,伸缩臂1.1设置有齿牙和导向凸台,内撑基座1.3为圆形基座,其上设置有导向沟槽,每个伸缩臂1.1的齿牙和导向凸台可与圆形基座的导向沟槽配合在径向滑动,伸缩臂调节器正反方向旋转带动伸缩臂的齿牙移动使伸缩臂伸出或缩进。
32.进一步,所述的自适应调整器2.5为两端铰链带压缩弹簧的伸缩杆。该自适应调整器长度可根据孔洞直径自动调整,保证爬行主动轮与孔洞内壁有足够的压力和运动过程中的摩擦动力;弹性的伸缩杆可由压缩弹簧、电控的伸缩臂,或安装在爬行主动轮旋转轴上的角度弹簧等其他等效的方式。
[0033] 进一步,所述的动力驱动机构4由减速机马达4.1、联轴器ⅰ4.2、动力驱动轴ⅰ4.3和离合机构4.4组成;减速机马达4.1通过联轴器ⅰ4.2与动力驱动轴ⅰ4.3转动连接;离合机构4.4由三组结构相同的离合器构成,具体分为内撑机构离合器、爬行运动机构离合器和变力牵引机构离合器,离合器包括从动法兰4.4a、离合控制模组4.4b和伸缩销钉4.4c;伸缩销钉4.4c设置在离合控制模组4.4b中,并受其控制伸出或缩进;离合控制模组4.4b与动力驱动轴ⅰ4.3紧固连接,从动法兰4.4a通过轴承或轴套与动力驱动轴ⅰ4.3连接;变力牵引机构离合器和爬行运动机构离合器设置在变力牵引机构3的丝杠3.4和爬行运动机构的蜗杆2.1之间的动力驱动轴ⅰ4.3上,并分别通过从动法兰4.4a与蜗杆2.1及丝杠3.4固定连接;内撑机构离合器设置在动力驱动轴ⅰ4.3前端,通过从动法兰4.4a 与孔锚内撑机构ⅰ1固定连接;离合机构中的三个离合控分时与驱动马达协调工作以达到装置爬行、装置固定和电缆牵引过程。
[0034]
减速机马达4.1、每个离合器控制模组4.4b、转向调整机构2.8均与电气控制板5上的控制器电气连接,控制器控制减速机马达4.1启停和正反转,每个离合器控制模组4.4b接受控制器的控制指令,使对应的离合器伸缩销钉4.4c从对应离合器控制模组4.4b中伸出或缩进,从而使离合机构4.4的从动法兰4.4a与离合器控制模组4.4b是否同步旋转运动,达到动力驱动轴ⅰ4.3动力的输出。
[0035]
优选地,减速机马达为低转速、大扭矩马达。
[0036]
进一步,所述的变力牵引机构3变力牵引机构采用动滑轮组原理实现牵引力变力,变力牵引机构3包括滑轮组、丝杠3.4和滑母3.5;所述滑轮组包括定滑轮3.1、动滑轮3.3和牵引丝绳3.2,定滑轮3.1和牵引丝绳3.2的一端固定在前爬行轮支架ⅰ2.9上,动滑轮3.3固
定在动壳体7与静壳体6套接一端的端面上,丝杠3.4套接在前爬行轮支架ⅰ2.9一侧的动力驱动轴ⅰ4.3上,滑母3.5套接在丝杠3.4上,牵引丝绳3.2另一端依次通过动滑轮3.3和定滑轮3.1固定在滑母3.5上,所述的动滑轮3.3为一个或多个。与滑母啮合的丝杠为变力牵引机构的驱动输入。
[0037]
进一步,所述的丝杠3.4驱动滑母3.5牵引丝绳3.2的方式,也可以采用涡杆驱动涡轮,涡轮带动丝绳缠绕轮方式实现。
[0038]
本实施例的变力牵引机构采用滑轮组省力原理,借助于孔锚内撑机构的固定支点以较小拉力实现较大牵引力,但不局限于此,所述的变力牵引机3还可以为杠杆牵引机构或液压牵引机构,或者其它等省力结构原理实现。
[0039]
进一步,所述的变力牵引机构3还包括设置在动壳体7上的压力弹簧3.6和牵引杆3.7;动力驱动机构4的减速机马达4.1和电气控制板5外部设置有壳体,压力弹簧3.6位于壳体与动壳体7内端面之间;压力弹簧可以保证装置牵引过程中滑母运动和归位时滑轮组的牵引丝绳始终处于张紧状态。
[0040]
进一步,所述的牵引杆3.7为一端固定连接有牵引电缆的弹性伸缩杆,所述的弹性伸缩杆包括牵引内杆3.7a、牵引弹簧3.7b和导向杆套3.7c,牵引内杆3.7a上套有牵引弹簧3.7b,并装在导向杆套3.7c内,导向杆套3.7c固定在动壳体7后端面上。
[0041]
牵引杆3.7可以当变力牵引机构归位时吸收被牵引电缆前行的部分长度,牵引杆两端被导向壳体限位,装置爬行移动时,牵引杆压缩弹簧到末端限位,然后变力牵引机构牵引使电缆移动,当牵引机构归位时,压缩弹簧释放,使电缆前移的部分收回到导向壳体内。
[0042]
本实施例中的孔锚内撑机构ⅰ1、爬行运动机构2和变力牵引机构3的驱动动力由一个动力驱动机构提供,作为优先考虑的方式;本发明的装置中也可以是多个动力驱动机构,分别给孔锚内撑机构ⅰ1、爬行运动机构2和变力牵引机构3提供动力。
[0043]
进一步,从动法兰在离合器伸缩销钉弹出对应半径周长上开有对应大小的一组孔。
[0044]
进一步,所述的动力驱动轴ⅰ4.3顶端和动壳体7的后端均设置有摄像头及照明灯5.1,摄像头及照明灯5.1与电气控制板5的控制器电气连接,以观察装置运动时周围的影像数据;电气控制板5上还设置有传感器、通讯及其它设备控制接口。可外扩附加控制设备,还可以把装置检测的数据通过光缆或电缆传输至孔外,或者把外面操作人员的控制指令下发给电气控制板,以执行相应的动作。
[0045]
本实施例中的控制器可以是单片机或plc.等组成的控制电路。
[0046]
一种深孔重负载牵引爬行装置的使用方法,具体步骤如下:1)开始阶段:开始工作前,使孔锚内撑机构ⅰ的伸缩臂缩进,变力牵引机构的滑母归位;牵引电缆初期,通过电气控制板上的控制器打开爬行运动机构离合器并启动减速机马达,动力驱动轴ⅰ驱动爬行运动机构工作,带动着深孔重负载牵引爬行装置自身和被牵引电缆在深孔洞中前行;2)内撑固定阶段:随着牵引电缆进入孔洞距离变大,需要的牵引力增大,达到一定值时进入正常牵引阶段,此时断开爬行运动机构的爬行运动机构离合器,停止爬行,打开孔锚内撑机构ⅰ的内撑
机构离合器,动力驱动轴ⅰ驱动伸缩臂调整器,使其伸出伸缩臂,内撑于孔内壁,并牢固固定深孔重负载牵引爬行装置;3)牵引阶段深孔重负载牵引爬行装置通过孔锚内撑机构ⅰ固定好后,断开内撑机构离合器,打开变力牵引机构的变力牵引机构离合器,旋转丝杠,移动滑母,使被牵引电缆牵引的负载在变力牵引机构的牵引下前行;当滑母到前行限位位置后,反向旋转丝杠移动使滑母归位,此时动壳体在压力弹簧作用下复位,牵引电缆移动量通过牵引杆吸收到导向套杆内;4)爬行阶段断开变力牵引机构离合器和孔锚内撑机构ⅰ的内撑机构离合器,打开爬行运动机构的爬行运动机构离合器,使深孔重负载牵引爬行装置爬行,直至牵引杆内牵引内杆被导向杆套限位,停止爬行,然后打开内撑机构离合器,使深孔重负载牵引爬行装置前段固定于孔壁;如果需要转弯,电气控制板上的控制器向转向调整机构发出指令,使前爬行轮ⅰ旋转需要角度即可;重复上述过程,达到深孔重负载牵引爬行装置牵引力前行;退出过程仅执行反向爬行即可实现。
[0047]
实施例3与实施例2不同之处是:如图2所示,所述的一种深孔重负载牵引爬行装置还包括孔锚内撑机构ⅱ8,所述的动力驱动机构4还包括动力驱动轴ⅱ4.31,所述动力驱动轴ⅱ4.31与动力驱动轴ⅰ4.3方向相反,通过联轴器ⅱ4.21设置在动壳体7外,为孔锚内撑机构ⅱ8提供动力;所述的孔锚内撑机构ⅱ8与孔锚内撑机构ⅰ1的结构相同,孔锚内撑机构ⅱ8的内撑基座1.3套接在动力驱动轴ⅱ4.31上,内撑基座1.3内侧的动力驱动轴ⅱ4.31上还固定连接有后爬行轮支架ⅱ2.91,后爬行轮支架ⅱ2.91上固定有与离合机构4.4的离合器结构相同的离合器;该离合器的离合器控制模组4.4b与电气控制板5上的控制器电气连接;所述的牵引杆3.7连接的牵引电缆置于孔锚内撑机构ⅱ8外;所述的后爬行轮支架ⅱ2.91上沿轴向均匀固定有多个后爬行轮ⅱ2.32。
[0048]
本发明的孔锚内撑机构ⅱ8也可以采用独立的动力驱动机构。
[0049]
优选地,后爬行轮ⅱ2.32为3个。
[0050]
将动壳体7的后端的摄像头及照明灯5.1设置在动力驱动轴ⅱ4.3后端。
[0051]
本实施例的深孔重负载牵引爬行装置的使用方法与实施例2基本相同,不同之处是:3)牵引阶段:深孔重负载牵引爬行装置通过孔锚内撑机构ⅰ固定好后,断开内撑机构离合器,打开变力牵引机构的变力牵引机构离合器,旋转丝杠,移动滑母,使和动壳体、孔锚内撑机构ⅱ和被牵引电缆引的负载在变力牵引机构3的牵引下前行;当滑母到前行限位位置后,断开变力牵引机构离合器,打开孔锚内撑机构ⅱ的离合器,动力驱动轴ⅱ4.3驱动孔锚内撑机构ⅱ,使牵引电缆端部固定与孔洞壁上,再打开变力牵引机构离合器,反向旋转丝杠移动使滑母归位,此时动壳体在压力弹簧作用下复位,牵引电缆移动量通过牵引杆吸收到导向套杆内。
[0052]
实施例4在实施例1或2或3的基础上,本发明的装置与被牵引电缆之间设置有脱扣器,脱扣器与电气控制板的控制器电气连接,电气控制板的控制器控制脱扣器可以使装置与被牵引电缆
之间连接或断开,可以实现装置重复使用。脱扣器属于现有技术这里不做详细说明。
[0053]
进一步,本发明的牵引杆与被牵引电缆之间设置有脱扣器。
[0054]
以上实施例没有具体描述的部分都属于本技术领域的公知部件和常用结构或常用手段,此处不再一一详细说明。
[0055]
以上例举仅仅是对本发明的举例说明,并不构成对本发明的保护范围的限制,凡是与本发明相同或相似的设计均属于本发明的保护范围之内。。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
