1.本技术涉及复合零件的制造,并且特别涉及复合零件的逐层成型的设备、 方法和系统。
背景技术:
2.成型的复合结构通常用于期望轻量和高强度的应用,例如飞机和交通工 具。通常,这些应用利用必须成型并然后固化的波状外形零件。复合结构(特 别是相对较大的复合结构或具有复杂外形的复合结构)的常规成型在固化之 前需要大量的手工劳动。举例来说,复合纤维铺层(例如,预浸渍纤维铺层 或干织物)用手铺设在成某种形状的成型工具或心轴上。然后通常通过加热 和加压使该零件固化。所得零件与成型工具的形状相匹配。然而,纤维铺层 的手动铺设既费时又费力。
3.一些已知的复合制造工艺试图使成型操作的一部分自动化。作为一个示 例,悬垂成型工艺包括加热预浸渍纤维铺层的叠层(“复合装料”)并使用 真空袋或橡胶气囊将其用力压在心轴周围。然而,这种方法在厚层压板或具 有较复杂形状的结构上取得的成功有限。作为另一个示例,压实机可用于在 制作过程中将复合装料压紧在工具表面上。然而,当工具表面和所产生的结 构为波状外形时,这种方法通常需要在压实之后进行补充手动成型。因此, 虽然此类方法在使相对较小且较薄的复合结构或具有相对简单形状的复合结 构成型这方面可能是有效的,但是当应用于使大型复合结构或具有较复杂形 状的复合结构成型时,它们可能是低效的。
4.因此,本领域技术人员继续致力于复合制造领域中的研发,并且更具体 地,继续致力于关于相对较大和/或相对较复杂的复合结构的逐层制造的研发。
技术实现要素:
5.公开了一种成型设备、方法和系统。
6.在一个示例中,所公开的成型设备包括框架。该框架限定了竖直轴线、 水平轴线和纵轴线。滑架可移动地连接到框架。脚踏可移动地连接到滑架, 使得它可以沿竖直轴线移动。第一末端执行器可移动地连接到滑架,并且第 二末端执行器可移动地连接到滑架。第一末端执行器和第二末端执行器沿纵 轴线彼此横向相对,并且脚踏位于第一末端执行器和第二末端执行器之间。
7.还公开了一种使复合零件成型的方法。
8.在一个示例中,所公开的用于使复合零件成型的方法包括在成型工具的 成型表面上施加至少一个铺层的复合材料。该方法还包括用成型设备在成型 工具的成型表面上使所述至少一个铺层的复合材料变形。成型设备包括框架。 该框架限定了竖直轴线、水平轴线和纵轴线。滑架可移动地连接到框架。脚 踏可移动地连接到滑架,使得它可以沿竖直轴线移动。第一末端执行器可移 动地连接到滑架,并且第二末端执行器可移动地连接到滑架。第一末端执行 器和第二末端执行器沿纵轴线彼此横向相对,并且脚踏位于第一末端执
行器 和第二末端执行器之间。
9.还公开了一种用于使复合零件成型的系统。
10.在一个示例中,所公开的系统包括成型设备。成型设备包括框架。该框 架限定了竖直轴线、水平轴线和纵轴线。滑架可移动地连接到框架。脚踏可 移动地连接到滑架,使得它可以沿竖直轴线移动。第一末端执行器可移动地 连接到滑架,并且第二末端执行器可移动地连接到滑架。第一末端执行器和 第二末端执行器沿纵轴线彼此横向相对,并且脚踏位于第一末端执行器和第 二末端执行器之间。该系统还包括成型工具。该系统还包括至少一个铺层的 复合材料。该系统还包括位于脚踏下方的铺层支撑特征件。
附图说明
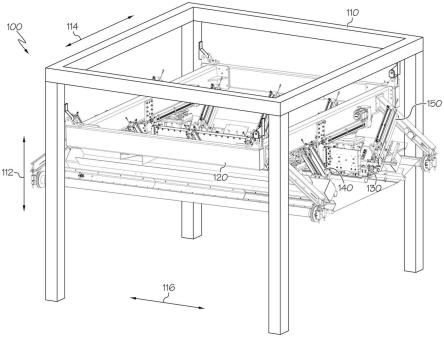
11.图1是示例性成型设备的等距视图。
12.图2是图1的示例成型设备的侧视图。
13.图3是图1的示例成型设备的侧视图。
14.图4a是图1的成型设备的轴承组件的等距视图。
15.图4b是图1的成型设备的轴承组件的等距视图。
16.图5是图1的成型设备的等距视图。
17.图6是图1的成型设备的多个末端执行器的等距视图。
18.图7是图1的成型设备的多个末端执行器的正视图。
19.图8是图1的成型设备的多个末端执行器的正视图。
20.图9a是图1的成型设备的多个成型特征件的等距视图。
21.图9b是图1的成型设备的多个成型特征件的等距视图。
22.图10a是图1的成型设备的多个成型特征件的等距视图。
23.图10b是图1的成型设备的多个成型特征件的等距视图。
24.图11是图1的成型设备的等距视图。
25.图12是图1的成型设备的等距视图。
26.图13是图1的成型设备的等距视图。
27.图14是示例性成型设备的平面图。
28.图15是图14的成型设备的脚踏的等距视图。
29.图16a是图1的成型设备的多个末端执行器的平面图。
30.图16b是图1的成型设备的多个末端执行器的平面图。
31.图16c是图1的成型设备的多个末端执行器的平面图。
32.图16d是图1的成型设备的多个末端执行器的平面图。
33.图17a是图1的成型设备的一部分的侧视图。
34.图17b是图17a的成型设备的所述部分的等距视图。
35.图18是复合制造系统的等距视图。
36.图19是用于使复合零件成型的方法的流程图。
37.图20是能够与图19的方法一起使用的系统的框图。
38.图21是制造方法的流程图。
39.图22是能够与图21的方法一起使用的系统的框图。
100还被构造成在成型工具310的成型表面308上使所述至少一个铺层320的 复合材料325变形220,同时消除任何气泡。成型设备100被构造成以不同的 速度、压力和角度沿着成型工具310移动以适应各种几何结构。
48.参考图1和图2,图示了成型设备100的示例。在示例中,成型设备100 包括框架110。在示例中,框架110的形状通常为矩形。框架110限定了竖直 轴线112、水平轴线114和纵轴线116。框架110围绕滑架120,滑架120具 有与框架110大致相同但更小的形状,使得滑架120嵌套在框架110内。在 示例中,滑架120可移动地连接到框架110,使得它可以沿竖直轴线112和水 平轴线114枢转或旋转以适应任何特定的几何结构或构造并实现最佳配合位 置。
49.在示例中,成型设备100包括第一末端执行器140。第一末端执行器140 可移动地连接到滑架120。在示例中,第一末端执行器140可经由致动器147 移动。在示例中,致动器147是气动致动的成型缸147a。第一末端执行器140 可以包括一个或多个传感器410,所述一个或多个传感器410被构造成检测成 型工具310沿着包括竖直轴线112、水平轴线114和纵轴线116在内的数个轴 线的位置,以便在复杂的成型工具310上进行精确成型。所述一个或多个传 感器410可以与控制器400通信。控制器400被构造成从所述一个或多个传 感器410接收数据并分析该数据以控制第一末端执行器140的移动。控制器 400可以结合从所述一个或多个传感器410收集的数据利用一个或多个数字控 制程序420来确定第一末端执行器140的正确移动和放置。
50.第一末端执行器140包括第一成型特征件142。在示例中,第一成型特征 件142是成型指状物148。在示例中,第一成型特征件142是可充气气囊146。 可充气气囊146被构造成通过施加一致的压实力350而被动跟随成型工具310 的外形。压实力350可以变化。在示例中,压实力350可以高达每线性英寸 20磅。可充气气囊146的轮廓或取向可以用一个或多个顶起螺钉146a操纵以 符合沿着成型工具310长度的凹形或凸形轮廓并控制可充气气囊146的半径。 图17a和图17b图示了相对于可充气气囊146的顶起螺钉146a。
51.在示例中,成型设备100包括第二末端执行器150。第二末端执行器150 可移动地连接到滑架120。在示例中,第一末端执行器140相对于纵轴线116 与第二末端执行器150横向相对。第一末端执行器140和第二末端执行器150 被构造成彼此独立地移动。在示例中,第一末端执行器140和第二末端执行 器150被构造成相对于纵轴线116独立地横向移动。
52.在示例中,第二末端执行器150可经由致动器147移动。在示例中,致 动器147是气动致动的成型缸147a。第二末端执行器150可以包括一个或多 个传感器410,所述一个或多个传感器410被构造成检测成型工具310的位置 和构造。所述一个或多个传感器410可以与控制器400通信。控制器400被 构造成接收来自所述一个或多个传感器410的数据并分析该数据以控制第二 末端执行器150的移动。控制器可以结合从所述一个或多个传感器410收集 的数据利用一个或多个数字控制程序420来确定第二末端执行器150的正确 移动和放置。第二末端执行器包括第二成型特征件152。在示例中,第二成型 特征件152是成型指状物148。在示例中,第二成型特征件152是可充气气囊 146。
53.在示例中,成型设备100包括可移动地连接到滑架120的脚踏130。脚踏 130可沿竖直轴线112移动。基于成型工具310的几何结构,脚踏130可以具 有平坦或弯曲的设计。在示例中,脚踏130位于第一末端执行器140和第二 末端执行器150之间。脚踏130被构造成经由
任何合适的方式沿竖直轴线112 移动,并且进一步被构造成将一个或多个铺层320的复合材料325压到成型 工具310的成型表面308上并将所述一个或多个铺层320的复合材料325保 持在适当位置。在示例中,脚踏130的移动由致动器147控制。在示例中, 致动器147是气动致动的成型缸147a。在示例中,脚踏130的移动由至少一 个磁性开关控制,所述至少一个磁性开关被构造成检测脚踏130相对于成型 工具310的行进和位置。脚踏130被构造成向成型工具310施加压实力350。 施加的压实力350可以是可变的,也可以是一致的,这基于成型工具310的 几何结构。
54.在示例中,成型设备100包括铺层支撑特征件185。铺层支撑特征件185 可以位于脚踏130下方。铺层支撑特征件185可以被构造成在开始成型之前 支撑一个或多个铺层320的复合材料325。铺层支撑特征件185可以进一步被 构造成防止所述一个或多个铺层320的复合材料325在成型之前或期间起皱。 铺层支撑特征件185可以是机械的或者可以是空气驱动的。在示例中,铺层 支撑特征件185是气刀。
55.在示例中,成型工具310是纵梁成型工具316。成型工具310可以定位在 一个或多个可移动成型块上。所述一个或多个可移动成型块可以被构造成沿 水平轴线114移动。第一多个145第一末端执行器140和第二多个155第二 末端执行器150彼此横向相对,其中脚踏130位于它们之间。第一多个145 第一末端执行器140和第二多个155第二末端执行器150的用于容纳纵梁成 型工具316的构造在图10a和图10b中示出。在该示例中,第一多个145第 一末端执行器140是凸形的并且第二多个155第二末端执行器150是凹形的。 图16a-16d图示了第一多个145第一末端执行器140和第二多个155第二末端 执行器150能够实现以与成型工具310的几何结构相匹配的各种凹凸构造。 第一成型特征件142和第二成型特征件152是可充气气囊146。
56.图9a和图9b分别图示了第一多个145第一末端执行器140和第二多个 155第二末端执行器150的示例。在示例中,第一多个145第一末端执行器 140和第二多个155第二末端执行器150被构造用于成型工具310,该成型工 具310是翼梁成型工具314。第一多个145第一末端执行器140的构造是凹形 的并且第二多个155第二末端执行器150的构造是凸形的。虽然在这两幅图 中均未示出,但脚踏130位于第一多个145第一末端执行器140和第二多个 155第二末端执行器150之间。第一多个145第一末端执行器140和第二多个 155第二末端执行器150中的每一个单独包括可充气气囊146以分别用于第一 成型特征件142和第二成型特征件152。
57.图14图示了包括帽形纵梁成型工具312的构造。在该示例中,成型工具 310是帽形纵梁成型工具312。帽形纵梁成型工具312的圆帽形构造要求脚踏 130的构造足够硬以传递压实力350,同时符合成型工具310的几何结构,因 此它被弯曲以匹配如图15所示的帽形纵梁成型工具312的弯曲构造。第一末 端执行器140和第二末端执行器150各自利用成型指状物148以分别用于第 一成型特征件142和第二成型特征件152。成型指状物148使得能够进入过于 狭小的半径并符合零件的几何结构(例如,斜坡和铺层急剧向下倾斜),在 高成型力或压实力350下,可充气气囊146可能无法进入这些几何结构。在 示例中,第一多个145第一成型特征件142和第二多个155第二成型特征件 152可以沿纵轴线116大体上是线性的。
58.图6和图7图示了成型设备100的第一多个145第一末端执行器140。在 示例中,成型设备100包括第一多个145第一末端执行器140。第一多个145 第一末端执行器140沿纵轴
线116延伸。在示例中,第一多个145第一末端 执行器140中的每一个单独的第一末端执行器140是可独立移动的。这种布 置允许第一多个145第一末端执行器140形成凸形、凹形或线性构造。在图7 的示例性示例中,第一多个145第一末端执行器140包括可移动地连接到安 装梁180的五个第一末端执行器140。安装梁180可移动地连接到滑架120, 使得它可以根据成型工具310的形状和几何结构沿竖直轴线112和水平轴线 114移动。
59.在图7的示例性示例中,第一末端执行器a 140a可沿水平轴线114移动 以适应凹形、凸形或线性构造。该移动可以是被动的,使得它基于第一多个 145第一末端执行器140中的一个或多个不同的第一末端执行器140的移动而 移动。第一末端执行器a 140a连接到包括可充气气囊146的第一成型特征件 142。可以使用任何合适的连接和紧固方式来将第一成型特征件142固定到第 一末端执行器a 140a。在示例中,螺钉149用于将成型特征件142定位和固 定到第一末端执行器a 140a。
60.在示例中,第一末端执行器b 140b可沿水平轴线114和竖直轴线112移 动。沿水平轴线114的移动是被动的。沿竖直轴线112的移动通过任何合适 的方式控制。在示例中,第一末端执行器b 140b的移动由致动器147控制。 在示例中,致动器147是气动致动的成型缸147a。第一末端执行器b 140b的 移动可由控制器400控制。控制器400被构造成从一个或多个传感器410接 收数据并分析该数据以控制第一末端执行器b 140b的移动。控制器400可以 结合从所述一个或多个传感器410收集的数据利用一个或多个数字控制程序 420来确定第一末端执行器b 140b的正确移动和放置,从而与成型工具310 正确地对齐。
61.在示例中,第一末端执行器c 140c可沿水平轴线114和竖直轴线112移 动。沿竖直轴线112的移动通过任何合适的方式控制。在示例中,第一末端 执行器c 140c的移动由致动器147控制。在示例中,致动器147是气动致动 的成型缸147a。第一末端执行器c 140c的移动可由控制器400控制。控制器 400被构造成从一个或多个传感器410接收数据并分析该数据以控制第一末端 执行器c 140c的移动。控制器400可以结合从所述一个或多个传感器410收 集的数据利用一个或多个数字控制程序420来确定第一末端执行器c 140c的 正确移动和放置,从而与成型工具310正确地对齐。
62.在示例中,第一末端执行器d 140d可沿竖直轴线112移动。沿水平轴线 114的移动是被动的。沿竖直轴线112的移动通过任何合适的方式控制。在示 例中,第一末端执行器d 140d的移动由致动器147控制。在示例中,致动器 147是气动致动的成型缸147a。第一末端执行器d 140d的移动可由控制器400 控制。控制器400被构造成从一个或多个传感器410接收数据并分析该数据 以控制第一末端执行器d 140d的移动。控制器400可以结合从所述一个或多 个传感器410收集的数据利用一个或多个数字控制程序420来确定第一末端 执行器d 140d的正确移动和放置,从而与成型工具310恰当地对齐。
63.在示例中,第一末端执行器e 140e可沿水平轴线114移动以适应凹形、 凸形或线性构造。该移动可以是被动的,使得它基于第一多个145第一末端 执行器140中的一个或多个不同的第一末端执行器140的移动而移动。第一 末端执行器e 140e连接到包括可充气气囊146的第一成型特征件142。可以 使用任何合适的连接和紧固方式来将第一成型特征件142固定到第一末端执 行器e 140e。
64.在示例中,成型设备100包括第二多个155第二末端执行器150。第二多 个155第二末端执行器150沿纵轴线116延伸并且与第二多个155第二末端 执行器150横向相对。在示
例中,第二多个155第二末端执行器150中的每 一个单独的第二末端执行器150是可独立移动的。这种布置允许第二多个155 第二末端执行器150形成凸形、凹形或线性构造。在图8的示例性示例中, 第二多个155第二末端执行器150包括可移动地连接到安装梁180的五个第 二末端执行器150。安装梁180可移动地连接到滑架120,使得它可以根据成 型工具310的形状和几何结构沿竖直轴线112和水平轴线114移动。
65.在图8的示例性示例中,第二末端执行器a 150a可沿水平轴线114移动 以适应凹形、凸形或线性构造。该移动可以是被动的,使得它基于第二多个 155第二末端执行器150中的一个或多个不同的第二末端执行器150的移动而 移动。第二末端执行器a 150a连接到包括可充气气囊146的第二成型特征件 152。可以使用任何合适的连接和紧固方式来将第二成型特征件152固定到第 二末端执行器a 150a。在示例中,螺钉149用于将第二成型特征件152定位 和固定到第二末端执行器a 150a。
66.在示例中,第二末端执行器b 150b可沿水平轴线114和竖直轴线112移 动。沿水平轴线114的移动是被动的。沿竖直轴线112的移动通过任何合适 的方式控制。在示例中,第二末端执行器b 150b的移动由致动器147控制。 在示例中,致动器147是气动致动的成型缸147a。第二末端执行器b 150b的 移动可由控制器400控制。控制器400被构造成从一个或多个传感器410接 收数据并分析该数据以控制第二末端执行器b 150b的移动。控制器400可以 结合从所述一个或多个传感器410收集的数据利用一个或多个数字控制程序 420来确定第二末端执行器b 150b的恰当移动和放置,从而与成型工具310 恰当地对齐。
67.在示例中,第二末端执行器c 150c可沿水平轴线114和竖直轴线112移 动。沿竖直轴线112的移动通过任何合适的方式控制。在示例中,第二末端 执行器c 150c的移动由致动器147控制。在示例中,致动器147是气动致动 的成型缸147a。第二末端执行器c 150c的移动可由控制器400控制。控制器 400被构造成从一个或多个传感器410接收数据并分析该数据以控制第二末端 执行器c 150c的移动。控制器400可以结合从所述一个或多个传感器410收 集的数据利用一个或多个数字控制程序420来确定第二末端执行器c 150c的 恰当移动和放置,从而与成型工具310恰当地对齐。
68.在示例中,第二末端执行器d 150d可沿竖直轴线112移动。沿水平轴线 114的移动是被动的。沿竖直轴线112的移动通过任何合适的方式控制。在示 例中,第二末端执行器d 150d的移动由致动器147控制。在示例中,致动器 147是气动致动的成型缸147a。第二末端执行器d 150d的移动可由控制器400 控制。控制器400被构造成从一个或多个传感器410接收数据并分析该数据 以控制第二末端执行器d 150d的移动。控制器400可以结合从所述一个或多 个传感器410收集的数据利用一个或多个数字控制程序420来确定第二末端 执行器d 150d的恰当移动和放置,从而与成型工具310恰当地对齐。
69.在示例中,第二末端执行器e 150e可沿水平轴线114移动以适应凹形、 凸形或线性构造。该移动可以是被动的,使得它基于第二多个155第二末端 执行器150中的一个或多个不同的第二末端执行器150的移动而移动。第二 末端执行器e 150e连接到包括可充气气囊146的第二成型特征件152。可以 使用任何合适的连接和紧固方式来将第二成型特征件152固定到第二末端执 行器e 150e。
70.图3和图5图示了包括保护滑膜(protective slip film)160的成型设备100 的示例性示例。保护滑膜160可以是任何合适的材料,包括聚合物材料,例 如ptfe或fep。保护滑
膜160连接到至少一个可伸缩卷轴165。可伸缩卷轴 165被构造成向保护滑膜160提供恒定张力。保护滑膜160有利于防止复合材 料325的材料在成型工艺期间起褶。
71.图4a和图4b图示了枢转轴承组件170。成型设备100可以包括不止一个 枢转轴承组件170,枢转轴承组件170经由轴承安装座180a可移动地连接到 滑架120和安装梁180。枢转轴承组件170被构造成具有线性和径向构造。枢 转轴承组件170允许相对于第一多个145第一末端执行器140和第二多个155 第二末端执行器150调节偏航角。偏转角的调节使跨成型工具310(尤其是翼 梁成型工具314)的均匀压实力350成为可能。
72.图19图示了本文中的示例性方法200。公开了一种用于使复合零件375 成型的方法200。方法200包括在成型工具310的成型表面308上施加210至 少一个铺层320的复合材料325。方法200还包括用成型设备100在成型工具 310的成型表面308上使所述至少一个铺层320的复合材料325变形220。方 法200还包括使复合零件375前进230到后续工艺。在示例中,方法200的 成型设备100包括框架110。在示例中,框架110的形状通常为矩形。框架110 限定了竖直轴线112、水平轴线114和纵轴线116。框架110围绕滑架120, 滑架120具有与框架110大致相同但更小的形状,使得滑架120嵌套在框架 110内。在示例中,滑架120可移动地连接到框架110,使得它可以沿竖直轴 线112和水平轴线114枢转或旋转以适应任何特定的几何结构或构造并实现 最佳配合位置。
73.在示例中,方法200的成型设备100包括第一末端执行器140。第一末端 执行器140可移动地连接到滑架120。在示例中,第一末端执行器140可经由 致动器147移动。在示例中,致动器147是气动致动的成型缸147a。第一末 端执行器140可以包括一个或多个传感器410,所述一个或多个传感器410被 构造成检测成型工具310的位置。所述一个或多个传感器410可以与控制器 400通信。控制器400被构造成从所述一个或多个传感器410接收数据并分析 该数据以控制第一末端执行器140的移动。控制器400可以结合从所述一个 或多个传感器410收集的数据利用一个或多个数字控制程序420来确定第一 末端执行器140的恰当移动和放置。第一末端执行器140包括第一成型特征 件142。在示例中,第一成型特征件142是成型指状物148。在示例中,第一 成型特征件142是可充气气囊146。
74.在示例中,方法200的成型设备100包括第二末端执行器150。第二末端 执行器150可移动地连接到滑架120。在示例中,第一末端执行器140相对于 纵轴线116与第二末端执行器150横向相对。第一末端执行器140和第二末 端执行器150被构造成彼此独立地移动。在示例中,第一末端执行器140和 第二末端执行器150被构造成相对于纵轴线116独立地横向移动。
75.在示例中,第二末端执行器150可经由致动器147移动。在示例中,致 动器147是气动致动的成型缸147a。第二末端执行器150可以包括一个或多 个传感器410,所述一个或多个传感器410被构造成检测成型工具310的位置 和构造。所述一个或多个传感器410可以与控制器400通信。控制器400被 构造成接收来自所述一个或多个传感器410的数据并分析该数据以控制第二 末端执行器150的移动。控制器可以结合从所述一个或多个传感器410收集 的数据利用一个或多个数字控制程序420来确定第二末端执行器150的恰当 移动和放置。第二末端执行器包括第二成型特征件152。在示例中,第二成型 特征件152是成型指状物148。在示例中,第二成型特征件152是可充气气囊 146。致动器147和滑架120的组合用作驱动功能,从而以扫掠和一致运动的 形式提供跨成型工具310的所有几何表面的移动性。
76.在示例中,方法200的成型设备100包括可移动地连接到滑架120的脚 踏130。脚踏130可沿竖直轴线112移动。基于成型工具310的几何结构,脚 踏130可以具有平坦或弯曲的设计。在示例中,成型工具310是纵梁成型工 具316。在示例中,成型工具310是翼梁成型工具314。在示例中,成型工具 310是帽形纵梁成型工具312。在示例中,脚踏130位于第一末端执行器140 和第二末端执行器150之间。脚踏130被构造成经由任何合适的方式沿竖直 轴线112移动。在示例中,脚踏130的移动由致动器147控制。在示例中, 致动器147是气动致动的成型缸147a。在示例中,脚踏130的移动由至少一 个磁性开关控制,所述至少一个磁性开关被构造成检测脚踏130相对于成型 工具310的行进和位置。脚踏130被构造成向成型工具310施加压实力350。 施加的压实力350可以是可变的,也可以是一致的,这基于成型工具310的 几何结构。
77.在示例中,方法200的成型设备100包括铺层支撑特征件185。铺层支撑 特征件185可以位于脚踏130下方。铺层支撑特征件185可以被构造成在开 始成型之前支撑一个或多个铺层320的复合材料325。铺层支撑特征件185可 以进一步被构造成防止所述一个或多个铺层320的复合材料325在成型之前 或期间起皱。铺层支撑特征件185可以是机械的或者可以是空气驱动的。在 示例中,铺层支撑特征件185是气刀。
78.在示例中,方法200的成型设备100包括枢转轴承组件170。成型设备 100可以包括不止一个枢转轴承组件170,枢转轴承组件170经由轴承安装座 180a可移动地连接到滑架120和安装梁180。枢转轴承组件170被构造成具 有线性和径向构造。枢转轴承组件170允许相对于第一多个145第一末端执 行器140和第二多个155第二末端执行器150调节偏航角。偏转角的调节使 跨成型工具310(尤其是翼梁成型工具314)的均匀压实力350成为可能。
79.图11、图12和图13图示了用成型设备100在成型工具310的成型表面 308上使所述至少一个铺层320的复合材料325变形220的示例性系列。图 11图示了在翼梁成型工具314的成型表面308上使至少一个铺层320的复合 材料325变形220的开始。在示例中,脚踏130邻接成型表面308并且位于 第一多个145第一末端执行器140和第二多个155第二末端执行器150之间。 第一多个145第一末端执行器140布置成凸形构造并且向成型表面308施加 压实力350。第二多个155第二末端执行器150与第一多个145第一末端执行 器140横向相对,并且在向成型表面308施加压实力350的同时布置成凸形 构造。
80.图12图示了在翼梁成型工具314的成型表面308上使至少一个铺层320 的复合材料325变形220的进展。在横跨成型表面308施加恒定的压实力350 的同时,第一多个145第一末端执行器140已经移动穿过水平轴线114。此外, 第二多个155第二末端执行器150已经沿水平轴线114移动到翼梁成型工具 314的相反端。基于成型工具310的几何结构,第一多个145第一末端执行器 140和第二多个155第二末端执行器150沿水平轴线114的移动可以同时发生 或者可以独立发生。控制器400可以结合从一个或多个传感器410收集的数 据利用一个或多个数字控制程序420来确定第一多个145第一末端执行器140 和第二多个155第二末端执行器150的恰当移动和放置。
81.图13图示了在翼梁成型工具314的成型表面308上使至少一个铺层320 的复合材料325变形220的进一步进展。在横跨成型表面308施加恒定压实 力350的同时,第一多个145第一末端执行器140已经移动穿过水平轴线114 并沿竖直轴线112向下移动。此外,第二多个155第二末端执行器150已经 沿着翼梁成型工具314的相反端并且沿着水平轴线114沿
竖直轴线112向下 移动。
82.图22图示了本文中的示例性系统300。在示例中,公开了系统300。系 统300包括成型设备100、成型工具310和至少一个铺层320的复合材料325。 在示例中,成型工具310是翼梁成型工具314。在示例中,成型工具310是纵 梁成型工具316。在示例中,成型工具310是帽形纵梁成型工具312。
83.系统300的成型设备100包括框架110。在示例中,框架110的形状通常 为矩形。框架110限定了竖直轴线112、水平轴线114和纵轴线116。框架110 围绕滑架120,滑架120具有与框架110大致相同但更小的形状,使得滑架 120嵌套在框架110内。在示例中,滑架120可移动地连接到框架110,使得 它可以沿竖直轴线112和水平轴线114枢转或旋转以适应任何特定的几何结 构或构造并实现最佳配合位置。
84.在示例中,系统300的成型设备100包括第一末端执行器140。第一末端 执行器140可移动地连接到滑架120。在示例中,第一末端执行器140可经由 致动器147移动。例如,致动器147是气动致动的成型缸147a。第一末端执 行器140可以包括一个或多个传感器410,所述一个或多个传感器410被构造 成检测成型工具310的位置。一个或多个传感器410可以与控制器400通信。 控制器400被构造成从一个或多个传感器410接收数据并分析该数据以控制 第一末端执行器140的移动。控制器400可以结合从一个或多个传感器410 收集的数据利用一个或多个数字控制程序420来确定第一末端执行器140的 恰当移动和放置。第一末端执行器140包括第一成型特征件142。在示例中, 第一成型特征件142是成型指状物148。在示例中,第一成型特征件142是可 充气气囊146。
85.在示例中,系统300的成型设备100包括第二末端执行器150。第二末端 执行器150可移动地连接到滑架120。在示例中,第一末端执行器140相对于 纵轴线116与第二末端执行器150横向相对。第一末端执行器140和第二末 端执行器150被构造成彼此独立地移动。在示例中,第一末端执行器140和 第二末端执行器150被构造成相对于纵轴线116独立地横向移动。
86.在示例中,第二末端执行器150可经由致动器147移动。在示例中,致 动器147是气动致动的成型缸147a。第二末端执行器150可以包括一个或多 个传感器410,一个或多个传感器410被构造成检测成型工具310的位置和构 造。一个或多个传感器410可以与控制器400通信。控制器400被构造成接 收来自一个或多个传感器410的数据并分析该数据以控制第二末端执行器150 的移动。控制器可以结合从一个或多个传感器410收集的数据利用一个或多 个数字控制程序420来确定第二末端执行器150的恰当移动和放置。第二末 端执行器包括第二成型特征件152。在示例中,第二成型特征件152是成型指 状物148。在示例中,第二成型特征件152是可充气气囊146。
87.在示例中,系统300的成型设备100包括可移动地连接到滑架120的脚 踏130。脚踏130可沿竖直轴线112移动。基于成型工具310的几何结构,脚 踏130可以具有平坦或弯曲的设计。在示例中,成型工具310是纵梁成型工 具316。在示例中,成型工具310是翼梁成型工具314。在示例中,成型工具 310是帽形纵梁成型工具312。在示例中,脚踏130位于第一末端执行器140 和第二末端执行器150之间。脚踏130被构造成经由任何合适的方式沿竖直 轴线112移动。在示例中,脚踏130的移动由致动器147控制。在示例中, 致动器147是气动致动的成型缸147a。在示例中,脚踏130的移动由至少一 个磁性开关控制,所述至少一个磁性开
关被构造成检测脚踏130相对于成型 工具310的行进和位置。脚踏130被构造成向成型工具310施加压实力350。 施加的压实力350可以是可变的,也可以是一致的,这基于成型工具310的 几何结构。
88.在示例中,系统300的成型设备100包括铺层支撑特征件185。铺层支撑 特征件185可以位于脚踏130下方。铺层支撑特征件185可以被构造成在开 始成型之前支撑一个或多个铺层320的复合材料325。铺层支撑特征件185可 以进一步被构造成防止一个或多个铺层320的复合材料325在成型之前或期 间起皱。铺层支撑特征件185可以是机械的或者可以是空气驱动的。在示例 中,铺层支撑特征件185是气刀。
89.在示例中,系统300的成型设备100包括枢转轴承组件170。成型设备 100可以包括不止一个枢转轴承组件170,枢转轴承组件170经由轴承安装座 180a可移动地连接到滑架120和安装梁180。枢转轴承组件170被构造成具 有线性和径向构造。枢转轴承组件170允许相对于第一多个145第一末端执 行器140和第二多个155第二末端执行器150调节偏航角。偏航角的调节使 跨成型工具310(尤其是翼梁成型工具314)的均匀压实力350成为可能。
90.图18图示了复合制造系统600。在示例中,复合制造系统600包括层压 系统612(例如,层压子系统或站)、转移系统616(例如,转移子系统或站) 和成型系统622(例如,成型子系统或站)。在一个或多个示例中,复合制造 系统600还包括修整系统614(例如,修整子系统或站)和废料去除系统642 (例如,废料去除子系统或站)。在一个或多个示例中,复合制造系统600 进一步包括膜去除系统660(例如,膜去除子系统或站)。在一个或多个示例 中,复合制造系统600另外包括承载板制备系统662(例如,承载板制备子系 统或站)。在一个或多个示例中,复合制造系统600还包括定位系统644(例 如,定位子系统)。
91.在一个或多个示例中,复合制造系统600包括工具转移装置646。工具转 移装置646被构造成传送成型工具310。例如,工具转移装置646包括或采取 移动平台的形式,该移动平台支撑成型工具310并使成型工具310在复合制 造系统600的实施复合制造工艺的复合结构制作操作的子系统之间移动。
92.在示例中,用于制作复合零件375的复合制造系统600包括铺层承载板 604,该铺层承载板604包括被构造成支撑至少一个铺层320的复合材料325 的铺层支撑表面608。复合制造系统600还包括被构造成传送铺层承载板604 的承载板转移装置610、被构造成选择性地将所述至少一个铺层320的复合材 料325施加到铺层承载板604的铺层支撑表面608的层压系统612、被构造成 从承载板转移装置610移除铺层承载板604并将所述至少一个铺层320的复 合材料325施加到成型工具310的成型表面308的至少一部分的转移系统616 以及被构造成使所述至少一个铺层320的复合材料325在成型工具310的成 型表面308的所述至少一部分上成型的成型系统622。成型系统622包括成型 设备100。
93.图21图示了制造方法1000的流程图。公开了一种制作复合零件375的 制造方法1000。在示例中,制造方法1000包括各种步骤。在示例中,制造方 法1000包括使用承载板转移装置610将铺层承载板604传送到层压系统612。 制造方法1000包括使用层压系统612选择性地将至少一个铺层320的复合材 料325施加到铺层承载板604的铺层支撑表面608。制造方法1000包括使用 承载板转移装置610将铺层承载板604从层压系统612传送到转移系统616。 在示例中,制造方法1000包括从承载板转移装置610移除铺层承载板604并 使用转移系统616将所述至少一个铺层320的复合材料325施加到成型工具310的成型表面308的至
少一部分的步骤。制造方法1000包括使用成型系统 622使至少一个铺层320的复合材料325在成型工具310的成型表面308的至 少一部分上成型的步骤。在示例中,成型系统622包括成型设备100。
94.在一个或多个示例中,制造方法1000包括制备铺层承载板104的步骤(框 1002)。在一个或多个示例中,制造方法1000包括使用承载板转移装置610 选择性地施加固持真空以将膜126固持在基板124上的步骤(框1004)。在 一个或多个示例中,制造方法1000包括使用承载板转移装置610将铺层承载 板104传送到层压系统612的步骤(框1006)。在一个或多个示例中,制造 方法1000包括使用层压系统612选择性地将复合铺层106施加到铺层承载板 104的铺层支撑表面108的步骤(框1008)。在一个或多个示例中,制造方 法1000包括使用承载板转移装置610将铺层承载板104从层压系统612传送 到修整系统614的步骤(框1010)。在一个或多个示例中,制造方法1000包 括使用修整系统614选择性地将复合铺层106切割成预定形状的步骤(框 1012)。
95.在一个或多个示例中,制造方法1000包括在选择性地切割至少一个复合 铺层106的步骤(框1012)之后使用废料去除系统642从铺层支撑表面108 去除所述至少一个复合铺层106的残余物的步骤(框1014)。在一个或多个 示例中,制造方法1000包括使用承载板转移装置610选择性地将固持真空从 膜126的选定区域去除的步骤。在一个或多个示例中,制造方法1000还包括 使用承载板转移装置610将铺层承载板104从修整系统614传送到转移系统 616的步骤(框1016)。
96.在一个或多个示例中,制造方法1000包括从承载板转移装置610移除铺 层承载板104的步骤(框1018)和使用转移系统616来重新定向(例如,旋 转)铺层承载板104的步骤(框1022)。在一个或多个示例中,制造方法1000 包括使用转移系统616维持固持真空以将膜126固持在基板124上的步骤(框 1020)。在一个或多个示例中,制造方法1000包括使用工具转移装置646将 成型工具310传送到转移系统616的步骤(框1024)。在一个或多个示例中, 制造方法1000包括使用转移系统616将复合铺层106施加到成型工具310的 成型表面118的至少一部分的步骤(框1026)。在一个或多个示例中,制造 方法1000包括在将复合铺层106施加到成型工具310的成型表面118的至少 一部分的步骤(框1026)之后从基板124释放膜126的步骤和使用转移系统616将铺层承载板104(例如,基板124)从成型工具310移除的步骤。例如, 制造方法1000包括使用转移系统616选择性地去除固持真空以从基板124释 放膜126同时固持基板124的步骤(框1028)。
97.在一个或多个示例中,制造方法1000包括使用工具转移装置646将成型 工具310从转移系统616传送到成型系统122的步骤(框1030)。在一个或 多个示例中,制造方法1000包括使用成型系统122使复合铺层106在成型工 具310的成型表面118的所述至少一部分上成型的步骤(框1032)。在一个 或多个示例中,制造方法1000包括使用膜去除系统660从复合铺层106去除 膜126的步骤(框1034)。在一个或多个示例中,制造方法1000包括使用转 移系统616将铺层承载板104(例如,基板124)返回到承载板转移装置610 的步骤(框1036)。在一个或多个示例中,上述操作重复多次以使复合结构 102完全成型(框1038),此时工艺终止。在示例中,制造方法1000的成型 设备100包括框架110。在示例中,框架110的形状通常为矩形。框架110限 定了竖直轴线112、水平轴线114和纵轴线116。框架110围绕滑架120,滑 架120具有与框架110大致相同但更小的形状,使得滑架120嵌套在框架110 内。在示例
中,滑架120可移动地连接到框架110,使得它可以沿竖直轴线 112和水平轴线114枢转或旋转以适应任何特定的几何结构或构造并实现最佳 配合位置。
98.在示例中,成型设备100包括第一末端执行器140。第一末端执行器140 可移动地连接到滑架120。在示例中,第一末端执行器140可经由致动器147 移动。在示例中,致动器147是气动致动的成型缸147a。第一末端执行器140 可以包括一个或多个传感器410,所述一个或多个传感器410被构造成检测成 型工具310沿着包括竖直轴线112、水平轴线114和纵轴线116的数个轴线的 位置,以便在复杂的成型工具310上进行精确成型。一个或多个传感器410 可以与控制器400通信。控制器400被构造成从一个或多个传感器410接收 数据并分析该数据以控制第一末端执行器140的移动。控制器400可以结合 从一个或多个传感器410收集的数据利用一个或多个数字控制程序420来确 定第一末端执行器140的恰当移动和放置。
99.第一末端执行器140包括第一成型特征件142。在示例中,第一成型特征 件142是成型指状物148。在示例中,第一成型特征件142是可充气气囊146。 可充气气囊146被构造成通过施加一致的压实力350而被动跟随成型工具310 的轮廓。压实力350可以变化。在示例中,压实力350可以高达每线性英寸 20磅。可充气气囊146的轮廓或取向可以用一个或多个顶起螺钉146a操纵以 符合沿着成型工具310长度的凹形或凸形轮廓并控制可充气气囊146的半径。 图17a和图17b图示了相对于可充气气囊146的顶起螺钉146a。
100.在示例中,成型设备100包括第二末端执行器150。第二末端执行器150 可移动地连接到滑架120。在示例中,第一末端执行器140相对于纵轴线116 与第二末端执行器150横向相对。第一末端执行器140和第二末端执行器150 被构造成彼此独立地移动。在示例中,第一末端执行器140和第二末端执行 器150被构造成相对于纵轴线116独立地横向移动。
101.在示例中,第二末端执行器150可经由致动器147移动。在示例中,致 动器147是气动致动的成型缸147a。第二末端执行器150可以包括一个或多 个传感器410,所述一个或多个传感器410被构造成检测成型工具310的位置 和构造。所述一个或多个传感器410可以与控制器400通信。控制器400被 构造成接收来自所述一个或多个传感器410的数据并分析该数据以控制第二 末端执行器150的移动。控制器可以结合从所述一个或多个传感器410收集 的数据利用一个或多个数字控制程序420来确定第二末端执行器150的恰当 移动和放置。第二末端执行器包括第二成型特征件152。在示例中,第二成型 特征件152是成型指状物148。在示例中,第二成型特征件152是可充气气囊 146。
102.在示例中,制造方法1000的成型设备100包括可移动地连接到滑架120 的脚踏130。脚踏130可沿竖直轴线112移动。基于成型工具310的几何结构, 脚踏130可以具有平坦或弯曲的设计。在示例中,脚踏130位于第一末端执 行器140和第二末端执行器150之间。脚踏130被构造成经由任何合适的方 式沿竖直轴线112移动,并且进一步被构造成将一个或多个铺层320的复合 材料325压到成型工具310的成型表面308上并将所述一个或多个铺层320 的复合材料325保持在适当位置。在示例中,脚踏130的移动由致动器147 控制。在示例中,致动器147是气动致动的成型缸147a。在示例中,脚踏130 的移动由至少一个磁性开关控制,所述至少一个磁性开关被构造成检测脚踏 130相对于成型工具310的行进和位置。脚踏130被构造成向成型工具310施 加压实力350。施加的压实力350可以是可变的,也可以是一致的,这基于成 型工具310的几何结构。
103.在示例中,成型设备100包括框架110。在示例中,框架110的形状通常 为矩形。框架110限定了竖直轴线112、水平轴线114和纵轴线116。框架110 围绕滑架120,滑架120具有与框架110大致相同但更小的形状,使得滑架 120嵌套在框架110内。在示例中,滑架120可移动地连接到框架110,使得 它可以沿竖直轴线112和水平轴线114枢转或旋转以适应任何特定的几何结 构或构造并实现最佳配合位置。
104.在示例中,制造方法1000的成型设备100包括第一末端执行器140。第 一末端执行器140可移动地连接到滑架120。在示例中,第一末端执行器140 可经由致动器147移动。在示例中,致动器147是气动致动的成型缸147a。 第一末端执行器140可以包括一个或多个传感器410,所述一个或多个传感器 410被构造成检测成型工具310沿着包括竖直轴线112、水平轴线114和纵轴 线116的数个轴线的位置,以便在复杂的成型工具310上进行精确成型。一 个或多个传感器410可以与控制器400通信。控制器400被构造成从一个或 多个传感器410接收数据并分析该数据以控制第一末端执行器140的移动。 控制器400可以结合从一个或多个传感器410收集的数据利用一个或多个数 字控制程序420来确定第一末端执行器140的恰当移动和放置。
105.第一末端执行器140包括第一成型特征件142。在示例中,第一成型特征 件142是成型指状物148。在示例中,第一成型特征件142是可充气气囊146。 可充气气囊146被构造成通过施加一致的压实力350而被动跟随成型工具310 的外形。压实力350可以变化。在示例中,压实力350可以高达每线性英寸 20磅。可充气气囊146的轮廓或取向可以用一个或多个顶起螺钉146a操纵以 符合沿着成型工具310长度的凹形或凸形轮廓并控制可充气气囊146的半径。 图17a和图17b图示了相对于可充气气囊146的顶起螺钉146a。
106.在示例中,成型设备100包括第二末端执行器150。第二末端执行器150 可移动地连接到滑架120。在示例中,第一末端执行器140相对于纵轴线116 与第二末端执行器150横向相对。第一末端执行器140和第二末端执行器150 被构造成彼此独立地移动。在示例中,第一末端执行器140和第二末端执行 器150被构造成相对于纵轴线116独立地横向移动。
107.在示例中,第二末端执行器150可经由致动器147移动。在示例中,致 动器147是气动致动的成型缸147a。第二末端执行器150可以包括一个或多 个传感器410,一个或多个传感器410被构造成检测成型工具310的位置和构 造。一个或多个传感器410可以与控制器400通信。控制器400被构造成接 收来自一个或多个传感器410的数据并分析该数据以控制第二末端执行器150 的移动。控制器可以结合从一个或多个传感器410收集的数据利用一个或多 个数字控制程序420来确定第二末端执行器150的恰当移动和放置。第二末 端执行器包括第二成型特征件152。在示例中,第二成型特征件152是成型指 状物148。在示例中,第二成型特征件152是可充气气囊146。
108.在示例中,成型设备100包括可移动地连接到滑架120的脚踏130。脚踏 130可沿竖直轴线112移动。基于成型工具310的几何结构,脚踏130可以具 有平坦或弯曲的设计。在示例中,脚踏130位于第一末端执行器140和第二 末端执行器150之间。脚踏130被构造成经由任何合适的方式沿竖直轴线112 移动,并且进一步被构造成将一个或多个铺层320的复合材料325按压到成 型工具310的成型表面308上并将一个或多个铺层320的复合材料325保持 在适当位置。在示例中,脚踏130的移动由致动器147控制。在示例中,致 动器147是气动致动的成型缸147a。在示例中,脚踏130的移动由至少一个 磁性开关控制,所述至少一个磁
性开关被构造成检测脚踏130相对于成型工 具310的行进和位置。脚踏130被构造成向成型工具310施加压实力350。施 加的压实力350可以是可变的,也可以是一致的,这基于成型工具310的几 何结构。
109.在示例中,成型设备100包括框架110。在示例中,框架110的形状通常 为矩形。框架110限定了竖直轴线112、水平轴线114和纵轴线116。框架110 围绕滑架120,滑架120具有与框架110大致相同但更小的形状,使得滑架 120嵌套在框架110内。在示例中,滑架120可移动地连接到框架110,使得 它可以沿竖直轴线112和水平轴线114枢转或旋转以适应任何特定的几何结 构或构造并实现最佳配合位置。
110.在示例中,成型设备100包括第一末端执行器140。第一末端执行器140 可移动地连接到滑架120。在示例中,第一末端执行器140可经由致动器147 移动。在示例中,致动器147是气动致动的成型缸147a。第一末端执行器140 可以包括一个或多个传感器410,一个或多个传感器410被构造成检测成型工 具310沿着包括竖直轴线112、水平轴线114和纵轴线116的数个轴线的位置, 以便在复杂的成型工具310上进行精确成型。一个或多个传感器410可以与 控制器400通信。控制器400被构造成从一个或多个传感器410接收数据并 分析该数据以控制第一末端执行器140的移动。控制器400可以结合从一个 或多个传感器410收集的数据利用一个或多个数字控制程序420来确定第一 末端执行器140的恰当移动和放置。
111.第一末端执行器140包括第一成型特征件142。在示例中,第一成型特征 件142是成型指状物148。在示例中,第一成型特征件142是可充气气囊146。 可充气气囊146被构造成通过施加一致的压实力350而被动跟随成型工具310 的外形。压实力350可以变化。在示例中,压实力350可以高达每线性英寸 20磅。可充气气囊146的轮廓或取向可以用一个或多个顶起螺钉146a操纵以 符合沿着成型工具310长度的凹形或凸形轮廓并控制可充气气囊146的半径。 图17a和图17b图示了相对于可充气气囊146的顶起螺钉146a。
112.在示例中,制造方法1000的成型设备100包括第二末端执行器150。第 二末端执行器150可移动地连接到滑架120。在示例中,第一末端执行器140 相对于纵轴线116与第二末端执行器150横向相对。第一末端执行器140和 第二末端执行器150被构造成彼此独立地移动。在示例中,第一末端执行器 140和第二末端执行器150被构造成相对于纵轴线116独立地横向移动。
113.在示例中,第二末端执行器150可经由致动器147移动。在示例中,致 动器147是气动致动的成型缸147a。第二末端执行器150可以包括一个或多 个传感器410,一个或多个传感器410被构造成检测成型工具310的位置和构 造。一个或多个传感器410可以与控制器400通信。控制器400被构造成接 收来自一个或多个传感器410的数据并分析该数据以控制第二末端执行器150 的移动。控制器可以结合从一个或多个传感器410收集的数据利用一个或多 个数字控制程序420来确定第二末端执行器150的恰当移动和放置。第二末 端执行器包括第二成型特征件152。在示例中,第二成型特征件152是成型指 状物148。在示例中,第二成型特征件152是可充气气囊146。
114.在示例中,成型设备100包括可移动地连接到滑架120的脚踏130。脚踏 130可沿竖直轴线112移动。基于成型工具310的几何结构,脚踏130可以具 有平坦或弯曲的设计。在示例中,脚踏130位于第一末端执行器140和第二 末端执行器150之间。脚踏130被构造成经由
任何合适的方式沿竖直轴线112 移动并且进一步被构造成将一个或多个铺层320的复合材料325按压到成型 工具310的成型表面308上并将一个或多个铺层320的复合材料325保持在 适当位置。在示例中,脚踏130的移动由致动器147控制。在示例中,致动 器147是气动致动的成型缸147a。在示例中,脚踏130的移动由至少一个磁 性开关控制,至少一个磁性开关被构造成检测脚踏130相对于成型工具310 的行进和位置。脚踏130被构造成向成型工具310施加压实力350。施加的压 实力350可以是可变的,或者可以是一致的,这基于成型工具310的几何结 构。
115.本公开的示例可以在如图23所示的飞机制造和服务方法1100和如图24 所示的飞机1102的上下文中进行描述。在预生产期间,飞机制造和服务方法 1100可以包括飞机1102的规格和设计1104以及材料采购1106。在生产期间, 飞机1102的部件/子组件制造1108和系统集成1110发生。此后,飞机1102 可以通过认证和交付1112以便进行服务1114。在服务客户期间,飞机1102 被安排进行例行维护和服务1116,这还可以包括改造、重新配置、翻新等等。
116.飞机制造和服务方法1100的步骤中的每一个可以由系统集成商、第三方 和/或运营商(例如,客户)执行或实施。就本描述的目的而言,系统集成商 可包括但不限于任何数量的飞机制造商和主要系统分包商;第三方可包括但 不限于任何数量的供应商、分包商和供应商;运营商可以是航空公司、租赁 公司、军事实体、服务机构等。
117.如图24所示,通过示例飞机制造和服务方法1100生产的飞机1102可以 包括具有多个系统1120和内部1122的机身1118。所述多个系统1120的示例 可以包括推进系统1124、电气系统1126、液压系统1128和环境系统1130中 的一个或多个。可以包括任意数量的其他系统。
118.所公开的方法和系统可以在飞机制造和服务方法1100的任何一个或多个 阶段期间采用。作为一个示例,对应于部件/子组件制造1108、系统集成1110 和/或维护和服务1116的部件或子组件可以使用所公开的方法和系统进行组 装。作为另一个示例,机身1118可以使用所公开的方法和系统来构造。而且, 在部件/子组件制造1108和/或系统集成1110期间可以利用一个或多个设备示 例、方法示例或其组合,例如,通过大幅加快飞机1102(例如机身1118和/ 或内部1122)的组装或降低其成本。类似地,当飞机1102在服务中时,可以 利用系统示例、方法示例或其组合中的一个或多个进行例如但不限于维护和 服务1116。
119.所公开示例的各方面可以以软件、硬件、固件或其组合来实现。系统的 各种元素可以单独地或组合地实现为有形地包含在机器可读存储设备中以供 处理器执行的计算机程序产品。示例的各个步骤可由计算机处理器执行,该 计算机处理器执行有形地包含在计算机可读介质上的程序以通过对输入进行 操作并生成输出来执行功能。计算机可读介质可以是例如存储器、诸如光盘 或闪存驱动器之类的可移动介质,使得包含所公开示例的各方面的计算机程 序能够被加载到计算机上。
120.在飞机的上下文中描述了上述方法和系统。然而,本领域普通技术人员 将容易地认识到所公开的方法和系统适用于多种应用,并且本公开不限于飞 机制造应用。例如,所公开的方法和系统可以在各种类型的交通工具(包括 例如直升机、客船、汽车、海洋产品(船、摩托等)及诸如此类)中实施。 非交通工具应用也被预期到。
121.此外,尽管以上描述描述了可用于根据各种法规(例如,商业、军事等) 在航空工
业中制造飞机或飞机部件的方法和系统,但预期所公开的方法和系 统根据适用的行业标准可以实施以便于任何行业中零件的制造。可以依据特 定应用选择和定制具体方法和系统。
122.虽然保护范围由随附权利要求确定,但可以通过多种方式实现本公开, 这些方式包括但不限于根据以下条款所述的方式:
123.条款1.一种成型设备(100),包括:
124.框架(110),其限定竖直轴线(112)、水平轴线(114)和纵轴线(116);
125.滑架(120),其可移动地连接到所述框架(110);
126.脚踏(130),其可移动地连接到所述滑架(120);
127.第一末端执行器(140),其可移动地连接到所述滑架(120);和
128.第二末端执行器(150),其可移动地连接到所述滑架(120)。
129.条款2.根据条款1所述的成型设备(100),其中所述第一末端执行器 (140)相对于所述纵轴线(116)与所述第二末端执行器(150)横向相对。
130.条款3.根据条款1或2所述的成型设备(100),其中所述第一末端执 行器(140)包括第一成型特征件(142)并且所述第二末端执行器(150)包 括第二成型特征件(152)。
131.条款4.根据条款3所述的成型设备(100),其中所述第一成型特征件 (142)包括可充气气囊(146)。
132.条款5.根据条款3或4所述的成型设备(100),其中所述第二成型特 征件(152)包括可充气气囊(146)。
133.条款6.根据条款3所述的成型设备(100),其中所述第一成型特征件 (142)包括成型指状物(148)。
134.条款7.根据条款3或6所述的成型设备(100),其中所述第二成型特 征件(152)包括成型指状物(148)。
135.条款8.根据条款1所述的成型设备(100),其中所述脚踏(130)位于 所述第一末端执行器(140)和所述第二末端执行器(150)之间。
136.条款9.根据条款1所述的成型设备(100),其中所述第一末端执行器 (140)和所述第二末端执行器(150)被构造成相对于所述纵轴线(116)独 立地横向移动。
137.条款10.根据条款1-9中任一项所述的成型设备(100),包括沿所述纵 轴线(116)延伸的第一多个(145)所述第一末端执行器(140)以及沿所述 纵轴线(116)延伸并且与所述第一多个(145)横向相对的第二多个(155) 所述第二末端执行器(150)。
138.条款11.根据条款10所述的成型设备(100),其中所述第一多个(145) 中的每个第一末端执行器(140)可独立移动,使得所述第一多个(145)可 以形成凸形、凹形或线性构造。
139.条款12.根据条款1-11中任一项所述的成型设备(100),包括保护滑膜 (160)。
140.条款13.根据条款12所述的成型设备(100),其中所述保护滑膜(160) 连接到至少一个可伸缩卷轴(165)。
141.条款14.根据条款1-13中任一项所述的成型设备(100),其中所述脚踏 (130)被构造成沿所述竖直轴线移动并施加压实力(112)。
142.条款15.一种用于使复合零件(375)成型的方法(200),该方法(200) 包括:
143.在成型工具(310)的成型表面(308)上施加(210)至少一个铺层(320) 的复合材料(325);以及
144.用根据权利要求1所述的成型设备(100)在所述成型工具(310)的所 述成型表面(308)上使所述至少一个铺层(320)的复合材料(325)变形(220)。
145.条款16.根据条款15所述的方法(200),其中所述成型工具(310)是 翼梁成型工具(314)。
146.条款17.根据条款15或16所述的方法(200),其中所述成型工具(310) 是纵梁成型工具(316)。
147.条款18.根据条款15-17中任一项所述的方法(200),其中所述成型工 具(310)是帽形纵梁成型工具(312)。
148.条款19.一种用于使复合零件(375)成型的系统(300),该系统(300) 包括:
149.根据权利要求1所述的成型设备(100);
150.成型工具(310);和
151.至少一个铺层(320)的复合材料(325)。
152.条款20.根据条款19所述的系统(300),其中所述成型工具(310)是 翼梁成型工具(314)。
153.条款21.根据条款19或20所述的系统(300),其中所述成型工具(310) 是纵梁成型工具(316)。
154.条款22.根据条款19-21中任一项所述的系统(300),其中所述成型工 具(310)是帽形纵梁成型工具(312)。
155.条款23.一种用于制作复合零件(375)的复合制造系统(600),该复 合制造系统(600)包括:
156.铺层承载板(604),其包括被构造成支撑至少一个铺层(320)的复合 材料(325)的铺层支撑表面(608);
157.承载板转移装置(610),其被构造成传送所述铺层承载板(604);
158.层压系统(612),其被构造成选择性地将所述至少一个铺层(320)的 复合材料(325)施加到所述铺层承载板(604)的所述铺层支撑表面(608);
159.转移系统(616),其被构造成从所述承载板转移装置(610)移除所述 铺层承载板(604)并将所述至少一个铺层(320)的复合材料(325)施加到 成型工具(310)的成型表面(308)的至少一部分;和
160.成型系统(622),其被构造成使所述至少一个铺层(320)的复合材料 (325)在所述成型工具(310)的所述成型表面(308)的所述至少一部分上 成型,所述成型系统(622)包括:
161.根据条款1所述的成型设备(100)。
162.条款24.一种制作复合零件(375)的制造方法(700),该制造方法(700) 包括以下步骤:
163.使用承载板转移装置(610)将铺层承载板(604)传送(1006)到层压 系统(612);
164.使用所述层压系统(612)选择性地将至少一个铺层(320)的复合材料 (325)施加(1008)到所述铺层承载板(604)的铺层支撑表面(608);
165.使用所述承载板转移装置(610)将所述铺层承载板(604)从所述层压 系统(612)传送(1010)到转移系统(616);
166.从所述承载板转移装置(110)移除(1014)所述铺层承载板(604), 并使用所述转移系统(616)将所述至少一个铺层(320)的复合材料(325) 施加(1026)到成型工具(310)的成型表面(308)的至少一部分;以及
167.使用成型系统(622)使所述至少一个铺层(320)的复合材料(325)在 所述成型工具(320)的所述成型表面(308)的所述至少一部分上成型(1032), 所述成型系统(622)包括:
168.根据条款1所述的成型设备(100)。
169.一个示例的所描述的特征、优点和特性可以以任何合适的方式组合在一 个或多个其他示例中。相关领域的技术人员将认识到,可以在没有特定示例 的一个或多个具体特征或优点的情况下实践本文描述的示例。在其他情况下, 在某些示例中可以认识到可能并非在所有示例中都存在的附加特征和优点。 此外,尽管已经示出并描述了成型设备100、方法200和系统300的各种示例, 但是本领域技术人员在阅读说明书后可以想到修改。本技术包括这样的修改 并且仅由权利要求的范围限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。