1.本公开一般而言涉及控制方法、非易失记录介质、移动体系统以及部件安装系统,更详细而言涉及利用在移动面上移动的移动体的控制方法、非易失记录介质、移动体系统以及部件安装系统。
背景技术:
2.在文献1(jp2002-039786a)中公开了一种无人搬送车(移动体)。该无人搬送车具备通过行驶马达的驱动而旋转的两个操舵轮(驱动轮)。无人搬送车利用转向马达使两个操舵轮旋转,由此在期望的移动方向上移动。
技术实现要素:
3.发明要解决的课题
4.本公开的目的在于,提供一种能够使移动体的位置调整的精度提高的控制方法、非易失记录介质、移动体系统以及部件安装系统。
5.用于解决课题的手段
6.本公开的一个方式涉及的控制方法是在移动面上移动的移动体的控制方法。所述移动体具有多个传感器和多个驱动轮。从所述多个传感器中选择的第1传感器在第1探测范围和轨道重叠时,对所述第1探测范围内的所述轨道的位置进行探测。所述轨道为了引导所述移动体而设置于所述移动面。从所述多个传感器中选择的与所述第1传感器不同的第2传感器在第2探测范围和所述轨道重叠时,对所述第2探测范围内的所述轨道的位置进行探测。从所述多个传感器中选择的与所述第2传感器不同的第3传感器在第3探测范围和所述轨道重叠时,对所述第3探测范围内的所述轨道的位置进行探测。所述控制方法具有第1回旋步骤和第2回旋步骤。所述第1回旋步骤是如下步骤,即,从所述第1探测范围和所述轨道重叠的状态起,直至所述第2传感器探测到在所述第2探测范围内的第1目标位置有所述轨道的状态为止,控制所述多个驱动轮,使得所述移动体以所述第1探测范围中的与所述轨道重叠的位置为回旋中心进行回旋。所述第2回旋步骤是如下步骤,即,在所述第1回旋步骤之后,直至所述第3传感器探测到在所述第3探测范围内的第2目标位置有所述轨道的状态为止,控制所述多个驱动轮,使得所述移动体以所述第1目标位置为回旋中心进行回旋。
7.本公开的一个方式涉及的程序是用于使一个以上的处理器执行所述控制方法的程序。
8.本公开的一个方式涉及的非易失记录介质是记录有用于使一个以上的处理器执行所述控制方法的程序的非易失记录介质。
9.本公开的一个方式涉及的移动体系统具备移动体和控制部。所述移动体具有多个传感器和多个驱动轮。所述控制部对所述多个驱动轮进行控制,使所述移动体在移动面上移动。从所述多个传感器中选择的第1传感器在第1探测范围和轨道重叠时,对所述第1探测范围内的所述轨道的位置进行探测。所述轨道为了引导所述移动体而设置于所述移动面。
从所述多个传感器中选择的与所述第1传感器不同的第2传感器在第2探测范围和所述轨道重叠时,对所述第2探测范围内的所述轨道的位置进行探测。从所述多个传感器中选择的与所述第2传感器不同的第3传感器在第3探测范围和所述轨道重叠时,对所述第3探测范围内的所述轨道的位置进行探测。所述控制部执行第1回旋步骤和第2回旋步骤。所述第1回旋步骤是如下步骤,即,从所述第1探测范围和所述轨道重叠的状态起,直至所述第2传感器探测到在所述第2探测范围内的第1目标位置有所述轨道的状态为止,控制所述多个驱动轮,使得所述移动体以所述第1探测范围中的与所述轨道重叠的位置为回旋中心进行回旋。所述第2回旋步骤是如下步骤,即,在所述第1回旋步骤之后,直至所述第3传感器探测到在所述第3探测范围内的第2目标位置有所述轨道的状态为止,控制所述多个驱动轮,使得所述移动体以所述第1目标位置为回旋中心进行回旋。
10.本公开的一个方式涉及的部件安装系统具备所述移动体系统和至少一个部件安装设备。所述部件安装设备将部件安装于基板。所述部件安装设备具有:供给所述部件的部件供给装置、和包含安装头的安装主体。所述安装头将从所述部件供给装置供给的所述部件安装于所述基板。通过所述移动体系统的所述移动体沿着所述轨道移动,从而所述部件供给装置被搬送至所述安装主体。
11.发明效果
12.本公开存在能够使移动体的位置调整的精度提高的优点。
附图说明
13.图1是包含一实施方式涉及的移动体系统的控制系统的框图。
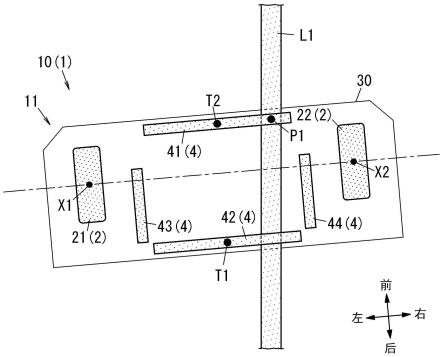
14.图2是包含上述移动体系统的部件安装系统的俯视图。
15.图3是示出上述移动体系统的动作例的流程图。
16.图4是示出上述移动体系统的回旋动作的开始时间点的状态的俯视图。
17.图5是示出上述移动体系统的回旋动作的中途经过的俯视图。
18.图6是示出上述移动体系统的回旋动作的中途经过的俯视图。
19.图7是示出上述移动体系统的回旋动作的中途经过的俯视图。
20.图8是示出上述移动体系统的回旋动作的中途经过的俯视图。
21.图9是示出上述移动体系统的回旋动作的结束时间点的状态的俯视图。
22.图10是示出上述移动体系统的动作例的俯视图。
23.图11是示出上述移动体系统的动作例的俯视图。
24.图12是示出变形例1涉及的移动体系统的动作例的俯视图。
25.图13是示出变形例2涉及的移动体系统的动作例的俯视图。
26.图14是示出变形例3涉及的移动体系统的动作例的俯视图。
27.符号说明
28.1移动体;
29.2驱动轮;
30.4、122传感器;
31.8安装主体;
32.9部件安装设备;
33.10移动体系统;
34.11搬送装置;
35.12搬送物;
36.51控制部;
37.123前端;
38.a1物体探测区域;
39.a10搬送装置区域;
40.a20搬送物区域;
41.b1移动面;
42.d1、d2转动方向;
43.f1部件供给装置;
44.l1轨道;
45.p1位置;
46.t1第1目标位置;
47.t2第2目标位置。
具体实施方式
48.(实施方式)
49.以下,利用附图对实施方式涉及的控制方法、程序、移动体系统以及部件安装系统进行说明。不过,下述的实施方式只不过为本公开的各种各样的实施方式之一。下述的实施方式只要能够达成本公开的目的,就能够根据设计等进行种种变更。此外,在下述的实施方式中说明的各图为示意性的图,图中的各构成要素的大小以及厚度各自之比不限于必定反映了实际的尺寸比。
50.(概要)
51.本实施方式涉及的控制方法通过控制系统100(参照图1)来实现。如图1所示,控制系统100具备移动体系统10和上级系统7。移动体系统10具备移动体1。移动体1在移动面b1(图2)上移动。控制方法是用于控制移动体1以使移动体1(参照图2)追踪轨道l1(参照图2)的方法。
52.移动体1例如被导入到物流中心(包含配送中心)、工厂、办公室、店铺、学校、或者医院等设施。移动面b1是移动体1在其上移动的面。当移动体1在室内移动的情况下,设施的底面等相当于移动面b1,当移动体1在室外移动的情况下,地面等相当于移动面b1。以下,对将移动体1导入到工厂的情况进行说明。另外,在图2以外的附图中,省略了移动面b1的图示。
53.本实施方式的控制方法是在移动面b1上移动的移动体1的控制方法。如图2所示,移动体1具有多个传感器4和多个驱动轮2。从多个传感器4中选择的第1传感器在第1探测范围和轨道l1重叠时,对第1探测范围内的轨道l1的位置进行探测。轨道l1为了引导移动体1而设置于移动面b1。从多个传感器4中选择的与第1传感器不同的第2传感器在第2探测范围和轨道l1重叠时,对第2探测范围内的轨道l1的位置进行探测。从多个传感器4中选择的与第2传感器不同的第3传感器在第3探测范围和轨道l1重叠时,对第3探测范围内的轨道l1的
位置进行探测。
54.如图3所示,控制方法具有第1回旋步骤(步骤st4)和第2回旋步骤(步骤st7)。第1回旋步骤是如下步骤,即,从第1探测范围和轨道l1重叠的状态起,直至第2传感器探测到在第2探测范围内的第1目标位置t1(参照图4)有轨道l1的状态为止,控制多个驱动轮2,使得移动体1以第1探测范围中的与轨道l1重叠的位置p1(参照图4)为回旋中心进行回旋。第2回旋步骤是如下步骤,即,在第1回旋步骤之后,直至第3传感器探测到在第3探测范围内的第2目标位置t2(参照图4)有轨道l1的状态为止,控制多个驱动轮2,使得移动体1以第1目标位置t1为回旋中心进行回旋。
55.根据本实施方式的控制方法,通过第1回旋步骤调整移动体1的位置,然后,通过第2回旋步骤微调整移动体1的位置。因而,与仅通过一次回旋来调整移动体1的位置的情况相比较,能够使相对于轨道l1的位置调整的精度提高。
56.在第1回旋步骤中,调整第2传感器和轨道l1的位置关系。在第2回旋步骤中,调整第3传感器和轨道l1的位置关系。通过执行第1回旋步骤以及第2回旋步骤两者,从而移动体1的朝向也调整为期望的朝向。
57.在本公开中,所谓移动体1“进行回旋”,意味着包含移动体1一边前进或者后退一边改变朝向、和移动体1既不前进也不后退地改变朝向这两者。在第1回旋步骤以及第2回旋步骤中,移动体1既不前进也不后退地改变朝向。
58.上述的控制方法也可以通过(计算机)程序、或者记录有程序的非易失记录介质等来实现。一个方式涉及的程序是用于使一个以上的处理器执行上述控制方法的程序。
59.此外,如图1、图2所示,移动体系统10具备移动体1和控制部51。移动体1具有多个传感器4和多个驱动轮2。控制部51对多个驱动轮2进行控制,使移动体1在移动面b1上移动。从多个传感器4中选择的第1传感器在第1探测范围和轨道l1重叠时,对第1探测范围内的轨道l1的位置进行探测。轨道l1为了引导移动体1而设置于移动面b1。从多个传感器4中选择的与第1传感器不同的第2传感器在第2探测范围和轨道l1重叠时,对第2探测范围内的轨道l1的位置进行探测。从多个传感器4中选择的与第2传感器不同的第3传感器在第3探测范围和轨道l1重叠时,对第3探测范围内的轨道l1的位置进行探测。控制部51执行上述的第1回旋步骤和第2回旋步骤。
60.根据本实施方式的移动体系统10,能够使移动体1相对于轨道l1的位置调整的精度提高。
61.如图2所示,移动体系统10被用于部件安装系统90。即,部件安装系统90具备移动体系统10。此外,部件安装系统90还具备至少一个(在图2中为一个)部件安装设备9。部件安装设备9将部件安装于基板。部件安装设备9具有部件供给装置f1和安装主体8。部件供给装置f1供给部件。安装主体8包含将从部件供给装置f1供给的部件安装于基板的安装头。通过移动体系统10的移动体1沿着轨道l1移动,从而部件供给装置f1被搬送至安装主体8。
62.通过在部件安装系统90中采用移动体系统10,从而移动体1容易将部件供给装置f1搬送至安装主体8。
63.(详细)
64.(1)整体结构
65.以下,参照图1以及图2对本实施方式涉及的控制系统100进行说明。
66.控制系统100除了具备移动体系统10和上级系统7之外,还具备中继装置r1和上述的部件安装设备9。
67.(2)移动体系统
68.(2.1)移动体系统的概要
69.移动体系统10的移动体1在移动面b1上移动,移动体系统10的控制部51对移动体1的移动进行控制。控制部51也可以是移动体1的一部分。或者,也可以是,构成移动体1的装置和构成控制部51的装置单独地存在,两者相互通信从而移动体1的移动被控制部51控制。在本实施方式中,控制部51为移动体1的一部分。即,在移动体1的主体30搭载有控制部51。移动体系统10仅由移动体1构成。移动体1包含搬送物12和搬送装置11。
70.如图2所示,搬送装置11具备主体30和多个(在图2中为两个)驱动轮2。多个驱动轮2保持于主体30。多个驱动轮2包含第1轮21和第2轮22。也就是说,移动体1构成为通过两个驱动轮2而在移动面b1上移动。
71.在此,将第1轮21和第2轮22排列的方向规定为移动体1的左右方向。此外,将从第1轮21观察时第2轮22所在的一侧规定为“右”。将从第2轮22观察时第1轮21所在的一侧规定为“左”。此外,将重力的方向规定为“下方向”(下),将与重力相反的方向规定为“上方向”(上)。此外,将与左右方向以及上下方向正交的方向规定为“前后方向”。图2等中的十字箭头表示移动体1的“前”、“后”、“左”以及“右”。图2等中的这些箭头只不过为了说明而进行表记,不伴有实体。
72.此外,在图2等中,多个驱动轮2用实线进行了绘制,但实际上,多个驱动轮2被主体30遮挡。进而,在图2等中,轨道l1用实线进行了绘制,但实际上,轨道l1中的与移动体1重叠的地方被移动体1遮挡。
73.搬送物12具有搬送物主体120和多个(在图2中为4个)车轮121。多个车轮121保持于搬送物主体120。多个车轮121为从动轮。
74.此外,搬送物12优选具有传感器122。传感器122是与搭载于主体30的4个传感器4分开设置的传感器。传感器122保持于搬送物主体120。
75.搬送物主体120保持于主体30。主体30具有连结搬送物12的连结部301。连结部301设置在主体30中的与前后方向正交的面。连结部301例如为钩子等,是能够钩挂搬送物12的一部分的结构。搬送物12设置在搬送装置11的后方。
76.搬送装置11是用于对搬送物12进行搬送的无人搬送车,保持搬送物12而自主行驶至目的地。在本实施方式中,上级系统7经由网络nt1以及中继装置r1而与搬送装置11进行通信,间接地控制搬送装置11的移动。搬送装置11例如能够通过对放置于某个场所的搬送物12进行拖拽、或者搭载移动、或者推动,从而将其搬送到其他场所。
77.在搬送物12固定有部件供给装置f1。搬送物12是用于将部件供给装置f1搬送至目的地的台车。另外,搬送物12和部件供给装置f1既可以是以能够分离的方式被固定,也可以是以不能分离的方式被固定。
78.搬送装置11除了具备主体30和多个驱动轮2之外,如图1所示,还具备多个(在图1中为4个)传感器4、控制部51、左驱动轮单元52、右驱动轮单元53、第1通信部54、物体探测部55、第1存储部56和电源57。
79.(2.2)传感器
80.各传感器4对轨道l1进行探测。本公开中提及的“轨道”规定了移动体1移动至目的地时的移动体1的移动路径。在本实施方式中,轨道l1设置于移动体1移动的移动面b1。具体地,轨道l1是设置于移动面b1的磁带或者磁性标记等线状物体。移动体系统10基于搭载于移动体1的多个传感器4对轨道l1的探测结果,控制移动体1以使移动体1追踪轨道l1。由此,移动体1能够边追踪轨道l1边移动至目的地。另外,所谓“追踪轨道”,除了移动体1在轨道l1上移动之外,还可以包含移动体1以不与轨道l1重叠的方式沿着轨道l1移动的情况。
81.以下,有时区分4个传感器4而分别称为传感器41、42、43、44。
82.各传感器4例如为磁传感器。各传感器4的形状为棒状。各传感器4通过探测从轨道l1产生的磁通,由此获取传感器4和轨道l1的相对的位置关系,即,与传感器4相对于轨道l1的位置偏移有关的信息。在此提及的“位置偏移”作为一例,由传感器4的中心与轨道l1之间的最短距离来表示。
83.各传感器4例如包含将多个元件排列为一列的阵列。各元件探测磁通,控制部51对探测结果进行处理,从而可确定传感器4和轨道l1的相对的位置关系(位置偏移)。具体地,控制部51在传感器4的探测范围和轨道l1重叠时,对传感器4的探测范围内的轨道l1的位置进行确定。也就是说,传感器4探测传感器4的探测范围和轨道l1是否重叠,以及在重叠的情况下探测在探测范围内的哪个位置重叠。在本实施方式中,从上观察,传感器4的探测范围相当于传感器4的比外缘更靠内侧的区域。换言之,从上观察,传感器4的探测范围与传感器4的比外缘更靠内侧的区域大体一致。另外,设置于搬送物12的传感器122也具有与传感器4同样的功能。
84.传感器41、42在左右方向上具有长度。传感器43、44在前后方向上具有长度。
85.传感器41设置在主体30的前端。传感器42设置在主体30的后端。传感器42设置在传感器41的后方。传感器43、44设置在第1轮21与第2轮22之间。传感器43设置在主体30的中心与第1轮21之间。传感器44设置在主体30的中心与第2轮22之间。
86.(2.3)控制部
87.控制部51包含具有一个以上的处理器以及存储器的计算机系统。一个以上的处理器通过执行存储器中记录的程序,从而实现控制部51的功能。程序既可以预先记录于存储器,也可以通过因特网等电通信线路来提供,还可以记录于存储卡等非易失记录介质来提供。
88.如图1所示,控制部51具有行驶控制部511、区域设定部512和位置计算部513。另外,它们只不过表示由控制部51实现的功能,并非表示必定有实体的结构。
89.行驶控制部511对多个驱动轮2的移动进行控制。更详细地,行驶控制部511通过控制左驱动轮单元52以及右驱动轮单元53,由此控制多个驱动轮2的移动。
90.区域设定部512决定后述的物体探测区域a1(参照图10)的边界线。
91.位置计算部513基于多个传感器4的探测结果来确定传感器4的探测范围内的轨道l1的位置。
92.(2.4)左驱动轮单元以及右驱动轮单元
93.左驱动轮单元52是对第1轮21的旋转和舵角进行控制的控制单元。左驱动轮单元52具有使第1轮21旋转的驱动马达521、和使第1轮21的朝向(转动方向)变化的转向马达522。左驱动轮单元52接受来自行驶控制部511的控制命令。于是,转向马达522使第1轮21变
化为由控制命令指示的朝向,驱动马达521使第1轮21以由控制命令指示的旋转转矩进行旋转。此外,左驱动轮单元52接受来自行驶控制部511的控制命令,将第1轮21的旋转速度控制在从行驶控制部511指示的上限值以下。
94.本公开中提及的“舵角”是指,在从上方观察移动体1的俯视下移动体1的前后方向和驱动轮2的转动方向所成的角度。各驱动轮2的舵角能够从-180度变化到180度。
95.右驱动轮单元53是对第2轮22的旋转和舵角进行控制的控制单元。右驱动轮单元53具有使第2轮22旋转的驱动马达531、和使第2轮22的朝向(转动方向)变化的转向马达532。右驱动轮单元53接受来自行驶控制部511的控制命令。于是,转向马达532使第2轮22变化为由控制命令指示的朝向,驱动马达531使第2轮22以由控制命令指示的旋转转矩进行旋转。此外,右驱动轮单元53接受来自行驶控制部511的控制命令,将第2轮22的旋转速度控制在从行驶控制部511指示的上限值以下。
96.(2.5)第1通信部
97.第1通信部54能够与上级系统7(上级系统7的第2通信部72)进行通信。所谓本公开中的“能够通信”,意味着能够通过有线通信或者无线通信的适当的通信方式直接地或者经由网络nt1或中继装置r1等间接地收发信息。在本实施方式中,第1通信部54在与中继装置r1之间通过无线通信方式进行通信,经由网络nt1而与上级系统7进行通信。
98.(2.6)物体探测部
99.物体探测部55对设置在移动体1的周围的物体探测区域a1(参照图10)中的物体的存在与否进行检测。物体探测部55例如包含图像传感器(摄像机)、声纳传感器、雷达以及lidar(light detection and ranging,光探测和测距仪)等传感器,通过这些传感器来检测物体探测区域a1中的物体的存在与否。
100.此外,搬送装置11具备行驶探测部550。在本实施方式中,行驶探测部550兼用作物体探测部55。行驶探测部550求出主体30的当前位置以及周边状况。行驶探测部550例如基于利用lidar对周围的物体的探测信息、和移动体1行驶的区块的电子的地图信息来求出当前位置。另外,行驶探测部550也可以利用使用了电波信标的lps(local positioning system,局域定位系统)来求出当前位置。或者,行驶探测部550也可以利用gps(global positioning system,全球定位系统)等卫星定位系统来求出当前位置。
101.此外,行驶探测部550也可以探测移动体1的动作状态等。移动体1的动作状态可以包含移动体1所具有的电源57的电池余量、表示移动体1是行驶中还是停止中的状态、移动体1的速度(以及速度变化)、移动体1的加速度以及移动体1的姿势等。行驶探测部550例如包含速度传感器、加速度传感器、陀螺仪传感器等传感器,通过这些传感器来探测移动体1的动作状态。
102.移动体1不仅能够追踪轨道l1并在其上进行移动,还能够参照当前位置的信息以及动作状态等而偏离轨道l1地进行移动。
103.(2.7)第1存储部
104.第1存储部56例如包含非易失性存储器等半导体存储器。第1存储部56存储设定于移动体1的周围的物体探测区域a1的设定信息等。另外,在本实施方式中,区域设定部512根据移动体1的行驶状态而使物体探测区域a1的形状以及大小中的至少一者变化。第1存储部56存储了表示范围彼此不同的多个区域候选的多个区域数据。区域数据例如由在xy坐标平
面上表示区域候选的范围的坐标数据等构成,该xy坐标平面以移动体1的主体30的中心位置为原点,并且与上下方向正交。多个区域候选的区域数据既可以预先存储于第1存储部56,也可以将从上级系统7接收到的多个区域候选的区域数据存储于第1存储部56。
105.(2.8)电源
106.电源57例如为蓄电池。移动体1利用蓄电池中蓄积的电能来动作。
107.(3)上级系统
108.移动体1能够与上级系统7进行通信。在本实施方式中,上级系统7和移动体1能够在双向上通信。即,能够实现从上级系统7向移动体1的信息的发送、以及从移动体1向上级系统7的信息的发送这两方。
109.在设施中,移动体系统10可能存在多个。即,在设施中,移动体1可以存在多个。上级系统7是用于综合地控制多个移动体1的系统,例如由服务器装置实现。上级系统7对多个移动体系统10分别作出指示,从而间接地控制多个移动体1。
110.上级系统7具有处理部71、第2通信部72和第2存储部73。
111.处理部71包含具有一个以上的处理器以及存储器的计算机系统。一个以上的处理器通过执行存储器中记录的程序,从而实现处理部71的功能。程序既可以预先记录于存储器,也可以通过因特网等电通信线路来提供,还可以记录于存储卡等非易失记录介质来提供。
112.处理部71构成为进行上级系统7的整体控制。此外,处理部71从第2通信部72向控制对象的移动体1发送指示搬送物12的搬送的搬送指示。
113.第2通信部72经由网络nt1以及中继装置r1而与移动体1(移动体1的第1通信部54)进行通信。
114.第2存储部73存储了移动体1移动的给定区块的电子的地图信息等。此外,第2存储部73还存储了表示物体探测区域a1(参照图10)的区域数据。
115.(4)部件供给装置
116.在图2中,部件供给装置f1(进给器)用于向设置在工厂内的安装主体8供给部件。在本实施方式中,搬送装置11接受来自上级系统7的指示,使放置到给定区块内的某个场所的搬送物12与搭载于搬送物12的部件供给装置f1一起移动。由此,部件供给装置f1被移动至安装主体8。更详细地,部件供给装置f1被移动到设置在安装主体8的侧面的凹处81内。若部件供给装置f1被移动到凹处81内,则在设置于安装主体8的第1连接器会连接搬送物12的第2连接器,从而安装主体8和搬送物12成为相互连接的状态。然后,能够在安装主体8和搬送物12相互连接的状态下从部件供给装置f1向安装主体8供给部件。
117.(5)第1动作例
118.下面,参照图3~图9对移动体系统10使搬送物12移动至目的地(凹处81)的第1动作例进行说明。另外,在图4~图9中,省略了搬送物12的图示。图3所示的流程图只不过为本公开涉及的移动体1的控制方法的一例,既可以适当变更处理的顺序,也可以适当追加或者省略处理。
119.轨道l1(磁带等)延长至设置有安装主体8的场所。搬送装置11接受来自上级系统7的指示,保持搬送物12,并与搬送物12一起移动至轨道l1(图3的步骤st1)。即,移动体1移动至轨道l1。移动体1例如利用由行驶探测部550获取到的当前位置的信息以及动作状态的信
息等而移动至轨道l1。在此,设轨道l1为直线状。
120.在第1动作例中,多个传感器4中的哪个传感器分别相当于第1传感器、第2传感器以及第3传感器被预先决定。控制部51将从多个传感器4中选择的一个传感器4作为第1传感器来处理,将与第1传感器不同的一个传感器4作为第2传感器来处理。此外,控制部51将与第2传感器不同的一个传感器4作为第3传感器来处理。在此,控制部51将传感器41兼作为第1传感器和第3传感器来处理,将传感器42作为第2传感器来处理。
121.如图2、图4所示,第2传感器(传感器42)以及第3传感器(传感器41),沿着多个驱动轮2中的给定的两个驱动轮(第1轮21以及第2轮22)的中心轴一致时的移动体1的行进方向(前方向或者后方向)而排列。
122.此外,如图2所示,从多个驱动轮2中的给定的两个驱动轮(第1轮21以及第2轮22)的中心轴一致时的移动体1的行进方向(在图2中为后方向)上的移动体1的前端123观察,在第1传感器(传感器41)和第2传感器(传感器42)之中,第1传感器配置得更远。
123.在步骤st1中移动体1行驶时,若第1传感器探测到轨道l1(步骤st2:是),则控制部51使移动体1的行驶停止。图4表示第1传感器(传感器41)探测到轨道l1且移动体1停止了行驶的状态。在图4中,传感器41探测到在与轨道l1重叠的给定的位置p1存在轨道l1。
124.然后,控制部51计算用于在第1回旋步骤中使移动体1回旋的多个驱动轮2各自的舵角以及行驶速度(步骤st3)。如图5所示,第1轮21的舵角θ1是从上观察时沿着移动体1的前后方向的假想线vl1和第1轮21的转动方向所成的角(在此设为锐角)。第2轮22的舵角是从上观察时沿着移动体1的前后方向的假想线vl2和第2轮22的转动方向所成的角(在此设为锐角)。此外,在以下的说明中,分别利用舵角θ1的余角α1以及舵角的余角β1。
125.转向马达522(参照图1)通过使第1轮21以旋转轴x1为中心进行旋转,由此使第1轮21的转动方向变化。转向马达532(参照图1)通过使第2轮22以旋转轴x2为中心进行旋转,由此使第2轮22的转动方向变化。
126.在第1回旋步骤中,移动体1以传感器41和轨道l1重叠的位置p1为回旋中心进行回旋,使得轨道l1和位置p1的位置关系不变化。为了实现这样的第1回旋步骤,决定舵角θ1,使得从上观察时连结位置p1和旋转轴x1的线段与沿着第1轮21的转动方向的轴正交。同样地,为了实现第1回旋步骤,决定舵角使得从上观察时连结位置p1和旋转轴x2的线段与沿着第2轮22的转动方向的轴正交。
127.另一方面,各驱动轮2的行驶速度如下那样决定。控制部51决定各驱动轮2的行驶速度,使得第1轮21的角速度和第2轮22的角速度一致。由此,可取得第1轮21的移动和第2轮22的移动的匹配。更详细地,由此,第1轮21和第2轮22无空转地进行转动。
128.用于使第1轮21的角速度和第2轮22的角速度一致的条件由[数学式1]来表示。
[0129]
[数学式1]
[0130]
va/ra=vb/rb
[0131]
va为转动方向上的第1轮21的速度(行驶速度)。vb为转动方向上的第2轮22的速度(行驶速度)。ra为位置p1与旋转轴x1之间的距离。rb为位置p1与旋转轴x2之间的距离。
[0132]
另一方面,根据图5,[数学式2]成立。
[0133]
[数学式2]
[0134]
ra
×
cosα=rb
×
cosβ
[0135]
在此,α=α1、β=β1。
[0136]
如果根据[数学式1]以及[数学式2]来决定行驶速度va、vb使得满足[数学式3],那么第1轮21的角速度和第2轮22的角速度一致。
[0137]
[数学式3]
[0138]
va
×
cosα=vb
×
cosβ
[0139]
以下,将通过步骤st3求出的行驶速度va、vb分别表记为va1、vb1。
[0140]
另外,决定行驶速度va1、vb1的正负,使得以位置p1为中心的角动量的朝向一致。即,决定行驶速度va1、vb1的正负,使得从上观察时行驶速度val、vb1均有助于按顺时针方向或者按逆时针方向的移动体1的旋转。
[0141]
控制部51在决定了舵角θ1、和行驶速度va1、vb1之后,开始第1回旋步骤(步骤st4)。首先,控制部51通过向转向马达522、532输出控制命令从而使第1轮21以及第2轮22的转动方向变化,以便实现舵角θ1、(参照图5)。然后,控制部51直至传感器42探测到在传感器42(第2传感器)的第2探测范围内的第1目标位置t1有轨道l1的状态为止,使第1轮21以行驶速度va1进行行驶,同时使第2轮22以行驶速度vb1进行行驶。在此,第1目标位置t1被预先设定,并存储于第1存储部56。在本实施方式中,第1目标位置t1为传感器42的中心的位置。第1目标位置t1不是设置于移动面b1的绝对的位置,而是设定于与移动体1一起旋转以及移动的坐标轴上的位置。
[0142]
若传感器42探测到在第1目标位置t1有轨道l1的状态(步骤st5:是),则控制部51使移动体1的行驶停止。图6表示传感器42探测到在第1目标位置t1有轨道l1的状态且移动体1停止了行驶的状态。
[0143]
然后,控制部51计算用于在第2回旋步骤中使移动体1回旋的多个驱动轮2各自的舵角以及行驶速度(步骤st6)。也就是说,控制部51重新决定舵角以及行驶速度。以下,将通过步骤st6求出的舵角以及行驶速度分别表记为θ2、va2、vb2。
[0144]
在第2回旋步骤中,移动体1以第1目标位置t1为回旋中心进行回旋,使得轨道l1和第1目标位置t1的位置关系不变化。为了实现这样的第2回旋步骤,如图7所示,决定新的舵角θ2(以及余角α2),使得从上观察时连结第1目标位置t1和旋转轴x1的线段与沿着第1轮21的转动方向的轴正交。同样地,为了实现第2回旋步骤,决定新的舵角(以及余角β2),使得从上观察时连结第1目标位置t1和旋转轴x2的线段与沿着第2轮22的转动方向的轴正交。
[0145]
另一方面,各驱动轮2的行驶速度va2、vb2由[数学式3]来决定。在此,va=va2、vb=vb2、α=α2、β=β2。此外,决定行驶速度va2、vb2的正负,使得以第1目标位置t1为中心的角动量的朝向一致。
[0146]
控制部51在决定了舵角θ2、和行驶速度va2、vb2之后,开始第2回旋步骤(步骤st7)。首先,控制部51通过向转向马达522、532输出控制命令从而使第1轮21以及第2轮22的转动方向变化,以便实现舵角θ2、(参照图7)。然后,控制部51直至传感器41探测到在传感器41(第3传感器)的第3探测范围内的第2目标位置t2有轨道l1的状态为止,使第1轮21以行驶速度va2进行行驶,同时使第2轮22以行驶速度vb2进行行驶。在此,第2目标位置t2被预
先设定,并存储于第1存储部56。在本实施方式中,第2目标位置t2为传感器41的中心的位置。第2目标位置t2不是设定于移动面b1的绝对的位置,而是设定于与移动体1一起旋转以及移动的坐标轴上的位置。
[0147]
若传感器41探测到在第2目标位置t2有轨道l1的状态(步骤st8:是),则控制部51使移动体1的行驶停止。图8表示传感器41探测到在第2目标位置t2有轨道l1的状态且移动体1停止了行驶的状态。
[0148]
在第2回旋步骤结束时,第1目标位置t1和第2目标位置t2位于轨道l1上。在本实施方式中,第1目标位置t1和第2目标位置t2在前后方向上排列。因而,在第2回旋步骤结束时,移动体1的朝向成为如移动体1的前后方向与直线状的轨道l1的长度方向一致的朝向。
[0149]
在第2回旋步骤之后,控制部51执行方向转换步骤(步骤st9)。方向转换步骤是如下步骤,即,使多个驱动轮2在原地改变转动方向,使得多个驱动轮2各自的转动方向成为期望的方向。期望的方向能够针对每个驱动轮2而不同。控制部51向转向马达522(参照图1)输出控制命令,由此第1轮21以旋转轴x1为中心进行旋转,第1轮21的转动方向d1变化。同样地,控制部51向转向马达532(参照图1)输出控制命令,由此第2轮22以旋转轴x2为中心进行旋转,第2轮22的转动方向d2变化。
[0150]
图9表示执行了方向转换步骤之后的移动体1。在本实施方式中,在方向转换步骤中,期望的方向是如多个驱动轮2各自的转动方向沿着轨道l1的方向。更详细地,期望的方向是如多个驱动轮2各自的转动方向与轨道l1平行的方向。在本公开中,所谓“平行”,是不仅包含完全平行还包含大致平行的概念。例如,即使从平行状态稍微(几度的程度)偏离,也称为“平行”。
[0151]
在本实施方式中,通过回旋动作而多个驱动轮2的转动方向相对于前后方向变得倾斜(参照图8),从该状态起,通过方向转换步骤在多个驱动轮2的转动方向沿着前后方向的方向上进行方向转换(参照图9)。因而,与多个驱动轮2的转动方向从和左右方向平行的方向朝沿着前后方向的方向进行方向转换的情况相比较,方向转换中的多个驱动轮2的角度变化(以沿着上下方向的旋转轴x1、x2为中心的旋转的旋转角的变化)小。上述角度变化小,从而能够降低在方向转换中多个驱动轮2打滑的可能性,即便打滑了,也能够减小打滑量。因而,能够降低移动体1相对于轨道l1发生位置偏移的可能性,即便发生了位置偏移,也能够减小位置偏移的程度。
[0152]
在方向转换步骤之后,移动体1沿着轨道l1进行移动(步骤s t10)。在本实施方式中,移动体1沿着轨道l1进行后退。在此,在轨道l1的一部分设置了曲线的情况下,移动体1通过多个传感器4来探测曲线。然后,控制部51基于多个传感器4的探测结果来决定多个驱动轮2的舵角以及行驶速度,使移动体1沿着曲线行驶。
[0153]
若移动体1到达目的地(步骤s t11),则控制部51使移动体1的行驶停止。目的地是部件供给装置f1收纳于安装主体8的凹处81内的位置(参照图2)。根据以上,部件供给装置f1成为能够向安装主体8供给部件的状态。
[0154]
另外,控制部51也可以设定第1目标位置t1和第2目标位置t2,使得从上观察时第1目标位置t1和第2目标位置t2在与前后方向交叉的方向上排列。由此,控制部51能够使移动体1回旋,使得从上观察时移动体1的前后方向与轨道l1交叉。
[0155]
移动体1在第1回旋步骤中以第1传感器(传感器41)上的点为回旋中心进行旋转,
在第2回旋步骤中以第2传感器(传感器42)上的点为回旋中心进行旋转。从移动体1的前端123(参照图2)观察,在第1传感器和第2传感器之中,第1传感器配置得更远。远离前端123的第1传感器比第2传感器更先地成为回旋中心,因此能够使移动体1(特别是前端123)相对于轨道l1的位置调整的精度进一步提高。
[0156]
(6)第2动作例
[0157]
下面,参照图10以及图11对移动体系统10使搬送物12移动至目的地的第2动作例进行说明。第2动作例与第1动作例的不同点在于,控制部51基于物体探测部55(参照图1)的探测结果来控制移动体1的行驶状态。
[0158]
移动体1利用物体探测部55对没定在移动体1的周围的物体探测区域a1中的物体的存在与否进行检测。若物体探测部55检测到物体探测区域a1中存在物体,则行驶控制部511(参照图1)控制移动体1,以便避免存在于物体探测区域a1的物体和移动体1的接触。例如,若物体探测部55检测到物体探测区域a1中存在物体,则行驶控制部511使移动体1慢行或者使移动体1停止。或者,若在移动体1回旋中物体探测部55检测到物体探测区域a1中存在物体,则行驶控制部511变更移动体1的回旋方向,以便避开物体。或者,若在移动体1直行中物体探测部55检测到物体探测区域a1中存在物体,则行驶控制部511使移动体1回旋,以便避开物体。
[0159]
物体探测区域a1内的各位置是设定在移动体1上的坐标轴上的位置。因而,若移动体1移动或者旋转,则物体探测区域a1也同样地移动或者旋转。
[0160]
上级系统7(参照图1)的第2存储部73存储了表示物体探测区域a1的区域数据。处理部71基于从第2存储部73获取到的区域数据来决定物体探测区域a1,通过第2通信部72发送对物体探测区域a1进行指定的控制指示。区域设定部512(参照图1)基于来自上级系统7的控制指示来设定(决定)物体探测区域a1的大小以及形状中的至少一者。
[0161]
物体探测区域a1包含:搬送装置区域a10,具有移动体1的搬送装置11的周围的第1缓冲区域;和搬送物区域a20,具有搬送物12的周围的第2缓冲区域。物体探测区域a1设定为从上观察时沿着移动体1的形状的形状。此外,物体探测区域a1可以包含从上观察时与移动体1重叠的区域(移动体1的上方或者下方的区域)。即,搬送装置区域a10可以包含从上观察时与搬送装置11重叠的区域。此外,搬送物区域a20可以包含从上观察时与搬送物12重叠的区域。
[0162]
在移动体1停止时以及移动体1直行时,物体探测区域a1的形状为第1形状。第1形状为图10所示的形状。在物体探测区域a1的形状为第1形状时,从移动体1的左端到物体探测区域a1的左端之间的距离l11与从移动体1的右端到物体探测区域a1的右端之间的距离l12相等。另外,在此,由搬送装置11与物体探测区域a1的边界之间的距离来定义距离l11、l12。在图10中还图示了从搬送物12的左端到物体探测区域a1的左端之间的距离l13、以及从搬送物12的右端到物体探测区域a1的右端之间的距离l14。
[0163]
移动体1在第1回旋步骤以及第2回旋步骤中进行回旋。图10表示在第2回旋步骤中移动体1即将以第1目标位置t1为回旋中心进行回旋之前的状态,图11表示在第2回旋步骤中进行回旋的中途的状态。在图10、图11中,移动体1的前端302与第1目标位置t1之间的距离比移动体1的后端(前端123)与第1目标位置t1之间的距离短。
[0164]
区域设定部512在移动体1回旋时,在移动体1的回旋方向上扩张物体探测区域a1。
也就是说,区域设定部512使移动体1的回旋方向上的物体探测区域a1的长度与刚刚经过的时间点相比更长(扩张)。另外,即使在第1回旋步骤以及第2回旋步骤以外的状况下移动体1回旋时,区域设定部512也可以在移动体1的回旋方向上扩张物体探测区域a1。
[0165]
例如,在移动体1按顺时针回旋时,物体探测区域a1的形状为第2形状。第2形状为图11所示的形状。在物体探测区域a1的形状为第2形状时,从移动体1(搬送装置11)的右端到物体探测区域a1的右端之间的距离l22与第1形状下的距离l12相等。另一方面,在物体探测区域a1的形状为第2形状时,从移动体1(搬送装置11)的左端到物体探测区域a1的左端之间的距离l21比第1形状下的距离l11长。也就是说,区域设定部512在移动体1从此处前进的方向上拓宽物体探测区域a1。
[0166]
此外,例如,在移动体1按逆时针回旋时,物体探测区域a1的形状为第3形状。在物体探测区域a1的形状为第3形状时,从移动体1(搬送装置11)的左端到物体探测区域a1的左端之间的距离与第1形状下的距离l11相等。另一方面,在物体探测区域a1的形状为第3形状时,从移动体1(搬送装置11)的右端到物体探测区域a1的右端之间的距离比第1形状下的距离l12长。也就是说,区域设定部512在移动体1从此处前进的方向上拓宽物体探测区域a1。
[0167]
如在以上的第2动作例中示出的那样,控制部51执行设定步骤和控制步骤。在设定步骤中,在移动体1的周围设定探测物体的范围即物体探测区域a1。在控制步骤中,基于物体探测区域a1中的物体的探测结果来控制移动体1。在设定步骤中,在移动体1回旋时,在移动体1的回旋方向上扩张物体探测区域a1。由此,物体探测部55容易探测到在回旋时有可能与移动体1碰撞的物体。
[0168]
(变形例1)
[0169]
以下,对变形例1涉及的移动体系统10进行说明。关于与实施方式同样的结构,标注同一符号并省略说明。
[0170]
与实施方式同样地,控制部51执行方向转换步骤。方向转换步骤是如下步骤,即,使多个驱动轮2在原地改变转动方向,使得多个驱动轮2各自的转动方向成为期望的方向。
[0171]
在实施方式中,在方向转换步骤中,期望的方向是如多个驱动轮2各自的转动方向沿着轨道l1的方向(参照图9)。与之相对,在本变形例1中,在方向转换步骤中,期望的方向是多个驱动轮2成为前束或者后束的方向。
[0172]
在图12中示出多个驱动轮2为前束的状态。第1轮21的束角τ1是第1轮21的转动方向d1和移动体1的前后方向所成的角。第2轮22的束角τ2是第2轮22的转动方向d2和移动体1的前后方向所成的角。在多个驱动轮2为前束时,束角τ1、τ2例如相互一致,均为10度。此外,在多个驱动轮2为后束时,束角τ1、τ2例如相互一致,均为-10度。
[0173]
根据本变形例1,与束角τ1、τ2为0度的情况相比较,能够谋求移动体1的行驶的稳定性的提高。
[0174]
(变形例2)
[0175]
以下,参照图13对变形例2涉及的移动体系统10进行说明。关于与实施方式同样的结构,标注同一符号并省略说明。
[0176]
另外,在本变形例2中,多个传感器4中的哪个传感器分别相当于第1传感器、第2传感器以及第3传感器不是被预先决定的,而是在第1回旋步骤以及第2回旋步骤执行前或者执行中被决定的。此外,如实施方式那样一个传感器4兼作第1传感器和第3传感器不是必需
的,在本变形例2中,第1传感器和第3传感器有时为不同的传感器4。
[0177]
在图13中,传感器43(第1传感器)探测到在与轨道l1重叠的给定的位置p1存在轨道l1。在本变形例2中,对从该状态起执行第1回旋步骤的例子进行说明。
[0178]
例如,与实施方式同样地,在想要使移动体1回旋以便移动体1的前后方向与直线状的轨道l1的长度方向一致的情况下,只要如下那样进行即可。首先,控制部51在传感器41或者传感器42上设定第1目标位置t1。在本变形例2中,控制部51将传感器42(第2传感器)上的点t2设为第1目标位置t1。然后,在第1回旋步骤中,控制部51使移动体1以位置p1为回旋中心进行回旋,直至传感器42探测到在第1目标位置t1(点t2)有轨道l1的状态为止。这样,通过移动体1回旋,从而移动体1和轨道l1的位置关系变化。即,若以移动体1为基准,则轨道l1的位置成为假想线l2所示的位置。
[0179]
然后,控制部51将传感器41(第3传感器)上的点t1设为第2目标位置t2。之后,在第2回旋步骤中,控制部51使移动体1以第1目标位置t1(点t2)为中心进行回旋,直至传感器41探测到在第2目标位置t2有轨道l1的状态为止。由此,如图8所示,能够使移动体1回旋为移动体1的前后方向与直线状的轨道l1的长度方向一致。
[0180]
作为另一例,在想要使移动体1回旋以便从上观察时移动体1的前后方向与轨道l1交叉(例如,正交)的情况下,只要如下那样进行即可。首先,控制部51将传感器44(第2传感器)上的点t3设为第1目标位置t1。然后,在第1回旋步骤中,控制部51使移动体1以位置p1为回旋中心进行回旋,直至传感器44探测到在第1目标位置t1(点t3)有轨道l1的状态为止。这样,通过移动体1回旋,从而移动体1和轨道l1的位置关系变化。即,若以移动体1为基准,则轨道l1的位置成为假想线l3所示的位置。
[0181]
然后,控制部51将传感器43(第3传感器)上的点设为第2目标位置t2。之后,在第2回旋步骤中,控制部51使移动体1以第1目标位置t1(点t3)为中心进行回旋,直至传感器43探测到在第2目标位置t2有轨道l1的状态为止。由此,能够使移动体1回旋为从上观察时移动体1的前后方向与轨道l1交叉(例如,正交)。
[0182]
(变形例3)
[0183]
以下,参照图14对变形例3涉及的移动体系统10进行说明。关于与实施方式同样的结构,标注同一符号并省略说明。
[0184]
在本变形例3中,移动体1回旋时的物体探测区域a1的扩张方法与实施方式不同。物体探测区域a1包含:搬送装置区域a10,具有搬送装置11的周围的第1缓冲区域;和搬送物区域a20,具有搬送物12的周围的第2缓冲区域。在移动体1回旋时,控制部51的区域设定部512在搬送装置11的回旋方向(前进的方向)上扩张搬送装置区域a10。此外,在移动体1回旋时,区域设定部512在搬送物12的回旋方向(前进的方向)上扩张搬送物区域a20。
[0185]
例如,在移动体1停止时以及移动体1直行时,物体探测区域a1的形状为图10所示的形状。图10表示在第2回旋步骤中移动体1即将以第1目标位置t1为回旋中心进行回旋之前的状态,图14表示在第2回旋步骤中移动体1按顺时针方向回旋的中途的状态。在移动体1以第1目标位置t1为回旋中心按顺时针方向回旋时,搬送装置11向右前进,搬送物12向左前进。
[0186]
例如,在移动体1按顺时针方向回旋时,由区域设定部512设定的物体探测区域a1的形状为第4形状。第4形状为图14所示的形状。在物体探测区域a1的形状为第4形状时,从
搬送装置11的左端到搬送装置区域a10的左端之间的距离l31与第1形状下的距离l11相等。另一方面,从搬送装置11的右端到搬送装置区域a10的右端之间的距离l32比第1形状下的距离l12长。
[0187]
此外,在物体探测区域a1的形状为第4形状时,从搬送物12的左端到搬送物区域a20的左端之间的距离l33比第1形状下的距离l13长。另一方面,从搬送物12的右端到搬送物区域a20的右端之间的距离l34与第1形状下的距离l14相等。
[0188]
此外,例如,在移动体1按逆时针方向回旋时,区域设定部512只要在与移动体1按顺时针方向回旋时相反的朝向上分别扩张搬送装置区域a10以及搬送物区域a20即可。
[0189]
在本变形例3中,区域设定部512在搬送装置11前进的方向上扩张搬送装置区域a10,在搬送物12前进的方向上扩张搬送物区域a20,因此与实施方式相比较,容易探测到有可能与移动体1碰撞的物体。
[0190]
(实施方式的其他变形例)
[0191]
以下,列举实施方式的其他变形例。以下的变形例也可以适当组合来实现。此外,以下的变形例也可以与上述的各变形例适当组合来实现。
[0192]
也可以将部件供给装置f1视作搬送物12的一部分。
[0193]
搬送装置11不限定为相对于搬送物12而在前后方向上排列的结构。搬送装置11也可以是相对于搬送物12而在上下方向或者左右方向上排列的结构。
[0194]
驱动轮2的个数并不限定于两个,也可以为3个以上。此外,多个驱动轮2中的至少一个驱动轮2也可以具备在搬送物12中。控制部51也可以通过控制搬送物12的驱动轮从而执行第1回旋步骤以及第2回旋步骤。
[0195]
搬送物12的传感器122也可以用作第1传感器、第2传感器或者第3传感器。此外,在搬送物12具有多个传感器122的情况下,搬送装置11也可以不具有传感器4。
[0196]
在仅将搬送装置11的传感器4用作第1传感器、第2传感器或者第3传感器的情况下,由于传感器4远离搬送物12的前端123(后端),因此前端123的位置调整的精度变得比较低。与之相对,通过将搬送物12的传感器122用作第1传感器、第2传感器或者第3传感器,从而能够使搬送物12(特别是其前端123)的位置调整的精度提高。
[0197]
传感器4探测轨道l1的方式不限定于利用了磁的方式。例如,作为传感器4设置的光学传感器也可以通过向作为轨道l1设置的反射带投光,对反射光进行探测,由此探测轨道l1。
[0198]
从上观察,传感器4的探测范围(第1~第3探测范围)也可以不与传感器4重叠。
[0199]
在实施方式中,移动体1所具有的传感器的个数为4个传感器4和传感器122的合计,也就是5个。不过,传感器的个数不限定于5个,只要为2个以上即可。例如,也可以为传感器41和传感器42的合计,也就是2个。
[0200]
移动体系统10也可以在执行了第2回旋步骤之后,执行与第2回旋步骤同样的进一步的回旋步骤来回旋。
[0201]
物体探测区域a1也可以不包含具有搬送装置11的周围的第1缓冲区域的搬送装置区域a10、和具有搬送物12的周围的第2缓冲区域的搬送物区域a20中的一者。
[0202]
物体探测区域a1的形状不限定于如图10、图11所示那样的从上观察时为6边形的形状,能够适当变更。例如,物体探测区域a1的形状也可以为圆状或者椭圆状。
[0203]
前后、左右方向上的物体探测区域a1的范围也可以按上下方向上的每个高度而不同。也就是说,物体探测区域a1也可以为三维的区域。例如,在搬送物12的高度比搬送装置11的高度高的情况下,物体探测区域a1也可以包含搬送装置11和搬送物12的周围的第1区域、以及设置在搬送物12的周围且位于第1区域上的第2区域。
[0204]
区域设定部512也可以获取与搬送物12的尺寸有关的信息,并根据获取到的信息来变更物体探测区域a1的大小以及形状。
[0205]
区域设定部512也可以根据回旋时的移动体1的速度来变更物体探测区域a1的扩张的程度。例如,也可以是,回旋时的移动体1的速度越快,区域设定部512越增大移动体1的回旋方向上的物体探测区域a1的扩张的程度。
[0206]
区域设定部512也可以在与移动体1的回旋方向相反的方向上缩小物体探测区域a1。
[0207]
区域设定部512也可以在移动体1按顺时针方向或者按逆时针方向回旋时,在左右两方扩张物体探测区域a1。
[0208]
区域设定部512也可以根据移动体1被使用的状况还变更物体探测区域a1的大小以及形状。例如,当移动体1在窄的通路移动的情况下,有可能是处于通路的端部的墙壁等物体进入到物体探测区域a1内并被探测到而移动体1慢行或者停止。因而,与移动体1在宽的通路移动的情况相比,优选缩窄物体探测区域a1。此外,为了对移动体1所内置的蓄电器进行充电而与充电器连接,或者在与其他移动体之间交接搬送物12的情况下,由于需要靠近充电器或者其他移动体,因此优选缩窄物体探测区域a1。
[0209]
本公开中的移动体系统10包含计算机系统。计算机系统将作为硬件的处理器以及存储器设为主要结构。处理器通过执行计算机系统的存储器中记录的程序,从而可实现作为本公开中的移动体系统10的功能的一部分。程序既可以预先记录于计算机系统的存储器,也可以通过电通信线路来提供,还可以记录于计算机系统可读取的存储卡、光盘、硬盘驱动器等非易失性记录介质来提供。计算机系统的处理器由包含半导体集成电路(ic)或者大规模集成电路(lsi)的一个或多个电子电路构成。这里提及的ic或者lsi等集成电路根据集成的程度而称呼方式不同,包含被称为系统lsi、vlsi(very large scale integration,超大规模集成电路)、或者ulsi(ultra large scale integration,特大规模集成电路)的集成电路。进而,关于在lsi制造后可编程的fpga(field-programmable gate array,现场可编程门阵列)、或者能够实现lsi内部的接合关系的重构或lsi内部的电路划分的重构的逻辑器件,也能够作为处理器来采用。多个电子电路既可以汇集于一个芯片,也可以分散设置于多个芯片。多个芯片既可以汇集于一个装置,也可以分散配置于多个装置。这里提及的计算机系统包含具有一个以上的处理器以及一个以上的存储器的微型控制器。因此,关于微型控制器,也由包含半导体集成电路或者大规模集成电路的一个或多个电子电路构成。
[0210]
此外,移动体系统10中的多个功能汇集于一个装置并不是移动体系统10所必需的结构,移动体系统10的构成要素也可以分散设置于多个装置。例如,控制部51的一部分的功能也可以由上级系统7来实现。此外,移动体系统10的至少一部分的功能,例如,控制部51的一部分的功能也可以由云(云计算机)等来实现。
[0211]
反之,在实施方式中,分散于多个装置的多个功能也可以汇集于一个装置。例如,分散于上级系统7和移动体系统10的多个功能也可以汇集于一个装置。
[0212]
(总结)
[0213]
通过以上说明的实施方式等公开了以下的方式。
[0214]
第1方式涉及的控制方法是在移动面(b1)上移动的移动体(1)的控制方法。移动体(1)具有多个传感器(4、122)和多个驱动轮(2)。从多个传感器(4、122)中选择的第1传感器在第1探测范围和轨道(l1)重叠是,对第1探测范围内的轨道(l1)的位置进行探测。轨道(l1)为了引导移动体(1)而设置于移动面(b1)。从多个传感器(4、122)中选择的与第1传感器不同的第2传感器在第2探测范围和轨道(l1)重叠时,对第2探测范围内的轨道(l1)的位置进行探测。从多个传感器(4、122)中选择的与第2传感器不同的第3传感器在第3探测范围和轨道(l1)重叠时,对第3探测范围内的轨道(l1)的位置进行探测。控制方法具有第1回旋步骤和第2回旋步骤。第1回旋步骤是如下步骤,即,从第1探测范围和轨道(l1)重叠的状态起,直至第2传感器探测到在第2探测范围内的第1目标位置(t1)有轨道(l1)的状态为止,控制多个驱动轮(2),使得移动体(1)以第1探测范围中的与轨道(l1)重叠的位置(p1)为回旋中心进行回旋。第2回旋步骤是如下步骤,即,在第1回旋步骤之后,直至第3传感器探测到在第3探测范围内的第2目标位置(t2)有轨道(l1)的状态为止,控制多个驱动轮(2),使得移动体(1)以第1目标位置(t1)为回旋中心进行回旋。
[0215]
根据上述的结构,在第1回旋步骤中调整移动体(1)的位置,然后,在第2回旋步骤中,微调整移动体(1)的位置。因而,与仅通过一次回旋来调整移动体(1)的位置的情况相比较,能够使相对于轨道(l1)的位置调整的精度提高。
[0216]
此外,第2方式涉及的控制方法在第1方式中还具有方向转换步骤。方向转换步骤是如下步骤,即,在第2回旋步骤之后,使多个驱动轮(2)在原地改变转动方向(d1、d2),使得多个驱动轮(2)各自的转动方向(d1、d2)成为期望的方向。
[0217]
根据上述的结构,能够使移动体(1)从轨道(l1)朝任意的方向移动。
[0218]
此外,在第3方式涉及的控制方法中,在第2方式中,在方向转换步骤中,期望的方向是如多个驱动轮(2)各自的转动方向(d1、d2)沿着轨道(l1)的方向。
[0219]
根据上述的结构,在移动体(1)回旋之后,多个驱动轮(2)沿着轨道(l1)被进行方向转换,因此与从多个驱动轮(2)的转动方向(d1、d2)和轨道(l1)正交的状态起对多个驱动轮(2)进行方向转换的情况相比较,多个驱动轮(2)的角度变化小。因而,能够降低与方向转换相伴的移动体(1)的位置偏移。因而,能够使移动体(1)相对于轨道(l1)的位置调整的精度进一步提高。
[0220]
此外,在第4方式涉及的控制方法中,在第3方式中,在方向转换步骤中,期望的方向是多个驱动轮(2)成为前束或者后束的方向。
[0221]
根据上述的结构,与束角为0度的情况相比较,能够谋求移动体(1)的行驶的稳定性的提高。
[0222]
此外,第5方式涉及的控制方法在第1~4方式中的任一个中,还具有设定步骤和控制步骤。设定步骤是如下步骤,即,在移动体(1)的周围设定探测物体的范围即物体探测区域(a1)。控制步骤是如下步骤,即,基于物体探测区域(a1)中的物体的探测结果来控制移动体(1)。在设定步骤中,在移动体(1)回旋时,在移动体(1)的回旋方向上扩张物体探测区域(a1)。
[0223]
根据上述的结构,容易探测到在回旋时有可能与移动体(1)碰撞的物体。
[0224]
关于第1方式以外的结构,不是控制方法所必需的结构,能够适当省略。
[0225]
此外,第6方式涉及的程序是用于使一个以上的处理器执行第1~5方式中的任一个涉及的控制方法的程序。
[0226]
根据上述的结构,能够使移动体(1)相对于轨道(l1)的位置调整的精度提高。
[0227]
此外,第7方式涉及的移动体系统(10)具备移动体(1)和控制部(51)。移动体(1)具有多个传感器(4、122)和多个驱动轮(2)。控制部(51)对多个驱动轮(2)进行控制,使移动体(1)在移动面(b1)上移动。从多个传感器(4、122)中选择的第1传感器在第1探测范围和轨道(l1)重叠时,对第1探测范围内的轨道(l1)的位置进行探测。轨道(l1)为了引导移动体(1)而设置于移动面(b1)。从多个传感器(4、122)中选择的与第1传感器不同的第2传感器在第2探测范围和轨道(l1)重叠时,对第2探测范围内的轨道(l1)的位置进行探测。从多个传感器(4、122)中选择的与第2传感器不同的第3传感器在第3探测范围和轨道(l1)重叠时,对第3探测范围内的轨道(l1)的位置进行探测。控制部(51)执行第1回旋步骤和第2回旋步骤。第1回旋步骤是如下步骤,即,从第1探测范围和轨道(l1)重叠的状态起,直至第2传感器探测到在第2探测范围内的第1目标位置(t1)有轨道(l1)的状态为止,控制多个驱动轮(2),使得移动体(1)以第1探测范围中的与轨道(l1)重叠的位置(p1)为回旋中心进行回旋。第2回旋步骤是如下步骤,即,在第1回旋步骤之后,直至第3传感器探测到在第3探测范围内的第2目标位置(t2)有轨道(l1)的状态为止,控制多个驱动轮(2),使得移动体(1)以第1目标位置(t1)为回旋中心进行回旋。
[0228]
根据上述的结构,能够使移动体(1)相对于轨道(l1)的位置调整的精度提高。
[0229]
此外,在第8方式涉及的移动体系统(10)中,在第7方式中,移动体(1)具备搬送物(12)和对搬送物(12)进行搬送的搬送装置(11)。搬送物(12)具有多个传感器(4、122)中的至少一个传感器(122)。
[0230]
根据上述的结构,通过搬送物(12)具有传感器(122),从而能够使搬送物(12)的位置调整的精度提高。
[0231]
此外,在第9方式涉及的移动体系统(10)中,在第7或者第8方式中,第2传感器以及第3传感器沿着多个驱动轮(2)中的给定的两个驱动轮(2)的中心轴一致时的移动体(1)的行进方向排列。
[0232]
根据上述的结构,通过执行第1回旋步骤以及第2回旋步骤,从而能够使移动体(1)的朝向为与两个驱动轮(2)的中心轴正交的朝向。
[0233]
此外,在第10方式涉及的移动体系统(10)中,在第9方式中,从多个驱动轮(2)中的给定的两个驱动轮(2)的中心轴一致时的移动体(1)的行进方向上的移动体(1)的前端(123)观察,在第1传感器和第2传感器之中,第1传感器配置得更远。
[0234]
根据上述的结构,在第1回旋步骤和第2回旋步骤之中,在执行后面执行的第2回旋步骤时,行进方向上的移动体(i)的前端(123)的位置的变更变得更小。因而,能够使移动体(1)相对于轨道(l1)的位置调整的精度进一步提高。
[0235]
此外,在第11方式涉及的移动体系统(10)中,在第7~10方式中的任一个中,控制部(51)还执行方向转换步骤。方向转换步骤是如下步骤,即,在第2回旋步骤之后,使多个驱动轮(2)在原地改变转动方向(d1、d2),使得多个驱动轮(2)各自的转动方向(d1、d2)成为期望的方向。
[0236]
根据上述的结构,能够使移动体(1)从轨道(l1)朝任意的方向移动。
[0237]
此外,在第12方式涉及的移动体系统(10)中,在第11方式中,在方向转换步骤中,期望的方向是如多个驱动轮(2)各自的转动方向(d1、d2)沿着轨道(l1)的方向。
[0238]
根据上述的结构,在移动体(1)回旋之后,多个驱动轮(2)沿着轨道(l1)被进行方向转换,因此与从多个驱动轮(2)的转动方向(d1、d2)和轨道(l1)正交的状态起对多个驱动轮(2)进行方向转换的情况相比较,多个驱动轮(2)的角度变化小。因而,能够降低与方向转换相伴的移动体(1)的位置偏移。因而,能够使移动体(1)相对于轨道(l1)的位置调整的精度进一步提高。
[0239]
此外,在第13方式涉及的移动体系统(10)中,在第12方式中,在方向转换步骤中,期望的方向是多个驱动轮(2)成为前束或者后束的方向。
[0240]
根据上述的结构,与束角为0度的情况相比较,能够谋求移动体(1)的行驶的稳定性的提高。
[0241]
此外,在第14方式涉及的移动体系统(10)中,在第7~13方式中的任一个中,控制部(51)还执行设定步骤和控制步骤。设定步骤是如下步骤,即,在移动体(1)的周围设定探测物体的范围即物体探测区域(a1)。控制步骤是如下步骤,即,基于物体探测区域(a1)中的物体的探测结果来控制移动体(1)。在设定步骤中,在移动体(1)回旋时,在移动体(1)的回旋方向上扩张物体探测区域(a1)。
[0242]
根据上述的结构,容易探测到在回旋时有可能与移动体(1)碰撞的物体。
[0243]
此外,在第15方式涉及的移动体系统(10)中,在第14方式中,移动体(1)具备搬送物(12)和对搬送物(12)进行搬送的搬送装置(11)。物体探测区域(a1)包含:搬送装置区域(a10),具有搬送装置(11)的周围的第1缓冲区域;和搬送物区域(a20),具有搬送物(12)的周围的第2缓冲区域。在设定步骤中,在移动体(1)回旋时,控制部(51)在搬送装置(1i)的回旋方向上扩张搬送装置区域(a10),在搬送物(12)的回旋方向上扩张搬送物区域(a20)。
[0244]
根据上述的结构,更容易探测到在回旋时有可能与移动体(1)碰撞的物体。
[0245]
关于第7方式以外的结构,不是移动体系统(10)所必需的结构,能够适当省略。
[0246]
此外,第16方式涉及的部件安装系统具备第7~15方式中的任一个涉及的移动体系统(i0)和至少一个部件安装设备(9)。部件安装设备(9)将部件安装于基板。部件安装设备(9)具有供给部件的部件供给装置(f1)、和包含安装头的安装主体(8)。安装头将从部件供给装置(f1)供给的部件安装于基板。通过移动体系统(10)的移动体(1)沿着轨道(l1)移动,从而部件供给装置(f1)被搬送至安装主体(8)。
[0247]
根据上述的结构,能够使移动体(1)相对于轨道(l1)的位置调整的精度提高。由此,移动体(1)容易将部件供给装置(f1)搬送至安装主体(8)。
[0248]
并不限于上述方式,实施方式涉及的移动体系统(10)的各种结构(包含变形例)能够通过控制方法以及程序来实现。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。