1.本发明涉及雷达装置的反射点滤除方法及雷达装置,例如涉及安装于道路侧的雷达的反射点滤除技术。
背景技术:
2.雷达通过发射天线发射电磁波,经过不同物体反射接收到相应的反射波,对其接收结果进行分析,能有效提取到物体距雷达的位置、运动速度等信息。目前,为了更好地辅助自动驾驶车辆进行各种级别的自动驾驶,通常会在道路侧安装雷达,对驾驶于道路上的各个移动体(车辆)的位置、运动速度、方向角等信息进行检测。然而,雷达在对道路上的各个移动体进行检测时,由于道路上设置的栏杆、墙面等,经常会产生反射点的问题。这些反射点的数据的基本属性与真实移动体的数据的基本属性没有明显差别,因此很难将它们滤除。
技术实现要素:
3.本发明是为了解决上述问题而完成的,其目的在于提供一种雷达装置的反射点滤除方法,该反射点滤除方法能滤除部分因设置于道路上的栏杆、墙面而产生的反射点,提高真实移动体的检测精度,并且本发明还提供了一种能滤除上述反射点的雷达装置。
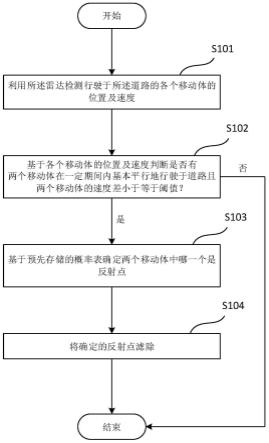
4.根据本发明的一个方面,提供一种雷达装置的反射点滤除方法,其特征在于,包括如下步骤:检测步骤,该检测步骤中利用所述雷达装置检测行驶于道路的各个移动体的位置及速度;反射点存在判断步骤,该反射点存在判断步骤中基于检测出的各个所述移动体的位置及速度判断是否存在反射点,若两个所述移动体在一定期间内基本平行地行驶于所述道路且两个所述移动体的速度差小于等于阈值,则判断为两个所述移动体中存在反射点;反射点确定步骤,该反射点确定步骤中基于预先存储的概率表确定两个所述移动体中哪一个是反射点;以及滤除步骤,该滤除步骤将所述反射点确定步骤中确定的反射点滤除。
5.优选地,所述概率表记录有反射点产生概率,反射点产生概率表示当移动体在某一位置行驶时在另一位置产生反射点的概率。
6.优选地,将所述道路分割成多个路段,所述概率表按多个所述路段来记录所述反射点产生概率。
7.优选地,所述反射点确定步骤中,基于两个所述移动体各自位置选取所述概率表中对应的反射点产生概率,由此确定哪一个是反射点。
8.优选地,所述概率表通过预先在所述道路上进行测试而获得。
9.优选地,所述阈值为1.2m/s。
10.优选地,所述道路为高速道路。
11.根据本发明的另一个方面,提供一种雷达装置,其特征在于,包括:概率表,该概率表记录有道路的各个位置的反射点产生概率;检测单元,该检测单元检测行驶于所述道路的各个移动体的位置及速度;反射点存在判断单元,该反射点存在判断单元基于检测出的
各个所述移动体的位置及速度判断是否存在反射点,若两个所述移动体在一定期间内基本平行地行驶于所述道路且两个所述移动体的速度差小于等于阈值,则判断为两个所述移动体中存在反射点;反射点确定单元,该反射点确定单元中基于所述概率表确定两个所述移动体中哪一个是反射点;以及滤除单元,该滤除单元将所述反射点确定单元中确定的反射点滤除。
附图说明
12.图1是用于说明产生本发明所要滤除的跟随型反射点的场景示意图。
13.图2是表示在图1所示的场景下安装于道路侧的雷达装置所检测到的情况。
14.图3是本发明的一个实施例所涉及的雷达装置的结构框图。
15.图4是用于说明本发明的一个实施例所涉及的雷达装置的反射点滤除方法的流程图。
具体实施方式
16.下面,结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释相关发明,而非对该发明的限定。另外需要说明的是,为了便于描述,附图中仅示出了与有关发明相关的部分。
17.本文所使用的术语仅用于描述特定实施例,且不意欲限制本公开。如本文所使用的,单数形式“一个”和“该”也意欲包括复数形式,除非上下文另外清楚指出。还将理解的是,当本说明书中使用术语“包括”和/或“由
……
制成”时,指定存在所述特征、整体、步骤、操作、元件和/或组件,但不排除存在或添加一个或多个其他特征、整体、步骤、操作、元件、组件和/或其群组。
18.本文所述实施例可借助本公开的理想示意图而参考平面图和/或截面图进行描述。因此,可根据制造技术和/或容限来修改示例图示。因此,实施例不限于附图中所示的实施例,而是包括基于制造工艺而形成的配置的修改。因此,附图中例示的区具有示意性属性,并且图中所示区的形状例示了元件的区的具体形状,但并不旨在是限制性的。
19.除非另外限定,否则本文所用的所有术语(包括技术和科学术语)的含义与本领域普通技术人员通常理解的含义相同。还将理解,诸如那些在常用字典中限定的那些术语应当被解释为具有与其在相关技术以及本公开的背景下的含义一致的含义,且将不解释为具有理想化或过度形式上的含义,除非本文明确如此限定。
20.图1是用于说明产生本发明所要滤除的跟随型反射点的场景示意图。图2是表示在图1所示的场景下安装于道路侧的雷达装置所检测到的情况。
21.如图1、图2所示,当仅在右侧的第一车道1内具有行驶的移动体10时,雷达检测结果显示在应急车道2内有目标(移动体)11出现。该移动体11实际并不存在,是因附近的栏杆而产生的反射点。这种反射点出现时通常表现为和真实移动体10在纵向位置(图1中的x方向)上比较一致,也就是说与真实移动体10基本平行地行驶,并会跟随真实移动体10一段时间。根据这种反射点出现的特征在此将该种情况的反射点定义为跟随型反射点。
22.本发明所涉及的一个实施例所涉及的雷达装置的反射点滤除方法的目的就在于,检测出存在上述跟随型反射点的情况,确定该跟随型反射点并将其滤除。
23.图3是本发明的一个实施例所涉及的雷达装置200的结构框图。
24.本实施例的雷达装置200安装于道路侧,具体而言,本实施例中安装于高速道路上,包括:检测单元210、反射点存在判断单元220、反射点确定单元230、概率表240及滤除单元250。
25.检测单元210基于接收到的雷达信号,检测行驶于该高速道路的各个移动体的位置及速度。在图1、图2所示情况下,检测单元210会识别出移动体10及移动体11这两个目标,并检测出移动体10及移动体11各自的位置及速度。
26.反射点存在判断单元220基于检测单元210检测出的移动体10及移动体11的位置及速度判断是否存在反射点。若移动体10及移动体11在一定期间内基本平行地行驶于高速道路且移动体10及移动体11的速度差小于等于阈值,则判断为移动体10及移动体11中存在反射点。
27.通常,平行行驶的两辆车辆之间的速度差一般大于2.8m/s,因此可以将上述阈值设定为小于2.8m/s的值。经过大量的实验得到,通常反射点与真实车辆的速度差一般不超过1.2m/s,因此更为优选地将上述阈值设定为1.2m/s。
28.在图1、图2所示情况下,移动体11为反射点,因此反射点存在判断单元220能判断出移动体10及移动体11中存在反射点。
29.反射点确定单元230基于概率表240确定移动体10及移动体11中哪一个是反射点。
30.概率表240预先存储于雷达装置200中,其记录有当移动体在某一位置行驶时在另一位置产生反射点的概率。
31.概率表240通过预先在该高速道路上进行大量测试而获得。可以将该高速道路分割成多个路段,按照各个路段来记录数据。例如,将图1所示的路段定义为路段001。表(1)示出了此时的概率表240的一个示例,表(1)所示的概率表240记录有路段001的如下反射点产生概率:(1)、移动体行驶于车道1时在应急车道2内产生反射点的概率;(2)、移动体行驶于应急车道2时在车道1内产生反射点的概率;(3)、移动体行驶于车道3时在应急车道2内产生反射点的概率;(4)、移动体行驶于应急车道2时在车道3内产生反射点的概率;(5)、移动体行驶于车道1时在车道3内产生反射点的概率;以及(6)、移动体行驶于车道3时在车道1内产生反射点的概率。
[0032][0033]
[0034]
表(1)
[0035]
在图1、图2所示情况下,检测单元检测到的移动体10位于路段001的车道1,移动体11位于路段001的应急车道2。因此,反射点确定单元230基于移动体10及移动体11各自的位置、即路段001的车道1及路段001的应急车道2,选取概率表240中对应的反射点产生概率、即表(1)的第一行及第二行的反射点产生概率。选取到的反射点产生概率分别为95%、10%,也就是说移动体10行驶于路段001的车道1时,在路段001的应急车道2(移动体11的位置)处产生反射点的概率为95%,相反,移动体11行驶于路段001的应急车道2时,在路段001的车道1(移动体10的位置)处产生反射点的概率为0%,由此确定路段001的应急车道2的移动体11为反射点。
[0036]
滤除单元250将反射点确定单元240中确定的反射点即移动体11滤除。
[0037]
图4是用于说明本发明的一个实施例所涉及的雷达装置200的反射点滤除方法的流程图。
[0038]
首先,步骤s101中,利用雷达装置200检测行驶于高速道路的各个移动体的位置及速度,本实施例中检测到移动体10及移动体11这两个目标的速度及位置等。
[0039]
接着,在步骤s102中,基于检测出的各个移动体10、11的位置及速度判断是否存在反射点,若移动体10、11在一定期间内基本平行地行驶于该高速道路且移动体10、11的速度差小于等于阈值1.2m/s,则判断为移动体10、11中存在反射点。
[0040]
本实施例为存在反射点的情况,即步骤s102判断为“是”,因此前进至步骤s103。若步骤s102判断为“否”,则结束处理。
[0041]
在步骤s103中,基于预先存储的概率表240确定移动体10、11中哪一个是反射点。具体而言,基于移动体10及移动体11各自的位置、即路段001的车道1及路段001的应急车道2,选取概率表240中对应的反射点产生概率,由此确定路段001的应急车道2的移动体11为反射点,然后前进至步骤s104。
[0042]
步骤s104中,将步骤s103中确定的反射点即移动体11滤除,然后结束处理。
[0043]
如上述说明的那样,根据本发明的实施例,能通过由雷达装置检测到的各个移动体(目标)的位置及速度信息来判断是否在两个移动体中存在反射点,并根据预先存储的概率表来判断两个移动体中哪个是真实移动体哪个是反射点,并将反射点滤除,由此能判断出反射点,并适当地将其滤除,从而提高真实移动体的检测精度。
[0044]
此外,上述实施例中,雷达装置安装于高速道路,但本发明并不限于此,也可以安装于其他道路上。
[0045]
上述实施例中,将高速道路分割成多个路段,并按路段在概率表中记录数据,但本发明并不限于此,也可以采用其他方式。
[0046]
虽然本发明已参照当前的具体实施例来描述,但是本技术领域中的普通技术人员应当认识到,本发明中所涉及的发明范围,并不限于上述技术特征的特定组合而成的技术方案,同时也应涵盖在不脱离所述发明构思的情况下,由上述技术特征或其等同特征进行任意组合而形成的其它技术方案。例如上述特征与本发明中公开的(但不限于)具有类似功能的技术特征进行相互替换而形成的技术方案。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。