技术特征:
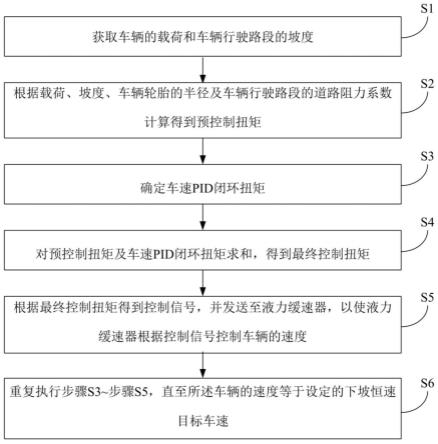
1.一种下坡恒速控制方法,其特征在于,包括:s1、获取车辆的载荷和所述车辆行驶路段的坡度;s2、根据所述载荷、所述坡度、所述车辆轮胎的半径及所述车辆行驶路段的道路阻力系数计算得到预控制扭矩;s3、确定车速pid闭环扭矩;s4、对所述预控制扭矩及所述车速pid闭环扭矩求和,得到最终控制扭矩;s5、根据所述最终控制扭矩得到控制信号,并发送至液力缓速器,以使所述液力缓速器根据所述控制信号控制车辆的速度;s6、重复执行步骤s3~步骤s5,直至所述车辆的速度等于设定的下坡恒速目标车速。2.根据权利要求1所述的下坡恒速控制方法,其特征在于,计算所述预控制扭矩的公式为:t0=(f
载
×
sinα-f
路
×
f
载
×
cosα)
×
r其中,t0表示预控制扭矩;f
载
表示车辆的载荷;α表示车辆行驶路段的坡度;f
路
表示车辆行驶路段的道路阻力系数;r表示车辆轮胎的半径。3.根据权利要求1所述的下坡恒速控制方法,其特征在于,在步骤s1中,实时获取车辆的载荷和所述车辆行驶路段的坡度。4.根据权利要求1所述的下坡恒速控制方法,其特征在于,在步骤s2之前,所述下坡恒速控制方法还包括:判断所述车辆的液力缓速器是否被激活,若是,则执行步骤s2,若否,则激活所述液力缓速器。5.根据权利要求1所述的下坡恒速控制方法,其特征在于,步骤s3包括如下步骤:s31、获取下坡恒速目标车速;s32、获取所述车辆的实际车速;s33、根据所述下坡恒速目标车速与所述车辆的实际车速的差值,通过pid闭环控制方法,计算得到车速pid闭环扭矩。6.一种下坡恒速控制装置,用于执行权利要求1-5任一项所述的下坡恒速控制方法,其特征在于,包括:获取模块,用于获取车辆的载荷和所述车辆行驶路段的坡度;第一处理模块,用于根据所述载荷、所述坡度、所述车辆轮胎的半径及所述车辆行驶路段的道路阻力系数计算得到预控制扭矩;确定模块,用于确定车速pid闭环扭矩;第二处理模块,用于对所述预控制扭矩及车速pid闭环扭矩求和,得到最终控制扭矩;控制模块,用于根据所述最终控制扭矩得到控制信号,并发送至液力缓速器,以使所述液力缓速器根据所述控制信号控制车辆的速度。7.根据权利要求6所述的下坡恒速控制装置,其特征在于,所述获取模块还用于实时获取车辆的载荷和所述车辆行驶路段的坡度。8.根据权利要求6所述的下坡恒速控制装置,其特征在于,所述下坡恒速控制装置为所述车辆的整车控制器。9.根据权利要求6所述的下坡恒速控制装置,其特征在于,所述确定模块包括:
第一获取单元,用于获取下坡恒速目标车速;第二获取单元,用于获取所述车辆的实际车速;确定单元,用于根据所述下坡恒速目标车速与所述车辆的实际车速的差值,通过pid闭环控制方法,计算得到所述车速pid闭环扭矩。10.一种存储介质,其上存储有计算机程序,其特征在于,该程序被行车控制器执行时实现如权利要求1-5中任一项所述的下坡恒速控制方法。
技术总结
本发明公开了一种下坡恒速控制方法、装置及存储介质,其属于车辆控制技术领域,下坡恒速控制方法包括S1、获取车辆的载荷和车辆行驶路段的坡度;S2、根据载荷、坡度、轮胎半径及行驶路段的道路阻力系数得到预控制扭矩;S3、确定车速PID闭环扭矩;S4、对预控制扭矩及车速PID闭环扭矩求和,得到最终控制扭矩;S5、根据最终控制扭矩得到控制信号,并发送至液力缓速器;S6、重复执行步骤S3~步骤S5,直至车辆的速度等于设定的下坡恒速目标车速。本发明能够具有较短的响应时间,进而使得车辆在下坡过程中,车速能够较快地稳定在下坡恒速目标车速,降低出现车速过高的几率,提高了车辆的安全性。性。性。
技术研发人员:张惊寰 张鹏 王明卿 陈首刚 刘丽
受保护的技术使用者:一汽解放汽车有限公司
技术研发日:2022.03.09
技术公布日:2022/6/7
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。