1.本发明涉及半导体引线框加工技术领域,具体涉及一种引线框架生产用剪切装置。
背景技术:
2.随着电子技术的高速发展,产品的更新速度快,多样化的半导体行业,以前切片机切片方法是先放料、整平、气动手指夹片、无杆气缸送片、气动手指夹片、模具切断。生产过程中发现产品质量不稳定,切片单一,操作复杂、生产效率低。
3.在申请号:cn201020659162.3的专利文件中公开了一种引线框架自动切片机,其特征是包括机架、送料机、收纸器、控制器、压力缸、切片模、送片器、整平器、光电感应器;控制器安装在机架的上方,压力缸、送片器、整平器分别由控制器控制,整平器、送片器、切片模依次安装在机架中部的同一水平面上,压力缸与切片模的上模固定连接;送料机由电机驱动,其送料方向的上前方安装有收纸器,送料机与整平器之间待切料移动位置上设置光电感应器,光电感应器的感应信号输出到控制器;机架与送料机安装在同一平台架上。本实用新型切出的产品尺寸准确,更换产品快捷,简化切片工序。解决产品在切片过程中产品位置尺寸不稳定问题,提高了产品质量,减少了因多工序所受造成人力、物力的浪费,提高了生产效率。
4.但是,其在实际应用过程中仍存在以下不足:第一,质量不稳定,因为上述对比文件中的装置只能通过光电传感器检测基带的放料长度来决定切片机是否动作,但是这种方式容易出现测量数据不准的问题,从而造成切割后的引线框架长短不一,同时基带在切片模处并不是完全平直的,而是相对切片模在水平方向存在一定倾斜,这又会使得切割的引线框架出现长短不一的缺陷。
5.第二,效率较低,因为上述对比文件中的装置将引线框架切割下来后,需要人工手动去将引线框架从切片模上取下。
技术实现要素:
6.本发明的目的是为了解决现有技术中存在的缺点,解决上述背景技术中提出的问题。
7.为了实现上述目的,本发明采用了如下技术方案:一种引线框架生产用剪切装置,包括依次设置的送料组件、剪切组件和转运组件;所述剪切组件处还设有采集引线框架空间位置的定位组件和用于固定其上引线框架空间位置的限位组件;所述送料组件、剪切组件、转运组件、定位组件和限位组件均由控制柜控制。
8.更进一步地,所述送料组件包括送料机、收纸辊和放料辊,所述送料机设置在地面上,所述收纸辊和送料辊均设置在送料机的前端,所述放料辊上缠绕有已经刻蚀有引线框架的基带,并且缠绕在所述放料辊上的基带上贴附的保护纸被撕开后缠绕在收纸辊上;
所述剪切组件包括工作台、基座、送片器、整平器、横向行程单元、纵向行程单元、支撑臂、第一电磁旋转座、冲压装置和切割刀,所述工作台设置在送料机在横向上的左端的底面上,所述基座固定在工作台中部的台面上,所述工作台顶部且位于基座左、右两端的台面上均设有送片器,所述工作台右端侧壁的顶部设有整平器,所述横向行程单元设置在工作台后端的地面上,所述纵向行程单元设置在横向行程单元上并由横向行程单元驱动位移,所述支撑臂设置在纵向行程单元上并由纵向行程单元驱动位移,所述支撑臂顶端靠近工作台一端的底部设有第一电磁旋转座,所述冲压装置设置在第一电磁旋转座的底部,所述切割刀设置在冲压装置的底部;所述转运组件包括设置纵向行架、纵向电动推杆、横板、电驱动滑块、升降电动推杆、第二电磁旋转座、水平板、真空吸盘和传送机,所述纵向行架安装在工作台后端的地面上,所述横板滑接在纵向行架上并由设置在纵向行架上的纵向电动推杆驱动位移,所述横板上设有横向的导轨,所述电驱动滑块滑接在横板上的导轨上,所述升降电动推杆设置在电驱动滑块的底部,所述第二电磁旋转座设置在升降电动推杆的底部,所述水平板设置在第二电磁旋转座的底部,所述水平板底部的板面密布有真空吸盘,所述传送机设置工作台的后端且处于纵向行架正下方的地面上。
9.更进一步地,所述放料辊上的基带依次经过整平器和两个送片器并悬空于基座的正上方。
10.更进一步地,所述整平器包括安装在工作台上的转动座和转动连接在转动座上的整平辊;所述送片器包括驱动座、送片辊、齿轮和送片电机,所述驱动座设置在工作台上,所述驱动座上转动连接有两个呈上、下对称关系的送片辊,所述送片辊伸出驱动座的端部均同轴式的固定有齿轮,同一所述驱动座上的两个齿轮啮合并且其中任意一个齿轮与送片电机的电机轴同轴式连接;所述横向行程单元包括横向轨道板、横向滑块、横向螺杆和横向电机,所述横向轨道板的数量至少为两个并且平行式的设置,所述横向轨道板上均滑接有横向滑块,所述横向滑块在横向螺杆和横向电机配合下驱动其位移;所述纵向行程单元包括纵向轨道板、纵向滑块、纵向螺杆和纵向电机,所述横向滑块顶端均固定在纵向轨道板的底部,所述纵向滑块滑接在纵向轨道板上,所述纵向滑块在纵向螺杆和纵向电机配合下驱动其位移,所述支撑臂固定在纵向滑块上。
11.更进一步地,所述基座的尺寸大于基带上引线框架的尺寸。
12.更进一步地,所述第一电磁旋转座和第二电磁旋转的旋转轴均垂直地面,所述冲压装置采用气压驱动方式或液压驱动方式中的任意一种,所述冲压装置上处于切割刀包围的区域内还设有压力平衡孔。
13.更进一步地,所述真空吸盘均由外接的气泵提供动力。
14.更进一步地,所述定位组件包括第一轨道板、第一滑块、第一螺杆、第一电机、吊臂、检测板、定位传感器、摄像模组、光电传感器和压力传感器,所述第一轨道板安装行程方向沿纵向式地设置在工作台前端的地面上,所述第一滑块滑接在第一轨道板上,所述第一滑块在第一螺杆和第一电机配合下驱动其位移,所述吊臂设置在第一滑块上,所述检测板水平式地安装在吊臂靠近工作台一端的下端,所述定位传感器其和摄像模组均设置在检测
板下端的板面上,所述光电传感器设置在放料辊与整平辊之间的底面上,所述压力传感器设置在基座上端面的中部;所述限位组件包括纵向限位座、限位电动杆、纵向下压板和横向拉伸单元,所述纵向限位座的数量有两个,并且每个所述纵向限位座设置在基座与对应送片器之间,所述纵向限位座的两端均设有垂直方向的限位电动推杆,同一所述纵向限位座上两个限位电动推杆的顶端分别固定在同一纵向下压板的两端,所述横向拉伸单元包括角台、角块、导杆、第二螺杆和拉伸电机,所述纵向限位块的两端均设有角块,所述工作台后端的两个角块滑接在同一导杆上,所述工作台前端的两个角块螺接在同一第二螺杆上,所述导杆和第二螺杆的端部均转动连接在工作台上对应的角台上,所述第二螺杆由拉伸电机驱动旋转,所述导杆和第二螺杆的中轴线均沿横向,所述拉伸电机和第二螺杆配合驱动两个纵向限位座做关于基座对称的同步反向运动。
15.更进一步地,所述纵向限位座上端平面不高于基座上端的平面,两个所述送片器之间的基带还穿过纵向限位座和纵向下压板之间的空间;所述工作台左端还设有受控制柜控制的回收组件,所述回收组件包括设置在地面上回收机和设置在回收机前端的回收辊,所述工作台左端的送片器输出基带缠绕在回收辊上。
16.更进一步地,所述控制柜的前端设有触摸显示屏、接口区和按键区。。
17.与现有技术相比,本发明的优点和积极效果在于:1、本发明通过在剪切组件处设有采集引线框架空间位置的定位组件和用于固定其上引线框架空间位置的限位组件的设计。这样控制柜便能够通过限位组件将基座处的基带完全且稳定地贴附在基座的上端面,然后通过检测组件检测基座处于的引线框架相对基座在上端面的位置关系数据,然后控制柜根据检测组件采集到的数据来调整切割刀的刃口边缘在基座上的投影与引线框架边缘在基座上的投影完全重合,从而使得冲压装置驱动切割刀从基带上切割下来的引线框架完全符合预设形状。达到有效地提升本发明产品切割引线框架品质稳定性的效果。
18.2、本发明通过在切割组件处设置转运组件,转运组件包括设置纵向行架、纵向电动推杆、横板、电驱动滑块、升降电动推杆、第二电磁旋转座、水平板、真空吸盘和传送机,纵向行架安装在工作台后端的地面上,横板滑接在纵向行架上并由设置在纵向行架上的纵向电动推杆驱动位移,横板上设有横向的导轨,电驱动滑块滑接在横板上的导轨上,升降电动推杆设置在电驱动滑块的底部,第二电磁旋转座设置在升降电动推杆的底部,水平板设置在第二电磁旋转座的底部,水平板底部的板面密布有真空吸盘,传送机设置工作台的后端且处于纵向行架正下方的地面上,真空吸盘均由外接的气泵提供动力的设计。这样当切割组件完成切割后,控制柜便可以通过上一次检测组件的检测数据来驱动水平板在基座上的投影完全覆盖引线框架在基座上的投影,并通过升降伸缩杆和真空吸盘的配合将基座上切割下来的引线框架取出,并转运至传送机上,然后传送机将引线框架运输至指定的收集点。达到有效地提升本发明产品切割引线框架时生产效率的效果。
附图说明
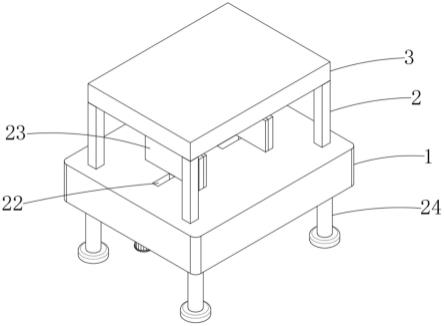
19.图1为本发明第一视角下的直观图;
图2为本发明第二视角下的爆炸视图;图3为本发明第三视角下转运组件的直观图;图4为本发明第四视角下切割组件的直观图;图5为本发明第五视角下工作台处的直观图;图6为本发明第六视角下部分定位组件的直观图;图7为本发明第七视角下部分定位组件的直观图;图中的标号分别代表:100-控制柜;101-触摸显示屏;102-接口区;103-按键区;200-送料组件;201-送料机;202-收纸辊;203-放料辊;300-剪切组件;301-工作台;302-基座;303-送片器;304-整平器;305-横向行程单元;306-纵向行程单元;307-支撑臂;308-第一电磁旋转座;309-冲压装置;310-切割刀;3031-驱动座;3032-送片辊;3033-齿轮;3034-送片电机;3041-转动座;3042-整平辊;3051-横向轨道板;3052-横向滑块;3053-横向螺杆;3054-横向电机;3061-纵向轨道板;3062-纵向滑块;3063-纵向螺杆;3064-纵向电机;3091-压力平衡孔;400-转运组件;401-纵向行架;402-纵向电动推杆;403-横板;404-电驱动滑块;405-升降电动推杆;406-第二电磁旋转座;407-水平板;408-真空吸盘;409-传送机;500-限位组件;501-纵向限位座;502-限位电动杆;503-纵向下压板;504-横向拉伸单元;5041-角台;5042-角块;5043-导杆;5044-第二螺杆;5045-拉伸电机;600-定位组件;601-第一轨道板;602-第一滑块;603-第一螺杆;604-第一电机;605-吊臂;606-检测板;607-定位传感器;608-摄像模组;609-光电传感器;610-压力传感器;700-回收组件;701-回收机;702-回收辊。
具体实施方式
20.为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和实施例对本发明做进一步说明。需要说明的是,在不冲突的情况下,本技术的实施例及实施例中的特征可以相互组合。
21.在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用不同于在此描述的其他方式来实施,因此,本发明并不限于下面公开说明书的具体实施例的限制。
22.本实施例的一种引线框架生产用剪切装置,参照图1-7:包括送料组件200、剪切组件300、转运组件400、定位组件600、限位组件500和回收组件700;并且送料组件200、剪切组件300、转运组件400、回收组件700、定位组件600和限位组件500均由控制柜100控制。
23.(一)控制柜100的前端设有触摸显示屏101、接口区102和按键区103,这样使用者便可以通过触摸显示屏101和按键区103来使用控制柜100并未控制柜100设定指定的工作模式,
从而实现让控制柜100自动控制送料组件200、剪切组件300、转运组件400、定位组件600、限位组件500和回收组件700进行工作的目的;其中,使用者可以通过接口区102向控制柜100进行数据交换或程序写入,从而实现对控制柜100的工作模式根据实际需要进行自定义。
24.(二)送料组件200包括送料机201、收纸辊202和放料辊203,送料机201设置在地面上,收纸辊202和送料辊均设置在送料机201的前端,放料辊203上缠绕有已经刻蚀有引线框架的基带,并且缠绕在放料辊203上的基带上贴附的保护纸被撕开后缠绕在收纸辊202上。
25.值得注意的是:放料辊203和收纸辊202均是可拆卸式地安装在送料机201上并受其驱动旋转。
26.(三)剪切组件300包括工作台301、基座302、送片器303、整平器304、横向行程单元305、纵向行程单元306、支撑臂307、第一电磁旋转座308、冲压装置309和切割刀310,工作台301设置在送料机201在横向上的左端的底面上,基座302固定在工作台301中部的台面上,工作台301顶部且位于基座302左、右两端的台面上均设有送片器303,工作台301右端侧壁的顶部设有整平器304,横向行程单元305设置在工作台301后端的地面上,纵向行程单元306设置在横向行程单元305上并由横向行程单元305驱动位移,支撑臂307设置在纵向行程单元306上并由纵向行程单元306驱动位移,支撑臂307顶端靠近工作台301一端的底部设有第一电磁旋转座308,冲压装置309设置在第一电磁旋转座308的底部,切割刀310设置在冲压装置309的底部。
27.值得注意的是:基座302的平面尺寸大于基带上引线框架的尺寸,且切割刀310的刀口尺寸也小于基座302的平面尺寸,这样可以保证切割刀310在切割引线框架时不会伤及工作台301的台面,同时也保护切割刀310的刀口不受损伤。
28.值得注意的是:切割刀310是可拆卸式的安装在冲压装置309上,这样使用者可以根据不同型号的引线框架更换对应型号的切割刀310,这样可以提升本发明的适用范围。
29.值得注意的是:第一电磁旋转座308的旋转轴垂直地面。
30.值得注意的是:冲压装置309采用气压驱动方式或液压驱动方式中的任意一种,在本实施例中,冲压装置309采用液压动力驱动的方式,因为液压驱动具有功率重量比大、启动和制动迅速、无级调速、调速范围宽、直线运动稳定性好、易于实现过载保护、工作安全和工作平稳等优点。
31.值得注意的是:冲压装置309上处于切割刀310包围的区域内还设有压力平衡孔3091,这样当冲压装置309驱动切割刀310引线框架切割下来后复位过程中,切割刀310与冲压装置309围成的空间中不会产生负压,而使得冲压装置309在向上收缩复位时将引线框架吸起,从而造成引线框架相对基座302的位置发生改变,从而不利于转运组件400的工作。
32.(三-一)送片器303包括驱动座3031、送片辊3032、齿轮3033和送片电机3034,驱动座3031设置在工作台301上,驱动座3031上转动连接有两个呈上、下对称关系的送片辊3032,送片辊3032伸出驱动座3031的端部均同轴式的固定有齿轮3033,同一驱动座3031上的两个齿轮3033啮合并且其中任意一个齿轮3033与送片电机3034的电机轴同轴式连接。
33.值得注意的是:放料辊203上的基带依次经过整平器304和两个送片器303并悬空
于基座302的正上方,这样可以避免基带下端面与基座302之间发生摩擦,从而造成引线框架的下端面因机械磨损而损坏。
34.(三-二)整平器304包括安装在工作台301上的转动座3041和转动连接在转动座3041上的整平辊3042,这样便可以通过整平辊3042将放料辊203输出的基带整平并依次输送至送片器303、基座302和送片器303;同时整平器304也能保证基带不会与工作台301的棱边之间产生机械摩擦而损坏。
35.(三-三)横向行程单元305包括横向轨道板3051、横向滑块3061、横向螺杆3053和横向电机3054,横向轨道板3051的数量为两个并且平行式的设置,横向轨道板3051上均滑接有横向滑块3061,横向滑块3061在横向螺杆3053和横向电机3054配合下驱动其位移。
36.(三-四)纵向行程单元306包括纵向轨道板3061、纵向滑块3062、纵向螺杆3063和纵向电机3064,横向滑块3061顶端均固定在纵向轨道板3061的底部,纵向滑块3062滑接在纵向轨道板3061上,纵向滑块3062在纵向螺杆3063和纵向电机3064配合下驱动其位移,支撑臂307固定在纵向滑块3062上。
37.(四)转运组件400包括设置纵向行架401、纵向电动推杆402、横板403、电驱动滑块404、升降电动推杆405、第二电磁旋转座406、水平板407、真空吸盘408和传送机409,纵向行架401安装在工作台301后端的地面上,横板403滑接在纵向行架401上并由设置在纵向行架401上的纵向电动推杆402驱动位移,横板403上设有横向的导轨,电驱动滑块404滑接在横板403上的导轨上,升降电动推杆405设置在电驱动滑块404的底部,第二电磁旋转座406设置在升降电动推杆405的底部,水平板407设置在第二电磁旋转座406的底部,水平板407底部的板面密布有真空吸盘408,传送机409设置工作台301的后端且处于纵向行架401正下方的地面上。
38.值得注意的是:真空吸盘408均由外接的气泵提供动,这样控制柜100便可以通过控制气泵来让真空吸盘408上产生指定大小的负压,从而将基座302上的引线框架吸附起来,同时控制气泵让真空吸盘408上产生指定大小的正压,从而将水平板407下方的引线框架安全地释放到传送机409上。
39.值得注意的是:第二电磁旋转的旋转轴垂直地面。
40.(五)定位组件600包括第一轨道板601、第一滑块602、第一螺杆603、第一电机604、吊臂605、检测板606、定位传感器607、摄像模组608、光电传感器609和压力传感器610,第一轨道板601安装行程方向沿纵向式地设置在工作台301前端的地面上,第一滑块602滑接在第一轨道板601上,第一滑块602在第一螺杆603和第一电机604配合下驱动其位移,吊臂605设置在第一滑块602上,检测板606水平式地安装在吊臂605靠近工作台301一端的下端,定位传感器607其和摄像模组608均设置在检测板606下端的板面上,光电传感器609设置在放料辊203与整平辊3042之间的底面上,压力传感器610设置在基座302上端面的中部,其中,光电传感器609用于检测放料辊203释放多长的基带,这样控制柜100便可以
通过光电传感器609的监测数据判断基座302处的基带运动了多长距离,从而确定基座302上方的基带上是否有一个完整的引线框架。
41.其中,压力传感器610用于配合限位组件500,控制柜100通过控制限位组件500将基座302处的基带平整且水平式的下压在基座302的上端面,一旦压力传感器610检测信号并且信号达到指定值时,控制柜100便可以判定此时基带是平整且水平式的下压在基座302的上端面。
42.其中,定位传感器607用于检测引线框架在基座302上的位置,然后控制柜100通过摄像模组608拍摄引线框架在基座302上的状态,然后控制柜100根据内置的机器视觉程序来计算引线框架相对基座302在水平面上偏转的幅度,以及确定引线框架在基座302上端面的具体位置。
43.(六)限位组件500包括纵向限位座501、限位电动杆502、纵向下压板503和横向拉伸单元504,纵向限位座501的数量有两个,并且每个纵向限位座501设置在基座302与对应送片器303之间,纵向限位座501的两端均设有垂直方向的限位电动推杆,同一纵向限位座501上两个限位电动推杆的顶端分别固定在同一纵向下压板503的两端,横向拉伸单元504包括角台5041、角块5042、导杆5043、第二螺杆5044和拉伸电机5045,纵向限位块的两端均设有角块5042,工作台301后端的两个角块5042滑接在同一导杆5043上,工作台301前端的两个角块5042螺接在同一第二螺杆5044上,导杆5043和第二螺杆5044的端部均转动连接在工作台301上对应的角台5041上,第二螺杆5044由拉伸电机5045驱动旋转,导杆5043和第二螺杆5044的中轴线均沿横向,拉伸电机5045和第二螺杆5044配合驱动两个纵向限位座501做关于基座302对称的同步反向运动。
44.值得注意的是:纵向限位座501上端平面等于基座302上端的平面,两个送片器303之间的基带还穿过纵向限位座501和纵向下压板503之间的空间。
45.这样控制柜100便可以通过限位电动推杆驱动纵向下压板503将基座302下行,从而与纵向限位座501配合将左、右两端的基带固定住,然后指令拉伸电机5045驱动第二螺杆5044旋转来使得两个纵向限位座501缓慢地向相反方向运动,从而将基座302处的基带拉平直。
46.(七)工作台301左端还设有受控制柜100控制的回收组件700,回收组件700包括设置在地面上回收机701和设置在回收机701前端的回收辊702,工作台301左端的送片器303输出基带缠绕在回收辊702上。
47.这样控制柜100便可以通过回收组件700将废弃的基带进行集中收集,从而有利于节约成本。
48.(八)本发明具体工作时的流程为:第一步,使用者首先将基带从放料辊203上拉出并依次经过整平器304、送片器303、限位组件500、基座302、限位组件500和送片器303并最终缠绕在回收辊702上,同时将基带上的保护纸缠绕在收纸辊202上。
49.第二步,使用者为控制柜100设定指定的工作模式
第三步,控制柜100指令回收辊702、送片器303、放料辊203和收纸辊202启动,从而让基带运动起来。
50.第四步,控制柜100通过光电传感器609检测基带被放料的长度,一旦基带的运动长度达到指定值时(此时基座302正上方的基带上正好有一个完整的引线框架),控制柜100立即指令回收辊702、送片器303、放料辊203和收纸辊202关闭。
51.第五步,控制柜100指令限位电动推杆收缩,从而使得基座302两端的基带被夹紧,然后指令拉伸电机5045启动来驱动两个限位组件500做同步反向(二者背向运动)运动,从而将基座302处的基带拉的平直,此时,基座302的上端面与基带完全贴合。
52.第六步,控制柜100指令第一电机604启动从而将检测板606移动至基座302的正上方,然后控制柜100通过定位传感器607和摄像模组608计算出位置引线框架相对基座302在水平面上偏转的幅度,以及确定引线框架在基座302上端面的具体位置;然后控制柜100指令第一电机604启动从而将检测板606移动至工作台301外。
53.第七步,控制柜100根据第六步的检测数据,指令横向电机3054、纵向电机3064和第一电磁旋转座308,从而使得切割刀310的刃口边缘在基座302上的投影与引线框架边缘在基座302上的投影完全重合,然后控制柜100指令冲压装置309驱动切割刀310向下运动,从而将引线框架从基带上切割下来,然后控制柜100指令横向电机3054、纵向电机3064和第一电磁旋转座308复位(此时冲压装置309外遇工作台301的外端)。
54.第八步,控制柜100根据第六步的检测数据,指令纵向电动推杆402、电驱动块和第二电磁旋转座406启动,从而使得水平板407在基座302上的投影完全覆盖引线框架在基座302上的投影,并通过升降伸缩杆和真空吸盘408的配合将基座302上切割下来的引线框架取出,并转运至传送机409上,然后传送机409将引线框架运输至指定的收集点。
55.第九步,控制柜100指令第一电机604启动,从而使得两个限位组件500做同步反向(二者相向运动)运动,从而将基座302处的基带释放至自然松弛。
56.第十步,控制柜100指令指令限位电动推杆伸长,从而使得基座302两端的基带完全被释放。
57.第十一步,依次重复上述第三步至第十步。
58.以上所述,仅是本发明的较佳实施例而已,并非是对本发明作其它形式的限制,任何熟悉本专业的技术人员可能利用上述揭示的技术内容加以变更或改型为等同变化的等效实施例应用于其它领域,但是凡是未脱离本发明技术方案内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与改型,仍属于本发明技术方案的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。