1.本发明涉及基片交接方法和基片交接装置。
背景技术:
2.在对基片进行处理时,例如作为基片的半导体晶片(下面称为“晶片”)被收纳在密闭型的输送容器中,由外部的输送机构输送至各基片处理装置。在基片处理装置具有用于载置输送容器的装载端口(load port)的情况下,在外部输送机构与装载端口之间进行输送容器的交接。然后,利用设置在基片处理装置中的输送臂,从输送容器中取出晶片并将其送入到基片处理部。
3.专利文献1公开了具有2个装载端口的装载室,其中,2个装载端口用于载置能够收纳多个被处理体的壳体,并且沿着侧面彼此隔开间隔地配置。而且,该装载室具有配置在这些装载端口之间的、用于在这些装载端口与处理室之间输送被处理体的输送装置。
4.现有技术文献
5.专利文献
6.专利文献1:日本特开2008-235845号公报
技术实现要素:
7.发明要解决的技术问题
8.本发明提供能够抑制基片交接装置的设置面积的增大、并且高效率地进行输送容器的调换的技术。
9.用于解决技术问题的手段
10.本发明的基片交接方法,使用基片交接装置进行基片交接,所述基片交接装置包括:升降体,其能够将多个载置部在上下方向上排列并使这些载置部一体地升降,所述载置部用于载置收纳有基片的输送容器;和升降机构,其能够使所述升降体升降,从而使载置输送容器的各载置部各自升降移动至交接高度位置和送入送出高度位置,其中,在所述交接高度位置,能够在载置部与外部输送机构之间进行输送容器的交接,在所述送入送出高度位置,能够经由设置在用于对基片进行处理的基片处理部的输送口在输送容器与基片处理部之间进行基片的送入送出,所述基片交接方法的特征在于,包括:基片送入送出工序,使载置有输送容器的一个载置部位于所述送入送出高度位置,将被收纳在所述输送容器中的基片送入到基片处理部进行处理,并且使处理后的基片返回到所述输送容器;当所述外部输送机构要在所述交接高度位置在所述外部输送机构和与所述一个载置部不同的另一个载置部之间进行输送容器的交接时,因正在对被载置在所述一个载置部上的所述输送容器实施所述基片送入送出工序,而无法使所述另一个载置部位于所述交接高度位置的情况下,使所述基片送入送出工序暂时停止的工序;接着,使所述另一个载置部位于所述交接高度位置,在所述另一个载置部与所述外部输送机构之间进行输送容器的交接的工序;和在实施了向另一个载置部进行输送容器的交接的工序之后,使所述一个载置部移动至所述送
入送出高度位置,对被载置在所述一个载置部上的所述输送容器中的余下的基片再次开始所述基片送入送出工序的工序。
11.发明效果
12.采用本发明,能够抑制基片交接装置的设置面积的增大、并且高效率地进行输送容器的调换。
附图说明
13.图1是应用本发明的装载端口的探测装置的平面图。
14.图2是表示上述探测装置的一部分的纵截侧面图。
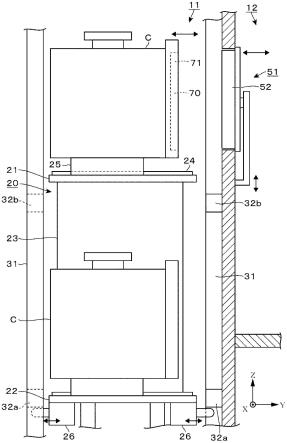
15.图3是本发明的装载端口的纵截侧面图。
16.图4是上述装载端口的第一正面图。
17.图5是上述装载端口的第二正面图。
18.图6是对上述探测装置中的开关门的开关进行说明的第一纵截侧面图。
19.图7是对上述探测装置中的开关门的开关进行说明的第二纵截侧面图。
20.图8是本发明的装载端口的第一作用图。
21.图9是本发明的装载端口的第二作用图。
22.图10是本发明的装载端口的第三作用图。
23.图11是本发明的装载端口的第四作用图。
24.图12是本发明的装载端口的第五作用图。
25.图13是本发明的装载端口的第六作用图。
26.图14是本发明的装载端口的第七作用图。
27.图15是本发明的装载端口的第八作用图。
28.图16是本发明的装载端口的第九作用图。
29.图17是本发明的装载端口的第十作用图。
30.图18是本发明的装载端口的第十一作用图。
31.图19是本发明的装载端口的第十二作用图。
32.图20是本发明的装载端口的第十三作用图。
33.图21是另一个实施方式的装载端口的第一作用图。
34.图22是另一个实施方式的装载端口的第二作用图。
35.附图标记说明
36.9控制部,11装载端口,20升降体,25载置台,33气缸,50晶片输送口,100agv,c(c1、c2、c3、c4)输送容器,w晶片。
具体实施方式
37.下面对将本发明的基片交接装置应用于探测装置的装载端口的一个实施方式进行说明。使用图1、图2对探测装置10进行说明。如图1所示,探测装置10包括用于输送作为基片的晶片w的输送室12,在输送室12的跟前设置有用于载置输送容器c的装载端口11。输送容器c收纳有例如25块作为基片的晶片w。在输送容器c的一个侧面设置有晶片w的取出口70,在取出口70设置有用于将取出口70封闭的盖体71。
38.如图2所示,在输送室12的正面壁上设置有一处晶片输送口50,晶片输送口50是用于将晶片w送入送出的输送口。在晶片输送口50上安装有能够与输送容器c的盖体71一起开关的开关门51。关于开关门51将在后面进行说明。另外,在输送室12内设置有用于输送晶片w的输送臂40。输送臂40能够相对于基台41进退,具有用于水平地支承晶片w的基片支承部44。基台41能够通过旋转轴43旋转,并且能够通过升降机构42升降。在输送室12的侧方连接有探测装置的主体部14。
39.主体部14例如使探针与形成在晶片w上的被检查芯片的电极焊盘电接触来调查该被检查芯片的电特性。输送室12和主体部14相当于基片处理部。
40.对由探测装置10进行的晶片w的处理进行说明,输送容器c例如从agv(automatic guided vehicle:自动导引车)100等外部输送机构被交接至装载端口11。被收纳在输送容器c中的晶片w被一块一块地取出,并按照输送室12
→
主体部14的路径被输送从而进行探测检查。完成了处理的处理完成的晶片w在探测装置10内按照相反的路径被输送,从而返回到输送容器c。
41.通常在对晶片w进行处理的处理装置中,将收纳有晶片w的输送容器c通过例如agv 100等外部输送机构输送至装置,调换被载置在装载端口的输送容器c并依次进行晶片w的处理。在此,为了提高处理装置的处理效率,优选在进行输送容器c的调换的期间也尽可能地进行其它的输送容器c内的晶片w的处理。
42.因此,例如可以考虑下述方法:将装载端口在横向上排列设置多个,将输送容器c输送至各装载端口,当在一个装载端口进行输送容器c的调换时,进行被载置在另一个装载端口的输送容器c内的晶片w的处理。但是,在该方法中,伴随着多个装载端口的设置数量变多,存在装置整体的占地面积变大的问题。另外,当向多处运送输送容器c时,存在用于进行外部输送机构的输送位置的位置对准的教导变得繁杂的问题。
43.基于这样的背景,本发明的探测装置10具有能够抑制装置的占地面积变大、并且能够使探测装置10的处理效率提高的装载端口11。
44.参照图2~图5对本发明的装载端口11进行说明。在下面的说明中,为了方便起见,以输送室12侧为前方侧,以装载端口11侧为后方侧进行说明。
45.如图2所示,装载端口11构成为在基台30的上方配置有升降体20。如图4、图5所示,升降体20具有在上下方向上隔开间隔排列的顶板21、底板22和用于支承这些顶板21、底板22的左右的侧壁23,构成为前面和后面开放的壳体。顶板21的左右的周缘部比侧壁23更向左右突出。
46.如图2~图5所示,在升降体20的顶板21的上表面侧和底板22的上表面侧分别设置有载置台25,载置台25是用于载置输送容器c的载置部。即,在升降体20中,能够在上下方向上排列配置2个载置台25。在载置台25设置有具有电动机或气缸等驱动部的载置台移动机构(未图示)。通过该载置台移动机构,载置台25能够沿着在前后方向上延伸的轨道24(在图2中没有图示)进行前进动作和后退动作。载置台25能够在装载位置与卸载位置之间移动,其中,装载位置是载置台25前进至输送容器c的取出口70能够与晶片输送口50连接的位置,卸载位置是载置台25从上述装载位置后退从而能够在载置台25与agv 100之间进行输送容器c的交接的位置。
47.另外,在基台30的上方,设置有将升降体20的周围包围的架构造31。而且,如图4、
图5所示,在升降体20的左右,前后各2个并排地共设置有4个从基台30向上方伸出的作为升降机构的气缸33。
48.气缸33包括:缸筒34;和设置在缸筒34内的活塞杆35,该活塞杆35的前端向上方突出。该气缸33能够通过向缸筒34内供给空气而使活塞杆35突出到缸筒34外。在本例中,以活塞杆35的前端上升的方式配置。活塞杆35的前端与升降体20的顶板21侧的从侧壁23突出的部位的下表面连接,通过使活塞杆35上升,升降体20上升,通过使活塞杆35下降,升降体20下降。
49.伴随着上述的升降体20的升降动作,设置在顶板21和底板22上的载置台25也一体地升降。由此,升降体20能够使顶板21(上段)侧、底板22(下段)侧的各载置台25移动至:能够在载置台25与外部输送机构之间进行输送容器c的交接的高度位置(交接高度位置);和能够在载置台25与输送室12之间进行晶片w的送入送出的高度位置(送入送出高度位置)。在本例中,能够在载置台25与输送室12之间进行晶片w的送入送出的高度位置(送入送出高度位置)和能够在载置台25与agv 100之间进行输送容器c的交接的高度位置(交接高度位置),被设定为相同高度。在下面的说明中,将本例中的送入送出高度位置、交接高度位置也称为基准高度位置。
50.图4表示使被载置在上段侧的载置台25上的输送容器c移动至基准高度位置的状态,图5表示使被载置在下段侧的载置台25上的输送容器c移动至基准高度位置的状态。
51.另外,在架构造31的中段设置有限制部件36a,该限制部件36a用于在升降体20下降时,使上段侧的载置台25在基准高度位置进行位置对准。限制部件36a从下表面侧与顶板21的周缘抵接,来限制升降体20的下降(图4)。另外,在架构造31的上段设置有限制部件36b,该限制部件36b用于在升降体20上升时,使下段侧的载置台25在基准高度位置进行位置对准。限制部件36b从上表面侧与顶板21的周缘抵接,来限制升降体20的上升(图5)。这些限制部件36a、36b由能够吸收限制部件36a、36b与顶板21的碰撞的冲击的冲击吸收器构成。
52.另外,如图2、图3所示,在升降体20的底板22的下表面的前后的位置设置有限位器26。这些限位器26各自形成为能够在退避至底板22的下方的位置与从底板22的下方向前后方向突出的位置之间伸缩的构造。另一方面,在架构造31的下部侧设置有卡止部32a,该卡止部32a用于在上段侧的载置台25移动至基准高度位置时,将从底板22突出的状态的限位器26从上表面侧卡止(图3)。
53.另外,在架构造31的上部侧设置有卡止部32b,该卡止部32b用于在下段侧的载置台25移动至基准高度位置时,将从底板22突出的状态的限位器26从下表面侧卡止。对于限位器26被卡止部32b卡止的状态,省略了图示。
54.在升降体20的升降动作时,使限位器26退避至底板22的下方,在使各载置台25位于基准高度时,使限位器26伸出而与卡止部32a、32b卡止。由此,升降体20被固定在规定的高度位置,能够防止位置偏移的发生、气缸33的漏气等导致的下落。
55.接着,参照图3和图6、图7对开关门51进行说明。开关门51形成为能够将输送室12的晶片输送口50封闭的板状,具有用于保持设置在输送容器c侧的盖体71的盖体保持部52。
56.盖体保持部52在与输送容器c相对的面设置有未图示的碰锁钥匙(latch key),能够相对于盖体71的钥匙孔(未图示)进行碰锁钥匙的插入和拔出。
57.该盖体保持部52能够从输送容器c卸下盖体71,并使其从将晶片输送口50封闭的
位置向前方移动从而将该晶片输送口50打开(图6)。然后,能够利用门开关机构53使开关门51退避至下方侧(图7)。
58.另外,通过使位于卸载位置的输送容器c前进以使其位于装载位置,能够将输送容器c的取出口与晶片输送口50连接。此外,能够与盖体71的拆装无关地使输送容器移动至装载位置从而将输送容器c的取出口与晶片输送口50以对准的状态连接。
59.而且,能够从输送容器c的取出口70与晶片输送口50已连接的状态使载置台25后退,来解除连接。
60.开关门51相当于盖体开关机构,载置台25的移动机构相当于将输送容器c的取出口70与晶片输送口50连接的连接机构。
61.返回到图1、图2,探测装置10具有控制部9。控制部9例如由计算机构成,具有包括程序、存储器、cpu的数据处理部。程序以能够从控制部9向探测装置10的各部发送控制信号,使包括输送容器c的交接动作、晶片w的送入送出动作在内的探测检查进行的方式编入有命令(各工序)。另外,控制部9能够为了输送容器c的回收和后续的输送容器c的送入而对agv 100发送要求输送容器c的回收、送入的呼叫信号。程序可以被保存在计算机存储介质、例如软盘、光盘、硬盘、mo(光磁盘)等存储部中而被安装到控制部9中。
62.接着,对本发明的一个实施方式的装载端口11的作用进行说明。下面,在图8~图20中,对于所收纳的晶片w,对由探测装置10进行检查的中途的输送容器c中标注点图案来表示。另外,对于所有晶片w的检查完成、等待回收的状态的输送容器c标注斜线图案来表示。另外,对于还没有开始向探测装置10送入晶片w的输送容器c,均不标注图案而用空白的状态表示。另外,从由探测装置10先进行检查的输送容器c起依次对输送容器c一并标注附图标记1、2、3、4(c1~c4)。
63.对用于输送输送容器c的agv 100进行简单说明,agv 100是能够保持输送容器c并且在设置在半导体制造工厂的装置之间进行输送的车体。agv 100包括车体主体和用于在agv 100与装载端口11的载置台25之间进行输送容器c的交接的臂101,能够在agv 100与载置台25之间进行输送容器c的交接。此外,如上所述在与agv 100之间进行输送容器c的交接的交接高度位置,与经由晶片输送口50进行晶片w的送入送出的送入送出高度位置相同(基准高度位置)。另外,agv 100能够基于从探测装置10发送的呼叫信号,进行用于对收纳有处理完成了的晶片w的输送容器c进行回收的移动、和用于将后续的输送容器c输送至探测装置10的移动。
64.首先,在接收输送容器c1之前,例如升降体20将上段侧的载置台25配置在能够接收输送容器c1的基准高度位置。然后,将由agv100输送来的输送容器c1交接至位于卸载位置的上段侧的载置台25(图8)。接着,升降体20以将下段侧的载置台25配置在能够接收输送容器c的基准高度位置的方式移动,将由agv 100输送来的输送容器c2交接至下段侧的载置台25(图9)。
65.接着,升降体20使上段侧的载置台25位于基准高度位置。接着,使输送容器c1前进以移动至装载位置,将输送容器c1的取出口70与晶片输送口50连接,将输送容器c1的盖体71打开(实施取出口与输送口的连接、和盖体的打开的工序)。然后,使输送臂40的基片支承部44进入输送容器c1,取出输送容器c1内的晶片w,并将其送入到探测装置10的主体部14中进行检查。使检查完成了的晶片w返回到输送容器c1(图10)。
66.当输送容器c1内的晶片w的检查完成、且所有晶片w返回到输送容器c1时,将输送容器c1的盖体71关闭,并使输送容器c1从装载位置后退(实施盖体的关闭、和取出口与输送口的连接的解除的工序)。然后,向agv 100发送呼叫信号,进行呼叫使其前往回收输送容器c1(图11,呼叫外部输送机构的工序)。该呼叫信号的发送在使用图12说明的、收纳在输送容器c2中的晶片w的送入送出开始之前实施。
67.在输送容器c1的晶片w的送入送出完成之后,直至agv 100为了接收输送容器c1而到达为止的期间中,使下段侧的载置台25上升至基准高度位置。接着,与已说明的输送容器c1同样地将取出口70与晶片输送口50连接,将输送容器c2的盖体71打开。然后,利用输送臂40将输送容器c2内的晶片w取出并将其送入到探测装置10内,进行检查,使检查完成了的晶片w返回到输送容器c2(图12,基片送入送出工序)。
68.在此,考虑在被载置在下段侧的载置台25(在此相当于“一个载置部”)上的输送容器c2中收纳的晶片w的处理没有完成的时刻,agv100对收纳有处理完成了的晶片w的输送容器c1进行回收的情况。在该情况下,上段侧的载置台25(在此相当于“另一个载置部”)配置在基准位置的上方,因此,无法进行输送容器c1的交接(图12)。
69.因此,本例的装载端口11,与agv 100到达能够回收输送容器c1的位置的时机相匹配地,暂时停止输送容器c2内的晶片w的送入送出(暂时停止晶片w的检查)(使基片送入送出工序暂时停止的工序)。然后,将输送容器c2的盖体71关闭,使输送容器c2后退至卸载位置。接着,使上段侧的载置台25下降至基准高度位置,由agv 100回收输送容器c1(图13,进行输送容器的交接的工序)。
70.在由agv 100回收输送容器c1之后,直至对收纳有未处理的晶片w的后续的输送容器c3进行输送的agv 100到达探测装置10为止的期间中,再次开始晶片w的检查。即,使下段侧的载置台25上升至基准高度位置,将输送容器c2的盖体71打开。使暂时停止的被收纳在输送容器c2中的晶片w的检查再次开始(图14,再次开始基片送入送出工序的工序、和基片送入送出工序)。
71.因此,在将输送容器c3输送来的agv 100到达能够交接输送容器c3的位置的时机,如图14所示,上段侧的载置台25(另一个载置部)配置在基准位置的上方。因此,无法进行输送容器c3的交接。因此,在此也暂时停止输送容器c2内的晶片w的送入送出(晶片w的检查)(使基片送入送出工序暂时停止的工序)。然后,将输送容器c2的盖体71关闭,使输送容器c2后退至卸载位置。接着,使上段侧的载置台25下降至基准高度位置,从agv 100接收输送容器c3(图15)。
72.当这样将输送容器c3交接至上段侧的载置台25之后,使下段侧的载置台25移动至基准高度位置。然后,如上述那样将输送容器c2与输送室12连接,使暂时停止的输送容器c2内的晶片w的送入送出再次开始(图16,再次开始基片送入送出工序的工序、和基片送入送出工序)。
73.然后,当输送容器c2内的晶片w的检查完成、且所有晶片w返回到输送容器c2时,将输送容器c2的盖体71关闭,并且使输送容器c2后退至卸载位置。然后,向agv 100发送呼叫信号以使其回收输送容器c2(图17,呼叫外部输送机构的工序)。
74.当发送了呼叫信号时,在agv 100为了接收输送容器c2而进行移动的期间,使上段侧的载置台25(在此相当于“一个载置部”)移动至基准高度位置。然后,使输送容器c3前进
至装载位置从而将取出口70与晶片输送口50连接,将输送容器c3的盖体71卸下。然后利用输送臂40将输送容器c3内的晶片w取出,并将其送入到探测装置中进行晶片w的检查,使检测完成了的晶片w返回到输送容器c3(图18,基片送入送出工序)。
75.然后,与用于回收输送容器c2的agv 100到达回收位置的时机相匹配地,暂时停止输送容器c3内的晶片w的检查(使基片送入送出工序暂时停止的工序)。然后,将输送容器c3的盖体71关闭,使输送容器c3后退至卸载位置。接着,使下段侧的载置台25(在此相当于“另一个载置部”)上升至基准高度位置,由agv 100回收输送容器c2(图19,进行输送容器的交接的工序)。
76.接着,在agv 100回收输送容器c2之后,直至用于输送后续的输送容器c4的agv 100到达探测装置10为止的期间中,再次开始晶片w的检查。即,使上段侧的载置台25下降至基准高度位置,再次开始晶片w的检查(图20,使基片送入送出工序再次开始的工序、和基片送入送出工序)。
77.下面,基于使用图9~图20说明的动作,反复进行依次调换输送容器c1~c4的动作,进行晶片w的检查。
78.上述的实施方式中,在装载端口11中设置有升降体20,其在上下两段配置有用于载置输送容器c的载置台25。而且构成为,通过使升降体20升降,能够使被载置在各载置台25上的输送容器c位于用于将晶片w送入到探测装置10中的送入送出高度位置。通过这样在上下配置用于载置输送容器c的载置台25,能够防止设置装载端口11的面积变大。
79.然后,被载置在一个载置台25上的输送容器c(下面也称为“一个输送容器c”)内的晶片w的探测检查完成。接着,直至用于回收该输送容器c的agv 100到达回收位置为止,使被载置在另一个载置台25上的输送容器c(下面也称为“另一个输送容器c”)移动至送入送出高度位置以进行晶片w的探测检查。通过构成为这样,能够在agv100前往回收输送容器c的期间中,进行另一个输送容器c内的晶片w的检查。
80.另外,当用于回收一个输送容器c的agv 100到达时,使另一个输送容器c的晶片w的处理暂时停止之后,进行上述一个输送容器c的回收。然后,在回收了一个输送容器c之后,在用于输送收纳有未处理晶片w的后续的新的输送容器c的agv 100到达探测装置之前,进行暂时停止了处理的一个输送容器c内的晶片w的处理。通过构成为这样,在进行新的输送容器c的送入的agv 100移动的期间,能够进行被收纳在另一个输送容器c中的晶片w的探测检查。通过上述的作用,与多个载置台25采用上下排列的构造相伴的输送容器c的交接动作能够抑制晶片w的处理效率的降低,使探测装置10的生产率提高。
81.在此,进行输送容器c内的晶片w的送入送出的送入送出高度位置、和在载置台与agv 100之间进行输送容器c的交接的交接高度位置也可以设定为不同的高度位置。
82.例如图21的(a)~(f)、图22的(a)~(f)表示使用作为外部输送机构的oht(overhead hoist transport:吊运装置)103进行输送容器c的交接的例子。
83.在该例子中,在下段侧的输送容器c位于进行晶片w的送入送出的高度位置(送入送出高度位置)时,上段侧的输送容器c位于进行输送容器c的交接的高度位置(交接高度位置)。
84.而且在该例子中,具有用于载置从oht 103下降的输送容器c的载置部102,被载置在载置部上的输送容器c例如由输送臂(未图示)交接至位于进行输送容器c的交接的高度
位置的载置台25。
85.在该例子中,如图21的(a)~(c)所示,首先,例如输送容器c1被交接至下段侧的载置台25,输送容器c2被交接至上段侧。然后使下段侧的输送容器c1的处理完成。进而,在接着进行上段侧的输送容器c2的处理时,在载置台与oht 103之间进行下段侧的输送容器c1的交接。在该情况下,上段侧的输送容器c2的处理需要暂时停止(图21的(d)~(f)的动作)。
86.另一方面,如图22的(a)~(c)所示向下段侧交接新的输送容器c3,使上段侧的输送容器c2的处理完成。然后,在接着进行下段侧的输送容器c3的处理时,在载置台与oht 103之间进行上段侧的输送容器c2的交接。在该情况下,下段侧的输送容器c3的处理不需要暂时停止,而能够与上段侧的处理容器的交接并行地实施(图22的(d)~(f)的动作)。此外,在图21中的(a)、(b)的动作中,在上段侧的载置台25位于交接输送容器c的高度位置时,下段侧的输送容器c1位于将晶片w送入送出的高度位置。因此,能够在进行输送容器c2的交接的期间进行输送容器c1的处理。
87.另外,可以是将载置台25构成为能够滑动至比顶板21和底板22向后方侧伸出的位置,利用比该顶板21和底板22靠后方侧的位置的载置台25在载置台25与oht 103之间交接输送容器c。
88.而且,升降体20可以构成为在上下配置有3段以上的载置台25。另外,本发明的装载端口11并不限于探测装置10,也可以用于成膜装置或蚀刻装置等基片处理装置。
89.本次公开的实施方式在所有方面均应认为是例示性的而不是限制性的。上述的实施方式在不脱离所附的权利要求书及其主旨的情况下,可以以各种形式省略、替换、变更。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
