1.本发明涉及投影显示领域,尤其涉及一种扫描器驱动方法及光纤扫描装置。
背景技术:
2.扫描投影技术的成像原理是,通过光源调制出待显示图像的每个像素点对应的光,然后,通过扫描器带动扫描光纤或通过mems(英文全称:microelectro mechanical systems,中文名称:微机电系统)扫描镜的运动,扫描输出每个像素点对应的光,从而将待显示图像的每个像素点对应的光逐一投射到投影屏幕上,形成投影画面。
3.以光纤扫描成像系统为例,光纤扫描成像系统一般包括光纤扫描器和光源,光源产生图像上每个像素点的光,然后,将每个像素点的光耦入光纤中,再由光纤扫描器带动光纤进行扫描振动,从而将图像上的每个像素点的光逐一投射到投影屏幕上,形成投影画面。
4.一般来讲,在光纤扫描振动过程中,为了保证投影效果,必须使光纤在每个慢轴周期内完全做重复运动。为了使光纤在每个周期内完全做重复运动,在对光纤扫描器进行控制时,快轴驱动信号和慢轴驱动信号的频率须呈整数倍关系。目前,在产生快轴驱动信号和慢轴驱动信号时,可以采用通用的dds(direct digital frequency synthesis,直接数字频率合成)信号生成算法。
5.通用dds信号发生器具体原理如图1所示,图中相位累加器是由n位加法器和n位寄存器构成,它是dds模块中一个极其重要的部分。在参考时钟的驱动下,dds模块开始工作;在每一个时钟到来时,累加器就把频率控制字fw与寄存器输出的值进行累加,将相加后的结果再输入到波形寄存器中,而寄存器就将在上一个参考时钟的作用时产生的数据通过反馈的方式输送到累加器中。这样在时钟的作用下,就可以不停地对频率控制字fw进行累加。此时用相位累加器输出的数据作为地址,在波形存储器中通过查找地址所对应的幅值表,就可以完成其从相位到幅值之间的转化。
6.在dds模块中,输出频率公式为fo=fclk*fw/2^n;在存储波形rom时,为了提高内存利用率,往往选择2的整数次幂的深度进行存储,而计算fw时,为了使实际驱动频率逼近输出期望频率,往往会导致rom步进地址不是按2的整数次幂步进,这将使得输出给da转换器的波形在每个周期并不完全重复,造成每个周期的相位波动,这样两路驱动信号无法保证每个周期内的波形完全重复,也就无法使得光纤在每个慢轴周期内轨迹重合。
7.可见,由于通用的dds信号生成算法一般以频率误差最小为目标,无法保证产生的两路信号频率呈整数倍,这样会使得光纤无法在每个周期内完全做重复运动,投影图像产生晃动。
技术实现要素:
8.本发明的目的是提供一种扫描器驱动方法及光纤扫描装置,用以解决现有技术中存在的传统的dds信号生成算法无法保证频率为整数倍,导致投影显示图像晃动的技术问题。
9.为了实现上述发明目的,本发明实施例第一方面提供一种扫描器驱动方法,应用于光纤扫描装置中,所述光纤扫描装置包括光纤扫描器和波形存储器,所述光纤扫描器包括快轴和慢轴,所述波形存储器中预先存储有快轴驱动信号的量化数据和慢轴驱动信号的量化数据,所述快轴驱动信号和所述慢轴驱动信号的量化点数相同;所述方法包括:
10.根据第一存储器地址步进,从所述波形存储器中读取所述快轴驱动信号的量化数据,生成快轴驱动信号;
11.根据第二存储器地址步进,从所述波形存储器中读取所述慢轴驱动信号的量化数据,生成慢轴驱动信号;其中,所述第一存储器地址步进大于所述第二存储器地址步进,且一个慢轴扫描周期内的慢轴输出点数与一个快轴扫描周期内的快轴输出点数呈整数倍关系;
12.通过所述快轴驱动信号和所述慢轴驱动信号分别对所述快轴和所述慢轴进行驱动。
13.可选的,生成快轴驱动信号的量化数据和慢轴驱动信号的量化数据的方法,包括:
14.根据目标快轴频率f
x
,计算数字模拟转换器dac的输出时间间隔δt和一个快轴扫描周期内的快轴输出点数n
x
;
15.根据所述实际快轴频率1/(n
x
*δt)、目标慢轴频率fy和所述快轴输出点数n
x
,计算所述慢轴输出点数ny;其中,ny/n
x
等于(1/(n
x
*δt))/fy四舍五入得到的整数;
16.将所述慢轴输出点数ny作为所述量化点数,分别对所述快轴驱动信号的波形和所述慢轴驱动信号的波形进行采样,得到所述快轴驱动信号的量化数据和所述慢轴驱动信号的量化数据。
17.可选的,所述第二存储器地址步进为1,所述第一存储器地址步进等于ny/n
x
。
18.可选的,根据目标快轴频率f
x
,计算数字模拟转换器dac的输出时间间隔δt和一个快轴扫描周期内的快轴输出点数n
x
,包括:
19.根据采样定理和所述dac的最大更新速率确定所述输出时间间隔δt的范围;
20.根据所述输出时间间隔δt的范围和所述dac的调节精度,确定所有可能的δt备选值;
21.根据目标快轴频率f
x
,确定每个所述δt备选值对应的n
x
备选值;
22.选择周期误差最小的δt备选值作为所述dac的输出时间间隔δt,以及选择周期误差最小的δt备选值对应的n
x
备选值作为所述快轴输出点数n
x
;其中,所述周期误差是指δt*n
x
与1/f
x
之间的差值。
23.可选的,若存在多个δt备选值和对应的n
x
备选值使得所述周期误差最小时,选择最小的δt备选值作为所述dac的时间间隔δt,以及选择所述最小的δt备选值对应的n
x
备选值作为所述快轴输出点数n
x
。
24.可选的,从所述波形存储器中读取所述快轴驱动信号的起始位置由所述量化点数和所述快轴驱动信号的初始相位计算得到;从所述波形存储器中读取所述慢轴驱动信号的起始位置由所述量化点数和所述慢轴驱动信号的初始相位计算得到。
25.可选的,所述快轴驱动信号和所述慢轴驱动信号的信号类型相同,所述快轴驱动信号和所述慢轴驱动信号共用一组量化数据。
26.本发明实施例第二方面提供一种光纤扫描装置,包括光纤扫描器、波形存储器、处
理器和计算机可读存储介质,所述光纤扫描器包括快轴和慢轴,所述波形存储器中预先存储有快轴驱动信号的量化数据和慢轴驱动信号的量化数据,所述快轴驱动信号和所述慢轴驱动信号的量化点数相同;所述计算机可读存储介质上存储有计算机程序,当所述计算机程序被所述处理器执行时,使得所述处理器执行第一方面所述的方法。
27.本发明实施例中的一个或者多个技术方案,至少具有如下技术效果或者优点:
28.本发明实施例的方案中,通过在波形存储器中预先存储快轴驱动信号的量化数据和慢轴驱动信号的量化数据,所述快轴驱动信号和所述慢轴驱动信号的量化点数相同,在输出驱动信号时,通过保证一个慢轴扫描周期内的慢轴输出点数与一个快轴扫描周期内的快轴输出点数呈整数倍关系,即可保证两路输出信号的频率为整数倍,从而解决现有技术中存在的,传统的dds信号生成算法无法保证频率为整数倍,导致投影显示图像晃动的技术问题,使得光纤在每个周期内运动轨迹重复,实现图像能稳定显示的技术效果。
附图说明
29.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图:
30.图1为现有技术中通用dds信号发生器的原理图;
31.图2a-图2b为本发明实施例中的光纤扫描投影成像系统的结构示意图;
32.图2c为本发明实施例中的光纤扫描器的快轴和慢轴的示意图;
33.图3为本发明实施例提供的扫描器驱动方法的流程示意图;
34.图4为本发明实施例提供的生成快轴驱动信号的量化数据和慢轴驱动信号的量化数据的方法流程示意图;
35.图5a为本发明实施例提供的快轴驱动信号的波形示意图;
36.图5b为本发明实施例提供的快轴驱动信号的量化数据表;
37.图6为本发明实施例提供的计算输出时间间隔和快轴输出点数的方法流程示意图;
38.图7为本发明实施例提供的快慢轴频率为整数倍时的扫描轨迹示意图;
39.图8为本发明实施例提供的快慢轴频率为非整数倍时的扫描轨迹示意图;
40.图9为本发明实施例提供的光纤扫描装置的模块示意图。
具体实施方式
41.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
42.光纤扫描投影成像系统利用光纤扫描器中的致动器带动光纤高速振动,并配合激光调制算法,实现图像信息的显示。如图2a所示,为现有的一种光纤扫描投影成像系统,其主要包括:处理器100、激光器组110、光纤扫描器120、传输光纤130、光源调制电路140、扫描
驱动电路150及合束单元160。
43.其中,处理器100可以为图形处理器(graphics processing unit,gpu)、中央处理器(central processing unit,cpu)或者其它具有控制功能、图像处理功能的芯片或电路,这里并不进行具体限定。
44.系统工作时,处理器100可根据待显示的图像数据控制光源调制电路140对激光器组110进行调制,激光器组110中包含多个单色激光器,分别发出不同颜色的光束。从图2a中可见,激光器组中具体可采用红(red,r)、绿(green,g)、蓝(blue,b)三色激光器。激光器组110中各激光器发出的光束经由合束单元160合束为一束激光并耦入至传输光纤130中。
45.处理器100还可控制扫描驱动电路150驱动光纤扫描器120进行扫动,从而将传输光纤130中传输的光束扫描输出。
46.由光纤扫描器120扫描输出的光束作用于介质表面上某一像素点位置,并在该像素点位置上形成光斑,便实现了对该像素点位置的扫描。在光纤扫描器120带动下,传输光纤130输出端按照一定扫描轨迹扫动,从而使得光束移动至对应的像素点位置进行扫描。实际扫描过程中,传输光纤130输出的光束将在每个像素点位置形成具有相应图像信息(如:颜色、灰度或亮度)的光斑。在一帧的时间里,光束以足够高的速度遍历每一像素点位置完成一帧图像的扫描,由于人眼观察事物存在“视觉残留”的特点,故人眼便无法察觉光束在每一像素点位置上的移动,而是看见一帧完整的图像。
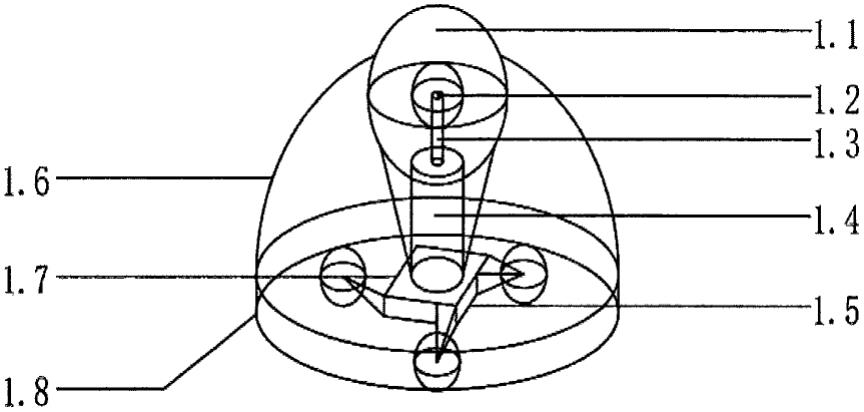
47.继续参考图2b,为现有的光纤扫描器120的结构,其主要包括:压电致动器121、光纤悬臂122、透镜123、扫描器封装壳124以及固定件125。压电致动器121通过固定件125固定于扫描器封装壳124中,传输光纤130在致动器121的自由端延伸形成光纤悬臂122(也可称为扫描光纤),工作时,压电致动器121在扫描驱动信号的驱动下沿y轴方向及x轴方向振动,受压电致动器121带动,光纤悬臂122的自由端按预设轨迹扫动并出射光束,出射的光束便可透过透镜123在介质表面上扫描。
48.继续参考图2c,为光纤扫描器的快轴和慢轴的示意图,压电致动器121包括快轴1210和慢轴1211,慢轴1211能够驱动快轴1210以第一方向(y轴方向)振动,快轴1210能够以第二方向(x轴方向)振动,光纤一端超出快轴1210并形成光纤悬臂122,光纤悬臂122的自由端最终被带动以第一方向与第二方向的合成方向上在三维空间中扫动,出射的光束便可介质表面上形成图像。
49.本发明实施例中,光纤扫描装置包括光纤扫描器和波形存储器,所述光纤扫描器包括快轴和慢轴,所述波形存储器中预先存储有快轴驱动信号的量化数据和慢轴驱动信号的量化数据,所述快轴驱动信号和所述慢轴驱动信号的量化点数相同。其中,快轴驱动信号用于驱动快轴沿x方向振动,慢轴驱动信号用于驱动慢轴带动快轴和扫描光纤沿y方向振动,从而形成如图2a中所示的扫描轨迹;波形存储器可以为rom(read only memory,只读存储器)。
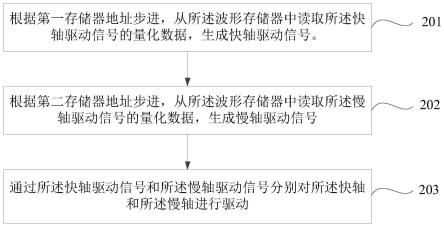
50.请参考图3,图3为本发明实施例提供的扫描器驱动方法的流程示意图,包括以下步骤。
51.步骤201,根据第一存储器地址步进,从所述波形存储器中读取所述快轴驱动信号的量化数据,生成快轴驱动信号。
52.步骤202,根据第二存储器地址步进,从所述波形存储器中读取所述慢轴驱动信号
的量化数据,生成慢轴驱动信号。
53.步骤203,通过所述快轴驱动信号和所述慢轴驱动信号分别对所述快轴和所述慢轴进行驱动。
54.本发明实施例中,对快轴驱动信号和慢轴驱动信号的波形进行量化后的量化数据存储到光纤扫描装置的波形存储器中;光纤扫描装置需要驱动致动器振动时,根据快轴的第一存储器地址步进、慢轴的第二存储器地址步进以及各自的初始相位,从波形存储器中读取量化数据,然后通过快轴和慢轴分别对应的dac(digital-to-analog converter,数字模拟转换器)生成驱动信号,从而实现对快轴和慢轴的驱动。对于一个光纤扫描器而言,在其出厂设置完成后,波形数据可以是已经固化好并存储在rom中。对于压电致动器而言,其驱动信号的量化数据包括电压值。其中,读取所述快轴驱动信号的起始位置可以由所述量化点数和所述快轴驱动信号的初始相位计算得到;读取所述慢轴驱动信号的起始位置可以由所述量化点数和所述慢轴驱动信号的初始相位计算得到。
55.本发明实施例中,第一存储器地址步进大于所述第二存储器地址步进,也就是说,输出快轴驱动信号的地址步进大于输出慢轴驱动信号的地址步进,所述快轴驱动信号和所述慢轴驱动信号的更新速率相同,且一个慢轴扫描周期内的慢轴输出点数与一个快轴扫描周期内的快轴输出点数呈整数倍关系,即可保证两路输出信号的频率为整数倍,本发明实施例中,不需要采用传统的dds信号发生器中的相位累加器和频率控制字fw,从而解决现有技术中存在的,传统的dds信号生成算法无法保证频率为整数倍,导致投影显示图像晃动的技术问题,使得光纤在每个周期内运动轨迹重复,即快轴和慢轴在各自的每个运动周期内完全重复,且每个慢轴周期内快轴周期数为整数,从而实现图像能稳定显示的技术效果。
56.本发明实施例中,驱动信号可以为正弦波信号、三角波信号或锯齿波信号等等,快轴驱动信号和慢轴驱动信号的信号类型可以相同,也可以不同,本发明对此不做限制。
57.在一种可能的实施方式中,在快轴驱动信号和慢轴驱动信号的信号类型相同时,快轴驱动信号和慢轴驱动信号可以共用一组量化数据,量化数据可以以量化数据表的形式存储在波形存储器中,但其在读取数据时的地址步进不同,初始相位可以相同或不同。
58.接下来,对本发明实施例中生成快轴驱动信号的量化数据和慢轴驱动信号的量化数据的方法进行说明,当需要产生两路信号时,应先以频率高的信号为基准计算输出时间间隔δt和输出点数n(对于光纤扫描器而言,快轴频率大于慢轴频率),使得根据输出时间间隔δt和输出点数n最终得到的驱动信号的频率最接近期望产生的频率(即目标快轴频率f
x
),如图4所示,该生成方法包括以下步骤。
59.步骤301,根据目标快轴频率f
x
,计算数字模拟转换器dac的输出时间间隔δt和一个快轴扫描周期内的快轴输出点数n
x
。
60.其中,dac的输出时间间隔δt是指dac输出一个点的时间间隔;为了使得光纤的摆动幅度最大,目标快轴频率可以接近或等于光纤的固有频率。需要说明的是,目标快轴频率不是最终的快轴驱动频率(即实际快轴频率),最终的快轴驱动频率由目标快轴频率和dac的性能等因素决定。由步骤301可知,最终的快轴驱动频率等于1/(n
x
*δt)。
61.步骤302,根据所述实际快轴频率1/(n
x
*δt)、目标慢轴频率fy和所述快轴输出点数n
x
,计算所述慢轴输出点数ny;其中,ny/n
x
等于(1/(n
x
*δt))/fy四舍五入得到的整数。因此,根据(1/(n
x
*δt))/fy四舍五入得到的整数和步骤301中计算得到的快轴输出点数n
x
,就可以
计算得到慢轴输出点数ny。同理,目标慢轴频率也不是最终的慢轴驱动频率,最终的慢轴驱动频率由(1/(n
x
*δt))/fy四舍五入得到的整数和步骤301中计算得到的快轴输出点数n
x
决定。
62.步骤303,将所述慢轴输出点数ny作为所述量化点数,分别对所述快轴驱动信号的波形和所述慢轴驱动信号的波形进行采样,得到所述快轴驱动信号的量化数据和所述慢轴驱动信号的量化数据。
63.本发明实施例中,假设驱动信号为正弦波信号,如图5a所示,为快轴驱动信号的波形示意图,在量化点数确定后,根据量化点数对快轴驱动信号的波形进行采样,就可以得到快轴驱动信号的量化数据,图5b所示,为快轴驱动信号的量化数据表,每个量化数据中包括驱动信号的电压量化数值。本发明实施例中,采用同样的方法可以得到慢轴驱动信号的量化数据,在此不再赘述。
64.本发明实施例中,在从波形存储器中读取量化数据以生产快轴驱动信号和慢轴驱动信号时,所述第二存储器地址步进可以为1,所述第一存储器地址步进等于ny/n
x
。
65.接下来,对步骤301的实现方式进行说明,如图6所示,包括以下步骤。
66.步骤3011,根据采样定理和所述dac的最大更新速率确定所述输出时间间隔δt的范围。其中,采样定理是指进行模拟/数字信号的转换过程中,当采样频率fs大于信号中最高频率fmax的2倍时(fs》2*fmax),采样之后的数字信号就完整的保留了原始信号中的信息。
67.步骤3012,根据所述输出时间间隔δt的范围和所述dac的调节精度,确定所有可能的δt备选值。本发明实施例中,以芯片型号为dac8563为例进行说明。δt=1 n*0.02是由于选用的dac芯片为dac8563,该芯片支持的最高控制接口(使用该接口对其送入数字信号)频率为50mhz(对应周期为0.02us),最高更新速率为1us输出1个点(即50个50mhz时钟周期输出1个点,调节更新速率时,只能按整数个周期调节,也即δt=0.02*(50 n),n为大于等于0的整数,即0,1,2,3
……
,所以δt=1 n*0.02。那么如何枚举出所有的δt和n值呢?由于t=δt*n=(1 n*0.02)*n,以及快轴周期t是我们期望的已知值(目标快轴频率f
x
是已知的,对应的期望的快轴周期t也是已知的),并且,δt需要遵循采样定理导致取值被限定,这样就可以根据每个n得到所有可能的n值,即枚举出了所有可能的δt和n。
68.步骤3013,根据目标快轴频率f
x
,确定每个所述δt备选值对应的n
x
备选值。在确定n
x
备选值时,根据每个δt备选值枚举出使得δt*n
x
最接近t
x
(t
x
=1/f
x
)的n值,就可以得到对应的n
x
备选值。
69.步骤3014,选择周期误差最小的δt备选值作为所述dac的输出时间间隔δt,以及选择周期误差最小的δt备选值对应的n
x
备选值作为所述快轴输出点数n
x
;其中,所述周期误差是指δt*n
x
与1/f
x
之间的差值。
70.本发明实施例中,为了保证驱动信号的波形的输出准确度,若存在多个δt备选值和对应的n
x
备选值使得所述周期误差最小时,选择最小的δt备选值作为所述dac的时间间隔δt,以及选择所述最小的δt备选值对应的n
x
备选值作为所述快轴输出点数n
x
,使得dac在一个周期内输出的点数尽量多以保证波形的准确度。
71.从上述本发明实施例的方案可以看出,为了使两路dds输出信号频率为整数倍,在量化波形rom时不能使用传统dds信号产生方法使用固定的点数(一个周期),而需要根据当
前期望产生的两路信号频率来确定具体的量化点数n(一个周期),由于需要产生两路信号,所以在两路dac的控制上选取相同的更新速率(即快轴对应dac输出一个点的时间和慢轴对应dac输出一个点的时间相同均为δt,且输出同步)来保证两路信号输出误差最小,输出信号的周期t=δt*n,如果使两路信号周期为整数倍关系,则二者的频率也为整数倍关系,两路信号周期分别为t
x
=δt*n
x
,ty=δt*ny,则使n
x
和ny为整数倍,即可保证两路输出信号的频率为整数倍。
72.当产生两路信号时,应先以频率高的信号为基准计算δt和n值,使得其最接近期望产生的频率f,如前述实施例所述,根据采样定理将δt限定在一个输出速率可接受的范围,这样可以枚举出所有的δt值,然后根据每个δt值再枚举出使得δt*n接近t的n值,然后选取周期误差最小的δt及对应的n值,若存在多个结果使周期误差最小且相同则选择δt最小的一组,使得dac在一个周期内输出的点数尽量多以保证波形的准确度。
73.假设fy《f
x
,f
x
为目标快轴频率,fy为目标慢轴频率,通过枚举所有可能的δt和n
x
值,选取出n
x
,再根据n
x
及(1/(n
x
*δt))/fy决定出ny,然后将两路信号均按点数ny进行量化,在输出信号时,频率低的信号rom地址步进为1,频率高的信号rom地址步进为ny/n
x
,两路信号的dac更新一个点的时间间隔为δt,两路信号相位调整步进均为1,相位调整精度为2π/ny。
74.如图7所示,以两路信号频率分别为200hz和10hz举例,当两路dds信号频率为严格整数倍时且初始相位均为-π/2时,光纤的运动轨迹为图7所示。
75.如图8所示,当两路dds信号不为整数倍时,以频率分别为100.6hz和10hz为例,光纤将出现如图8所示轨迹,这样将导致显示图像时晃动。
76.基于同一发明构思,本发明实施例还提供一种光纤扫描装置,如图9所示,图9为本发明实施例提供的光纤扫描装置的示意图;光纤扫描装置包括光纤扫描器901、波形存储器902、处理器903和计算机可读存储介质904,所述光纤扫描器901包括快轴和慢轴,所述波形存储器902中预先存储有快轴驱动信号的量化数据和慢轴驱动信号的量化数据,所述快轴驱动信号和所述慢轴驱动信号的量化点数相同;所述计算机可读存储介质904上存储有计算机程序,当所述计算机程序被所述处理器903执行时,使得所述处理器903执行上述任一实施例中的方法。
77.本发明实施例中的光纤扫描装置可以应用至各种投影显示设备中,如:ar(英文全称:augmented reality;中文名称:增强现实)设备、激光电视、激光投影仪等等,在这些投影显示设备中,可以使用一个光纤扫描装置进行扫描显示,也可以通过多个光纤扫描装置拼接的方式进行显示,本发明对此不做限制。
78.本发明实施例中的一个或者多个技术方案,至少具有如下技术效果或者优点:
79.本发明实施例的方案中,通过在波形存储器中预先存储快轴驱动信号的量化数据和慢轴驱动信号的量化数据,所述快轴驱动信号和所述慢轴驱动信号的量化点数相同,在输出驱动信号时,通过保证一个慢轴扫描周期内的慢轴输出点数与一个快轴扫描周期内的快轴输出点数呈整数倍关系,即可保证两路输出信号的频率为整数倍,从而解决现有技术中存在的,传统的dds信号生成算法无法保证频率为整数倍,导致投影显示图像晃动的技术问题,使得光纤在每个周期内运动轨迹重复,实现图像能稳定显示的技术效果。
80.本说明书中公开的所有特征,或公开的所有方法或过程中的步骤,除了互相排斥的特征和/或步骤以外,均可以以任何方式组合。
81.本说明书(包括任何附加权利要求、摘要和附图)中公开的任一特征,除非特别叙述,均可被其他等效或具有类似目的的替代特征加以替换。即,除非特别叙述,每个特征只是一系列等效或类似特征中的一个例子而已。
82.本发明并不局限于前述的具体实施方式。本发明扩展到任何在本说明书中披露的新特征或任何新的组合,以及披露的任一新的方法或过程的步骤或任何新的组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。