1.本发明涉及一种风动力雪地漫游机器人,属于机器人辅助工作技术领域。
背景技术:
2.目前人类在雪地上的运输设备主要分为畜力型和机械动力型。蓄力型操作灵活,但速度慢,耐力差,不能长期在恶劣环境下开展工作,且饲养成本高。机械动力型动力强,速度快,但需要对其提供能源。目前主要的能量供给方案为化石能源、电能、太阳能等,可能存在环境污染,能量供应不足等问题。
3.雪地漫游机器人可用于极地科考领域。地球两极蕴含丰富的自然资源,对其开展科学考察具有重大意义。但两极地区自然环境恶劣,科研人员难以长期驻留,极地机器人可以帮助科研人员实现长期无人自主探测。极地能源匮乏,燃料运输困难。利用风能等清洁能源对于极地机器人是一种可行的方式。
4.人类对于风帆的应用和研究主要在帆船上,对于风帆的空气动力学特性研究已经比较成熟。现代风帆控制理论可以让机器人在一定范围内实现任意方向的运动,甚至可以在完全逆风的情况下实现顶风航行。现有采用风能驱动的雪地漫游机器人,大多是采用风力发电,将风能转化为电能后使用,能量使用效率低下。
5.申请号为201711148932.0的发明专利申请公开了一种太阳能风帆雪橇机器人,该机器人采用风能和太阳能驱动,依靠风能推动雪橇移动,依靠太阳能供电。采用硬质风帆,直接驱动桅杆转轴转动,采用2块雪橇,直接连接在机架上,路面适应性差。
6.申请号为201910806345.9的发明专利申请公开了一种履带雪橇复合行走极地机器人,通过四条独立的变位履带实现越障,通过风帆实现在平坦的雪地滑行。但是,因其履带数量较多,驱动结构较复杂,能耗较大,且该申请中仅对风力驱动提出概念,并未设计其具体的控制方法,并且其同样是采用2块雪橇直接连接在机架上,路面适应性差。
技术实现要素:
7.本发明是为了解决现有的雪地漫游机器人能耗高以及路面适应性差的问题,进而提供了一种风动力雪地漫游机器人。
8.本发明为解决上述技术问题所采用的技术方案是:
9.一种风动力雪地漫游机器人,它包括机架、转向机构、风动力驱动模块及四组悬架;其中四组所述悬架两两相对安装在机架的两侧,每组所述悬架均包括固装在机架上的主架体及铰接在主架体底端的雪橇板;
10.所述转向机构位于机架的前部,转向机构包括电动推杆、连接板、转向舵机、齿轮、齿条及两个转向连杆,其中所述转向舵机固装在连接板上,电动推杆的固定端安装在机架上,电动推杆的自由端与连接板固接,且转向舵机直连齿轮,所述齿轮与齿条啮合,两个转向连杆的一端分别通过万向节连接在齿条的左右两端,且两个转向连杆的另一端分别通过万向节连接至机架前部的两个主架体,所述连接板通过电动推杆实现在机架上的前后滑
动;
11.所述风动力驱动模块包括桅杆、风帆、连接绳及定滑轮组,所述桅杆安装在机架上部,风帆一侧套装在桅杆上,另一侧底端固装连接绳的一端,连接绳的另一端穿过定滑轮组缠绕在手轮上,所述手轮通过手轮伺服电机及减速器驱动;
12.所述机架包括机架主体以及安装在机架主体上的电控箱、风向传感器、风速传感器及电池,电控箱与电池电连接,电动推杆、转向舵机、风向传感器、风速传感器及手轮伺服电机均与电控箱信号连接。
13.进一步地,所述主架体包括上叉臂、下叉臂、减震器以及雪橇立轴,其中上叉臂、下叉臂以及减震器的一端均与机架主体铰接,上叉臂及下叉臂的另一端均与雪橇立轴铰接,减震器的另一端与下叉臂铰接,雪橇板与雪橇立轴的下端铰接。
14.进一步地,每组相对位于机架两侧的两个雪橇立轴呈八字形布置。
15.进一步地,所述定滑轮组包括第一至第三定滑轮,所述第一定滑轮通过支杆安装至机架的后方,第二定滑轮安装在风帆底部,第三定滑轮安装至机架主体内部,连接绳依次绕设在第一至第三定滑轮上。
16.进一步地,所述电控箱、风向传感器及风速传感器均位于机架主体的前部。
17.进一步地,所述机架还包括安装在机架主体上的直线导轨,所述电池左右滑动安装在直线导轨上。
18.进一步地,所述机架主体上还设置有货仓。
19.进一步地,连接板的底部通过两组导轨滑块组件作为导向元件实现前后滑动。
20.进一步地,电动推杆的数量为三个且并排布置。
21.进一步地,第二定滑轮的数量为两个。
22.本发明与现有技术相比具有以下效果:
23.本技术采用风能驱动,风能是可再生能源,节能环保,不产生污染,可长时间利用其进行工作。利用风能直接驱动,能量利用率高。使用清洁能源,拥有节能环保、可持续工作时间长、活动灵活等特点,可应用于雪地运输、极地科考等领域。
24.该机器人可以通过传感器,自动改变风帆的角度,实现自动控制,并保证风帆角度始终处于风能利用的最优状态。
25.采用四块雪橇与地面接触,阻力小,接触面积大,不易陷入雪中,拥有更好的路面适应性和通过性。
26.转向机构可以改变前方雪橇的方向进行转向,还可以实现犁式刹车。机构简单,能量损坏小,易于控制。
附图说明
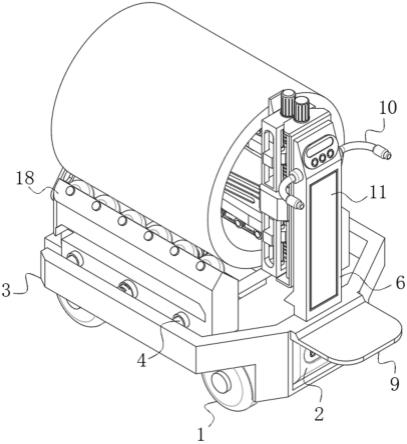
27.图1为本技术的立体结构示意图;
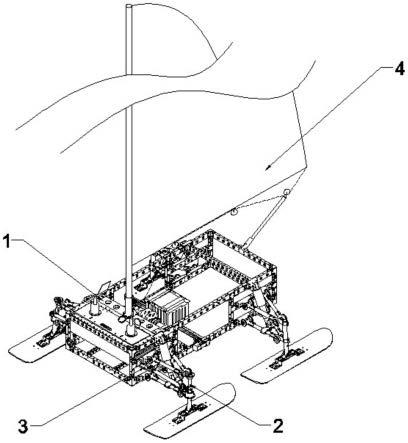
28.图2为本技术的侧视示意图;
29.图3为本技术的前视示意图(风帆未示出);
30.图4为本技术的俯视示意图(风帆未示出);
31.图5为悬架的立体结构示意图;
32.图6为转向机构的立体结构示意图;
33.图7为手轮的立体结构示意图;
34.图8为前进、转向和刹车运动的机构运动简图,其中a)为前进状态简图,b)为刹车状态简图,c)为转向状态简图;
35.图9为风帆角度控制的机构运动简图,其中a)、b)分别为两种不同的状态(图中显示的第二定滑轮的数量为一个)。
具体实施方式
36.具体实施方式一:结合图1~9说明本实施方式,一种风动力雪地漫游机器人,它包括机架1、转向机构3、风动力驱动模块4及四组悬架2;其中四组所述悬架2两两相对安装在机架1的两侧,每组所述悬架2均包括固装在机架1上的主架体及铰接在主架体底端的雪橇板205;
37.所述转向机构3位于机架1的前部,转向机构3包括电动推杆301、连接板307、转向舵机302、齿轮303、齿条304及两个转向连杆305,其中所述转向舵机302固装在连接板307上,电动推杆301的固定端安装在机架1上,电动推杆301的自由端与连接板307固接,且转向舵机302直连齿轮303,所述齿轮303与齿条304啮合,两个转向连杆305的一端分别通过万向节连接在齿条304的左右两端,且两个转向连杆305的另一端分别通过万向节连接至机架1前部的两个主架体,所述连接板307通过电动推杆301实现在机架1上的前后滑动;
38.所述风动力驱动模块4包括桅杆401、风帆402、连接绳403及定滑轮组,所述桅杆401安装在机架1上部,风帆402一侧套装在桅杆401上,另一侧底端固装连接绳403的一端,连接绳403的另一端穿过定滑轮组缠绕在手轮404上,所述手轮404通过手轮伺服电机405及减速器406驱动;
39.所述机架1包括机架主体以及安装在机架主体上的电控箱101、风向传感器102、风速传感器103及电池104,电控箱101与电池104电连接,电动推杆301、转向舵机302、风向传感器102、风速传感器103及手轮伺服电机405均与电控箱101信号连接。
40.所述连接绳403优选为尼龙绳。机架主体优选铝合金材质。
41.手轮伺服电机405直连减速器406,通过手轮404轴直连手轮404,且手轮伺服电机405、减速器406及手轮404均位于机架主体内部。
42.电控箱101内还设置有其它所需传感器,如gps、imu、温湿度传感器等。
43.四组悬架2分别安装于机架1的左前、右前、左后、右后侧。
44.根据实际需要,电动推杆301的数量可以为一个、两个或多个。
45.本技术的雪地漫游机器人具有自主巡航能力,利用其自身的定位系统和环境感知系统,可以预先规划好路线,通过无线传输给机器人控制。机器人可自主根据地面环境情况和实时风向,计算最优路径和风帆402角度,自动移动到指定的位置。
46.本技术采用风能驱动,风能是可再生能源,节能环保,不产生污染,可长时间利用其进行工作。利用风能直接驱动,能量利用率高。使用清洁能源,拥有节能环保、可持续工作时间长、活动灵活等特点,可应用于雪地运输、极地科考等领域。
47.该机器人可以通过传感器,自动改变风帆402的角度,实现自动控制,并保证风帆402角度始终处于风能利用的最优状态。
48.采用四块雪橇与地面接触,阻力小,接触面积大,不易陷入雪中,拥有更好的路面
适应性和通过性。
49.转向机构3可以改变前方雪橇的方向进行转向,还可以实现犁式刹车。机构简单,能量损坏小,易于控制。
50.所述主架体包括上叉臂201、下叉臂202、减震器203以及雪橇立轴204,其中上叉臂201、下叉臂202以及减震器203的一端均与机架主体铰接,上叉臂201及下叉臂202的另一端均与雪橇立轴204铰接,减震器203的另一端与下叉臂202铰接,雪橇板205与雪橇立轴204的下端铰接。如此设计,主架体采用双叉臂结构,雪橇板205可绕雪橇立轴204底部旋转,以更好的适应地形。同时拥有良好的避震效果,可以保证机器人机身的平稳。通过本技术的主架体结构,雪橇板205可以在转向机构3的作用下实现相对于机架1的位置改变,以适应地形。转向连杆305的另一端通过万向节连接至雪橇立轴204上。
51.每组相对位于机架1两侧的两个雪橇立轴204呈八字形布置。如此设计,雪橇立轴204与竖直方向呈一定夹角。在转向时,通过与地面形成一定的接触角,以提供更好的侧向支持力。其主要作用为:在转向时让机器人沿雪橇板205的导向旋转,防止侧滑;在刹车时提供更大的阻力,帮助减速。
52.所述定滑轮组包括第一至第三定滑轮,所述第一定滑轮407通过支杆安装至机架1的后方,第二定滑轮408安装在风帆402底部,第三定滑轮409安装至机架主体内部,连接绳403依次绕设在第一至第三定滑轮上。根据实际需要,第二定滑轮408的数量可以为一个、两个或多个。
53.所述电控箱101、风向传感器102及风速传感器103均位于机架主体的前部。
54.所述机架1还包括安装在机架主体上的直线导轨105,所述电池104左右滑动安装在直线导轨105上。在风力较大时,考虑到机器人风帆402会受到很大的侧向力,可能导致倾覆等危险状况。本发明将电池104安装在直线导轨105上。在直线导轨105电机驱动下,电池104可沿机器人左右方向运动。根据相关传感器采集到的数据,可以控制电池104移动到与风力相反的方向,以平衡机器人重心。若风力超出电池104所能平衡的范围,手轮伺服电机405立刻释放所有的连接绳403,使风帆402完全自由,在风的作用下旋转到与风向平行的角度。此时风帆402受力为零,不再产生倾覆力矩。
55.所述机架主体上还设置有货仓106。如此设计,所述货仓106布置在机架1的后部,可用于运输货物或安装科研仪器。
56.连接板307的底部通过两组导轨滑块306组件作为导向元件实现前后滑动。
57.工作原理:
58.转向:需要改变机器人前进方向时,电动推杆301保持静止,转向舵机302改变角度(即转向),使齿轮303带动齿条304沿左或右方向平动。齿条304两端的转向连杆305带动雪橇立轴204绕轴线旋转。位于机架1两侧的雪橇立轴204旋转方向一致。机构运动简图如图8中的a)图及c)图所示。
59.刹车:在风动力驱动时,如需降低机器人行驶速度,可以将电动推杆301置于伸出状态,电动推杆301末端的连接板307带动转向舵机302、齿轮303、齿条304整体向前移动。两侧的转向连杆305做平面运动,雪橇立轴204绕轴线旋转。此时两侧雪橇立轴204的旋转方向相反,均为向内侧旋转。机构运动简图如图8中的b)图所示。这种刹车方式为模仿滑雪运动中“犁式刹车”原理,使雪橇呈内八字形,利用增大和雪地的接触面积和接触角度,产生制动
力进行减速。通过控制电动推杆301伸出的长度可以控制制动力的大小。
60.风动力驱动:雪地漫游机器人可以利用风帆402收集风能,为机器人直接提供驱动力。机器人读取风向传感器102和风速传感器103的数据,与自身前进方向对比,根据风帆402驱动理论,计算出风帆402的最佳角度。手轮伺服电机405带动手轮404转动,改变缠绕在手轮404上的连接绳403长度,同时也改变了连接绳403自由端的长度。风帆402一侧套在桅杆401上,风帆402中部受风的推力,风帆402另一侧受连接绳403的拉力,即可实现受力平衡,使风帆402角度确定。桅杆401和机架1上的定滑轮,受风帆402的反作用力,为机器人提供驱动力。当风向改变时,旋转手轮404即可改变风帆402角度,使风帆402一直处于对机器人前进最为有利的位置。如图9所示。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。