技术特征:
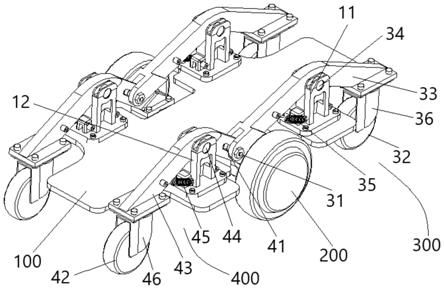
1.一种机器人底盘,其特征在于,包括:固定底盘,包括相互间隔设置的第一耳座及第二耳座;第一运动模块,包括第一支撑轮和第一连杆,所述第一支撑轮转动连接在所述第一连杆的一端,所述第一连杆的中部与所述第一耳座转动连接;第二运动模块,包括第二支撑轮和第二连杆,所述第二支撑轮转动连接在所述第二连杆的一端,所述第二连杆的中部与所述第二耳座转动连接;以及驱动模块,包括驱动轮,所述驱动轮与所述第二连杆的另一端转动连接;所述第一连杆的另一端与第二连杆的另一端滑动且转动配合连接;所述固定底盘通过所述第一耳座及所述第二耳座被所述第一运动模块及所述第二运动模块支撑并带动移动。2.如权利要求1所述的机器人底盘,其特征在于,当所述驱动轮遇到地面障碍物相对地面向上运动时,所述第一连杆的另一端相对所述第二连杆的另一端滑动,使得所述第一支撑轮及所述第二支撑轮均与地面支撑。3.如权利要求2所述的机器人底盘,其特征在于,所述第二连杆的另一端上设有滑槽,所述第一连杆的另一端设有滑杆,所述滑杆设置在所述滑槽内,当所述驱动轮及所述第一支撑轮、所述第二支撑轮位于同一高度的地面上时,所述滑杆位于所述滑槽的中部。4.如权利要求3所述的机器人底盘,其特征在于,当所述第一支撑轮遇到高于地面的障碍物向上运动时,所述滑杆在所述滑槽内滑动,使得所述驱动轮及所述第二支撑轮均与地面接触;和/或当所述第二支撑轮遇到高于地面的障碍物向上运动时,所述滑杆在所述滑槽内滑动,使得所述驱动轮及所述第一支撑轮均与地面接触。5.如权利要求1所述的机器人底盘,其特征在于,所述驱动模块还包括驱动电机,所述驱动轮的数量为两个,所述驱动轮均与所述驱动电机连接,所述驱动轮分别设置在所述固定底盘的左右两侧。6.如权利要求1所述的机器人底盘,其特征在于,所述驱动轮设于所述第一支撑轮及所述第二支撑轮之间,使得当所述第一支撑轮遇到高于地面的障碍物向上运动时,所述第一支撑轮相对地面翘起的角度大于所述固定底盘相对地面翘起的角度;和/或当所述第二支撑轮遇到高于地面的障碍物向上运动时,所述第二支撑轮相对地面翘起的角度大于所述固定底盘相对地面翘起的角度。7.如权利要求1至6中任一项所述的机器人底盘,其特征在于,所述第一支撑轮、所述第一连杆、所述第二支撑轮和所述第二连杆的转动中心轴线相互平行。8.如权利要求1至6中任一项所述的机器人底盘,其特征在于,所述第一运动模块还包括第一弹簧,所述第一弹簧连接所述固定底盘和所述第一连杆。9.如权利要求1至6中任一项所述的机器人底盘,其特征在于,所述第二运动模块还包括第二弹簧,所述第二弹簧连接所述固定底盘和所述第二连杆。10.一种机器人,其特征在于,包括如权利要求1至9中任一项所述的机器人底盘。
技术总结
本申请提供了一种机器人底盘和机器人,包括固定底盘、第一运动模块、第二运动模块和驱动模块,其中第一运动模块包括第一支撑轮和第一连杆,第二运动模块包括第二支撑轮和第二连杆,第一支撑轮转动连接在第一连杆的一端,第一连杆的中部与固定底盘转动连接;第二支撑轮转动连接在第二连杆的一端,第二连杆的中部与固定底盘转动连接;驱动模块包括驱动轮,驱动轮与第二连杆的另一端转动连接。本申请提供的机器人底盘和机器人将驱动轮与支撑轮联动,当机器人越障时,支撑轮与固定底盘、驱动轮相对运动,避免了单侧支撑轮抬起导致驱动轮与地面静摩擦减小而悬空或打滑的现象,提高了机器人的越障能力。的越障能力。的越障能力。
技术研发人员:张云龙 马学思 杨伟聪 林佳福
受保护的技术使用者:奥佳华智能健康科技集团股份有限公司
技术研发日:2022.02.11
技术公布日:2022/6/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。