一种透镜系统、红外接收模组及3d相机
技术领域
1.本实用新型属于光学器件技术领域,尤其涉及一种透镜系统、红外接收模组及3d相机。
背景技术:
2.机器视觉是用机器代替人眼来做测量和判断。机器视觉系统是指通过机器视觉产品(即图像摄取装置,分cmos和ccd两种)将被摄取目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号。
3.在相关技术中,会采用3d相机来实现机器视觉,3d相机通常采用透镜系统接收目标的光信号,然而常规的透镜系统结构复杂且光学畸变效果不佳,用于3d相机接收光信号时,算法计算矫正变形后的精度不高。
技术实现要素:
4.本实用新型的技术目的在于提供一种透镜系统、红外接收模组及3d相机,透镜系统结构简单,且光学畸变符合布朗模型,用于3d相机光信号接收时能够提升算法计算矫正变形后的精度。
5.为解决上述技术问题,本实用新型是这样实现的,提供一种透镜系统,自物侧至像侧依次包括具有正光焦度的第一透镜、具有正光焦度的第二透镜、具有负光焦度的第三透镜以及具有正光焦度的第四透镜;所述第一透镜的物侧面为凸面,像侧面为凹面;所述第二透镜的物侧面为凹面,像侧面为凸面;所述第三透镜的物侧面为凹面,像侧面为凸面;所述第四透镜的物侧面的靠近光轴处为凸面,像侧面的靠近光轴处为凹面。
6.进一步地,所述透镜系统还包括设置于所述第一透镜和所述第二透镜之间的光阑。
7.进一步地,所述透镜系统还包括设置于所述第四透镜的远离所述第三透镜的一侧的光电传感器。
8.进一步地,所述透镜系统还包括设置于所述第四透镜和所述光电传感器之间的滤光片。
9.进一步地,所述第一透镜、所述第二透镜、所述第三透镜和所述第四透镜均采用塑料非球面透镜,各所述透镜的两面均为非球面。
10.进一步地,所述第一透镜物侧面的曲率半径为r1,像侧面的曲率半径为r2;所述第二透镜物侧面的曲率半径为r3,像侧面的曲率半径为r4;所述第三透镜物侧面的曲率半径为r5,像侧面的曲率半径为r6;所述第四透镜物侧面的曲率半径为r7,像侧面的曲率半径为r8;且满足下列关系式:
11.0.25<r1/r2<0.35;
12.2<r3/r4<3;
13.0.5<r5/r6<1;
14.0.7<r7/r8<1。
15.进一步地,所述透镜系统的有效焦距为f,所述第一透镜的有效焦距为f1,所述第二透镜的有效焦距为f2,所述第三透镜的有效焦距为f3,所述第四透镜的有效焦距为f4,所述第一透镜和所述第二透镜的组合焦距为f12,所述第二透镜和所述第三透镜的组合焦距为f23,所述第三透镜和所述第四透镜的组合焦距为f34,所述第一透镜、所述第二透镜和所述第三透镜的组合焦距为f123,所述第二透镜、所述第三透镜和所述第四透镜的组合焦距为f234,且满足如下关系式:
16.1.5<f1/f<2;
17.3.5<f2/f<4.5;
[0018]-7.5<f3/f<-5.5;
[0019]
2<f4/f<3.5;
[0020]
2.5<f12<3;
[0021]
25<f23<35;
[0022]
5.5<f34<6.5;
[0023]
3.5<f123<4.5;
[0024]
3.5<f234<4.5。
[0025]
进一步地,所述第一透镜的透镜材料在d光的折射率为nd1,阿贝数为vd1;所述第二透镜的透镜材料在d光的折射率为nd2,阿贝数为vd2;所述第三透镜的透镜材料在d光的折射率为nd3,阿贝数为vd3;所述第四透镜的透镜材料在d光的折射率为nd4,阿贝数为vd4;且满足如下关系式:
[0026]
1.60<nd1<1.70;1.5<nd2<1.6;1.60<nd3<1.70;1.60<nd4<1.70;
[0027]
18<vd1<25;50<vd2<60;18<vd3<25;18<vd4<25。
[0028]
进一步地,提供一种红外接收模组,包括如上任意一项所述的透镜系统。
[0029]
进一步地,提供一种3d相机,包括如上所述的红外接收模组。
[0030]
本实用新型中透镜系统、红外接收模组及3d相机与现有技术相比,有益效果在于:
[0031]
本方案的透镜系统用于红外光接收,具有结构简单、光学性能优良、厚度薄、大广角的特点,且光学畸变符合布朗模型,用于3d相机光信号接收时能够提升算法计算矫正变形后的精度。
附图说明
[0032]
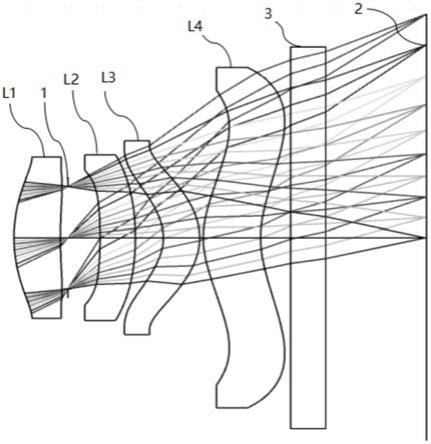
图1是本实用新型实施例中透镜系统的结构示意图;
[0033]
图2是本实用新型具体实施示例的透镜系统的调制传递函数(mtf)示意图;
[0034]
图3是本实用新型具体实施示例的透镜系统常温下的系统离焦状况(through focus mtf);
[0035]
图4是本实用新型具体实施示例的透镜系统常温下的场曲(field curvature)和畸变(distortion)曲线;
[0036]
图5是本实用新型具体实施示例的常温下的各视场主光线及上下光线角度曲线;
[0037]
图6是本实用新型具体实施示例的畸变曲线布朗模型检验状况。
[0038]
在附图中,各附图标记表示:l1、第一透镜;l2、第二透镜;l3、第三透镜;l4、第四透
镜;1、光阑;2、光电传感器;3、滤光片。
具体实施方式
[0039]
为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
[0040]
实施例:
[0041]
在本实施例中,结合图1,提供一种透镜系统,自物侧至像侧依次包括具有正光焦度的第一透镜l1、具有正光焦度的第二透镜l2、具有负光焦度的第三透镜l3以及具有正光焦度的第四透镜l4;第一透镜l1的物侧面为凸面,像侧面为凹面;第二透镜l2的物侧面为凹面,像侧面为凸面;第三透镜l3的物侧面为凹面,像侧面为凸面;第四透镜l4的物侧面的靠近光轴处为凸面,像侧面的靠近光轴处为凹面。
[0042]
采用上述方案的透镜系统用于红外光接收,具有结构简单、光学性能优良、厚度薄、大广角的特点,且光学畸变符合布朗模型,用于3d相机光信号接收时能够提升算法计算矫正变形后的精度。
[0043]
在本实施例中,透镜系统还包括设置于第一透镜l1和第二透镜l2之间的光阑1,其中光阑1可以采用孔径光阑。本方案的透镜系统中将光阑1设置于第一透镜l1和第二透镜l2之间,可以在保证成像质量的前提下,使整个光学系统的厚度减小,结构匀称。在一些实现方式中,光阑1也可以设置在第二透镜l2和第三透镜l3之间,或者设置在第三透镜l3和第四透镜l4之间。
[0044]
透镜系统还包括设置于第四透镜l4的远离第三透镜l3的一侧的光电传感器2,透镜系统还包括设置于第四透镜l4和光电传感器2之间的滤光片3。在本实施例中,光电传感器2采用国内知名厂商开发的红外专用cmos(complementary metal-oxide-semiconductor:互补金属氧化物半导体)图像传感器,其分辨率为1.3m,像素大小为2.7um,cra(chief ray angle:从镜头的传感器一侧,可以聚焦到像素上的光线的最大角度)为25度,并且采用cob(chip on board:板上芯片封装)封装工艺,有利于减小光学系统的体积,并且提高光学性能,容易制造。
[0045]
在本实施例中,为了达到良好的像差矫正以及成像效果,保证结构紧凑,同时获得稳定的图像,透镜系统满足如下条件:
[0046]
0.25<r1/r2<0.35;
[0047]
2<r3/r4<3;
[0048]
0.5<r5/r6<1;
[0049]
0.7<r7/r8<1;
[0050]
其中,第一透镜l1物侧面的曲率半径为r1,像侧面的曲率半径为r2;第二透镜l2物侧面的曲率半径为r3,像侧面的曲率半径为r4;第三透镜l3物侧面的曲率半径为r5,像侧面的曲率半径为r6;第四透镜l4物侧面的曲率半径为r7,像侧面的曲率半径为r8。
[0051]
优选的,透镜系统还满足如下条件:
[0052]
1.5<f1/f<2;
[0053]
3.5<f2/f<4.5;
[0054]-7.5<f3/f<-5.5;
[0055]
2<f4/f<3.5;
[0056]
2.5<f12<3;
[0057]
25<f23<35;
[0058]
5.5<f34<6.5;
[0059]
3.5<f123<4.5;
[0060]
3.5<f234<4.5;
[0061]
其中,透镜系统的有效焦距为f,第一透镜l1的有效焦距为f1,第二透镜l2的有效焦距为f2,第三透镜l3的有效焦距为f3,第四透镜l4的有效焦距为f4,第一透镜l1和第二透镜l2的组合焦距为f12,第二透镜l2和第三透镜l3的组合焦距为f23,第三透镜l3和第四透镜l4的组合焦距为f34,第一透镜l1、第二透镜l2和第三透镜l3的组合焦距为f123,第二透镜l2、第三透镜l3和第四透镜l4的组合焦距为f234。
[0062]
更优选的,透镜系统还满足如下条件:
[0063]
1.60<nd1<1.70;1.5<nd2<1.6;1.60<nd3<1.70;1.60<nd4<1.70;
[0064]
18<vd1<25;50<vd2<60;18<vd3<25;18<vd4<25;
[0065]
其中,第一透镜l1的透镜材料在d光(黄光,587nm)的折射率为nd1,阿贝数为vd1;第二透镜l2的透镜材料在d光的折射率为nd2,阿贝数为vd2;第三透镜l3的透镜材料在d光的折射率为nd3,阿贝数为vd3;第四透镜l4的透镜材料在d光的折射率为nd4,阿贝数为vd4。
[0066]
在本实施例中,第一透镜l1、第二透镜l2、第三透镜l3和第四透镜l4均采用塑料非球面透镜,各透镜的两面均为非球面。第一透镜l1为弯月型正透镜,第二透镜l2为弯月型正透镜,第三透镜l3为薄弯月型负透镜,第四透镜l4为波浪形正透镜,并且,第一透镜l1、第三透镜l3和第四透镜l4均为高折射率材料,第二透镜l2为普通折射率材料。
[0067]
上述各方案的透镜系统具有超广角、低成本、小体积、高性能的特点,同时兼备结构简单、容易制造的优势,并且优化了光学设计mtf(modulation transfer function:调制传递函数)指标,光学畸变符合布朗模型,利于应用在3d接收相机时,算法计算矫正变形,提升精度。
[0068]
进一步地,提供一种红外接收模组,包括前述任意一种透镜系统。进一步地,提供一种3d相机,包括前述的红外接收模组。由于红外接收模组中包含前述的透镜系统,3d相机包含该红外接收模组,基于透镜系统的前述优势,可以使相机获得质量稳定且适于算法计算矫正变形的图像,从而提升3d相机的拍摄质量。
[0069]
本技术中,所有透镜的表面都由非球面构成,设光轴方向为z,表面曲率半径为r,表面与光轴正交的高度为y,圆锥系数为k,非球面系数为a4,a6,a8,a10,a12,a14,a16时,非球面通过下面的数学式表示:
[0070][0071]
下面给出一个透镜系统具体实施示例的参数设计示例,该系统的最大视场角fov为89
°
,焦距:efl=2.3mm,光圈:fno=2.0,光学总长为:ttl=3.5mm,最大半像高为2.5mm,适用于925-955nm红外接收光波段。应当理解,本具体实施示例的参数设置仅用于示意,并不用于限制本技术的保护范围。
curvature)和畸变(distortion)示意图如图4所示;本实用新型上述具体实施示例的透镜系统常温下的各视场主光线及上下光线角度曲线图如图5所示;本实用新型上述具体实施示例的透镜系统的畸变曲线布朗模型检验状况如图6所示。
[0080]
在上述实施例中,对各个实施例的描述都各有侧重,某个实施例中没有详述或记载的部分,可以参见其它实施例的相关描述。
[0081]
以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。