1.本实用新型涉及炮泥包装机械,特别是一种用于炮泥的抓运机械手装置。
背景技术:
2.炮泥是一种耐火材料,广泛应用于钢铁、有色金属、玻璃、水泥、陶瓷、石化等领域。炮泥由挤压机挤出后用包装机进行切段并包装,包装后码放到包装袋或包装箱,目前采用人工进行码放,效率低,劳动强度大,采用机械人成本高,机器人的机械手只能搬运一块炮泥段。授权公告号为 cn212497756u中国实用新型专利公开了一种双夹头可旋转机械手和使用双夹头可旋转机械手的机械手设备,该实用新型的机械手结构复杂、成本高。
技术实现要素:
3.本实用新型旨在解决上述技术问题,而提供一种结构简单的用于炮泥的抓运机械手装置。
4.本实用新型解决其技术问题,采用的技术方案是:
5.一种用于炮泥的抓运机械手装置,包括机械臂、机械手,机械手包括连接板,连接板水平固接于机械臂的下端,连接板的一侧设有第一指板,连接板的另一侧铰接与第一指板相对的第二指板,第一指板与第二指板之间设有用于指板开合的驱动件。
6.采用上述技术方案的本实用新型与现有技术相比,有益效果是:
7.结构简单,抓取可靠,成本低,指板的数量调整方便,通过增加第二指板的数量能够一次抓取多段炮泥段。
8.进一步的, 本实用新型的优化方案是:
9.驱动件为气缸,气缸的缸体固接于第一指板的内侧面,气缸的活塞杆通过连杆与第二指板铰接。
10.第一指板与连接板固接或铰接。
11.第一指板为一个或多个,第二指板为一个或多个。
12.第一指板和第二指板为平板。
13.第一指板和第二指板为弧形结构,两个指板的开口相对。
14.第一指板和第二指板为平板,第一指板和第二指板的内侧面分别固接开口相对的弧形板。
15.第一指板和第二指板为平板,第一指板和第二指板的内侧面分别固接扁盒形的气囊。
16.第二指板的内侧面固接减震垫。
17.机械臂竖向安装在升降机构上,升降机构安装在纵向移动机构上,纵向移动机构安装在横向移动机构上,横向移动机构安装在机架的顶端。
附图说明
18.图1是本实用新型实施例一的主视图;
19.图2是图1的俯视图;
20.图3是图1的左视图;
21.图4是连接板与第一指板铰接示意图;
22.图5本实用新型实施例二的主视图;
23.图6是图5的a-a剖视图;
24.图7是本实用新型实施例三的主视图;
25.图8是图7的b-b剖视图;
26.图9的本实用新型实施例四的主视图;
27.图10是图8的c-c剖视图;
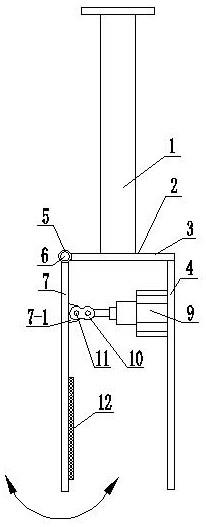
28.图11是机械手与机架连接示意图。
29.图中:机械臂1;机械手2;连接板3;第一指板4;固定套管5;铰接轴6;第二指板7;耳座7-1;活动套管8;气缸9;连杆10;销轴11;减震垫12;滑杆导座组件13;滑杆13-1;导座13-2;第一导轨滑块组件14;第二导轨滑块组件15;机架16;凸形块17;凹形块18;弧形板19;气囊20。
具体实施方式
30.下面结合附图和实施例进一步详述本实用新型。
31.参见图 1-图3,实施例一是一种用于方形或矩形炮泥的抓运机械手装置,由机械臂1和机械手2等构成,机械臂1为方管,其竖向设置,其下端安装机械手2。机械手2由连接板3、第一指板4和第二指板7等构成,连接板3为长条形,其均布多个矩形的减重孔,其水平焊接在机械臂1的下端,连接板3的外侧面焊接与其垂直的第一指板4,第一指板4为长方形,连接板3的内侧面铰接五个长方形的第二指板7,第一指板4和第二指板7均为平板,连接板3的内侧面间隔焊接6个轴线水平的固定套管5,第二指板7的上端焊接活动套管8,活动套管8置于两个固定套管5之间,活动套管8与固定套管5通过铰接轴6连接,连接板3设有与活动套管8相对的缺口结构。第一指板4的内侧面的上部安装五个与第二指板7相对的气缸9,气缸9水平设置,气缸9还可采用电磁铁。气缸9的活塞杆通过销轴11与连杆10的一端铰接,连杆10的另一端通过销轴11与耳座7-1铰接,耳座7-1焊接在第二指板7的内侧面,气缸9控制第二指板7的开合。每个第二指板7与第一指板4配合抓取一段炮泥,根据包装箱或吨袋的尺寸选取第二指板7的数量,为了增加第二指板7与炮泥的摩擦力,第二指板7的内侧面安装减震垫12。第一指板4也可为分体结构,第一指板4和第二指板7成对布置。气缸9还可采用其两端分别与第一指板4和第二指板7铰接的连接结构。第一指板4连接板3还可采用铰接的连接结构(图4所示)。
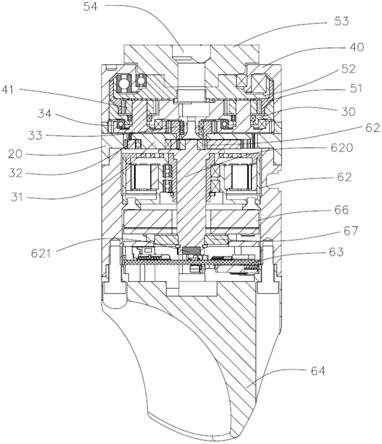
32.参见图5、图6,实施例二是一种用于圆柱形炮泥的抓运机械手装置,第一指板4和第二指板7的截面为圆弧形,第一指板4和第二指板7开口相对。气缸9的缸体与第一指板4之间安装凸形块17,第一指板4的外侧安装与凸形块17相对的凹形块18,气缸9、第一指板4、凸形块17和第二指板7之间通过螺栓固定。
33.参见图7、图8,实施例三是一种用于圆柱形炮泥的抓运机械手装置,第一指板4和
第二指板7为平板,第一指板4和第二指板7的内侧面的中下部分别焊接开口相对的弧形板19,弧形板19的两侧与指板之间焊接筋板,弧形板19用于将轴向竖向设置的圆柱形炮泥抓起。
34.参见图图9、图10,实施例四是一种用于圆柱形炮泥的抓运机械手装置,第一指板4和第二指板7为平板,第一指板4和第二指板7内侧中下部分别安装扁盒形的气囊21,两个气囊21的相对面设有柱形的凸出部,第一指板4和第二指板7夹紧圆柱形炮泥时,气囊21受压力变形,其与炮泥段接触的弧面两侧将炮泥抱紧,凸出部增大摩擦力,在将炮泥抓起的同时防止炮泥变形。
35.本实用新型的机械臂1由升降机构驱动(图11所示),升降机构为滑杆导座组件13,机械臂1的上端焊接连接板,连接板安装在竖向的滑杆13-1的下端,导座13-2驱动滑杆13-1上下移动, 导座13-2由纵向移动机构驱动,纵向移动机构为第一导轨滑块组件14,导座13-2与第一导轨滑块组件14的第一滑块连接,纵向移动机构由横向移动机构驱动,横向移动机构为两个平行的第二导轨滑块组件15,第一导轨的两端分别安装在两个第二导轨滑块组件15的第二滑块上,两个第二导轨安装在机架16的顶端,机架16为框架结构,升降机构、纵向移动机构和横向移动机构均设有伺服电机,伺服电机由控制系统控制。
36.本实用新型的工作过程是:横向驱动机构驱动纵向驱动机构到输送带上方,纵向驱动机构调整升降机构的位置,升降机构驱动机械臂向下运动,机械手位于5段炮泥段的上方,第一指板4和第二指板7分别位于炮泥段的两侧,气缸9的活塞杆回缩带动第二指板7将炮泥段夹紧,各个机构反方向运动,将炮泥段码放到墩袋或包装箱内,气缸9的活塞杆伸出,第二指板7松开,升降机构驱动机械手上升,开始下一个工作循环。
37.以上所述仅为本实用新型较佳可行的实施例而已,并非因此局限本实用新型的权利范围,凡运用本实用新型说明书及附图内容所作的等效结构变化,均包含于本实用新型的权利范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。