1.本发明属于工业机械手技术领域,具体涉及一种机械手手指及机械手。
背景技术:
2.随着人工智能技术的发展,机器人开始逐渐代替人类完成复杂、危险的作业任务,这些任务的完成需要机器人在作业过程中对目标物和环境有良好的交互能力。机器人与目标物和环境的交互主要通过末端执行器实现,多指机械手自由度高、灵活性强,作为机器人末端执行器的一种,能胜任多种操作任务,在工业、医疗等领域已经取得了一定的应用。
3.现有的多指机械手如东京大学研制的三指机械手和intel中国实验室的eagleshoal机械手通过全驱动手指和可运动的手掌实现抓取姿态变换和稳定抓持,但这类机械手的手掌电机的移动和控制严重受限,其抓取姿态变换通常比较固定,难以像人手一样灵活变换抓取方式,对物体的抓持仍然以规则物体为主,对形状不规则物体的泛化能力有限。
技术实现要素:
4.有鉴于此,本发明提供了一种机械手手指及机械手,以便解决上述提到的技术问题。
5.本发明的技术方案是:
6.一种机械手手指,包括:
7.依次设置的第一机构、第二机构和第三机构,所述第一机构和第二机构之间设置有用于连接第一机构和第二机构并改变其相对夹角的第一连接机构,所述第二机构和第三机构之间设置有用于连接第二机构和第三机构并改变其相对夹角的第二连接机构;
8.被动弹簧机构,设置在所述第三机构背离第二机构的一端,用于控制机械手手指对物体的接触力。
9.优选的,所述第一机构包括第一壳体,所述第一壳体的其中一端均布设置有两个第一端耳。
10.优选的,所述第一连接机构包括第一驱动电机,所述第一驱动电机设置在所述第一壳体内,所述第一驱动电机的输出轴延伸至所述第一壳体外,位于两个第一端耳之间,所述第一驱动电机的输出轴末端套装固定第一齿轮,所述两个第一端耳之间架设有第一转动轴,所述第一转动轴上套装固定第二齿轮,所述第二齿轮与所述第一齿轮啮合,所述第一转动轴与所述第二机构连接,用于带动所述第二机构同步运动。
11.优选的,所述第二机构包括第二壳体,所述第二壳体的其中一端均布设置有两个第二端耳,另一端固定第一连接件,所述第一连接件与所述第一转动轴套装固定。
12.优选的,所述第二连接机构包括第二驱动电机,所述第二驱动电机设置在所述第二壳体内,所述第二驱动电机的输出轴延伸至所述第二壳体外,位于两个第二端耳之间,所述第二驱动电机的输出轴末端套装固定第三齿轮,所述两个第二端耳之间架设有第二转动
轴,所述第二转动轴上套装固定第四齿轮,所述第四齿轮与所述第三齿轮啮合,所述第二转动轴与所述第三机构连接,用于带动所述第三机构同步运动。
13.优选的,所述第三机构包括指尖部,所述指尖部的其中一端固定第二连接件,所述第二连接件与所述第二转动轴套装固定。
14.优选的,所述被动弹簧机构包括固定在所述指尖部上的安装座,所述安装座内设置有弹性件,所述弹性件的一端与所述安装座固定,另一端与端盖固定连接。
15.一种机械手,包括上述的一种机械手手指。
16.优选的,包括多个所述机械手手指,多个所述机械手手指均布设置在手掌部上。
17.优选的,所述手掌部包括:
18.第三壳体;
19.多个执行器,设置在所述第三壳体内,其输出轴分别延伸至所述第三壳体的一端外部且与各个机械手手指的连接端套装固定,用于驱动各手指运动;
20.工具法兰,设置在所述第三壳体背离机械手手指的一端,其一端与所述第三壳体固定,另一端与扭矩传感器的一端连接;
21.扁平电机,用于驱动整个机械手绕手掌部法向量运动,设置在所述工具法兰背离所述第三壳体的一端,其输出轴与所述扭矩传感器的另一端连接。
22.与现有技术相比,本发明提供的一种机械手手指及机械手,有效增强了机械手在三维空间内的运动能力,可以像人手一样灵活变换抓取方式,对形状不规则物体的适应能力强,此外,由于装置在手指末端安装了被动弹簧机构,通过被动控制降低了机械手对高性能控制算法的需求,实用性强,值得推广。
附图说明
23.图1为本发明的整体结构的示意图;
24.图2为本发明的机械手手指结构的示意图;
25.图3为本发明的被动弹簧机构的示意图;
26.图4为本发明的局部结构的示意图一;
27.图5为本发明的局部结构的示意图二;
28.图6为本发明的局部结构的示意图三;
29.图7为本发明的局部结构的示意图四;
30.图8为本发明的局部结构的示意图五。
具体实施方式
31.本发明提供了一种机械手手指及机械手,下面结合图1到图8的示意图,对本发明进行说明。
32.实施例1
33.一种机械手,如图1所示,包括三个多自由度的机械手手指,多个机械手手指均布设置在单自由度的手掌部上。
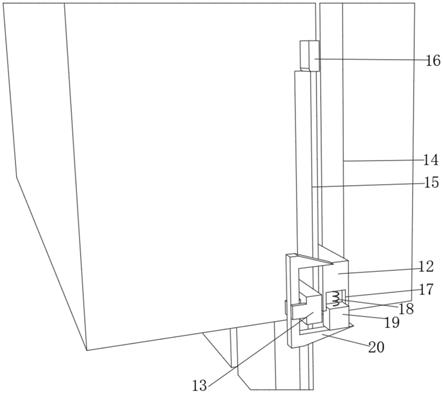
34.进一步的,如图8所示,手掌部的结构具体的包括:第三壳体01、执行器03、扁平电机04、工具法兰06和扭矩传感器05,其中,第三壳体01内有多个执行器03,多个执行器03的
输出轴分别延伸至第三壳体01的一端外部且与各个机械手手指的连接端套装固定,用于驱动各手指运动。具体的,执行器03的输出轴与机械手手指的第一机构11套装固定,并驱动第一机构11绕手掌平面转动。
35.如图8所示,在执行器03上方可选设置端盖02,端盖02与第三壳体01的中间固定,在端盖02与第三壳体01之间形成缝隙,机械手手指的第一机构11上可设置连杆,连杆一端与第一机构11上的第一壳体111固定,另一端卡装在缝隙内,并与执行器03的输出轴固连。
36.在第三壳体01背离机械手手指的一端设工具法兰06,工具法兰06的一端与第三壳体01固定,另一端与扭矩传感器05的一端连接。
37.在工具法兰06背离第三壳体01的一端设扁平电机04,扁平电机04的输出轴与扭矩传感器05的另一端连接。扁平电机04用于驱动整个机械手绕手掌部法向量运动,以进一步增强多指机械手在执行操作如拧螺栓等连续旋转类操作的灵活性,扭矩传感器05用于测量扁平电机04的输出转矩,从而确定机械手整体转动时的扭矩。
38.每一个机械手手指主要包含四个机构和两个连接机构。机械手手指与执行器03的输出轴固连,在执行器03的驱动下执行相应的动作。
39.其中,四个机构分别为第一机构11、第二机构13、第三机构15和被动弹簧机构16,第一机构11和第二机构13用第一连接机构12连接,第二机构13和第三机构15用第二连接机构14连接。
40.一种机械手手指,如图1和图2所示,包括依次设置的第一机构11、第二机构13和第三机构15,第一机构11和第二机构13之间设置有用于连接第一机构11和第二机构13并改变其相对夹角的第一连接机构12,第二机构13和第三机构15之间设置有用于连接第二机构13和第三机构15并改变其相对夹角的第二连接机构14;被动弹簧机构16,设置在第三机构15背离第二机构13的一端,用缓冲和控制机械手手指对物体的接触力。
41.进一步的,如图1和图5所示,第一机构11的结构具体的包括第一壳体111和第一端耳113,在第一壳体111的其中一端均布设置有两个第一端耳113,两个第一端耳113的一端与第一壳体111固定连接,构成两侧对开结构。
42.进一步的,如图1、图5和图4所示,第一连接机构12的结构具体的包括:第一驱动电机112、第一齿轮121、第一转动轴123和第二齿轮122。其中,第一驱动电机112设置在第一壳体111内,第一驱动电机112的输出轴延伸至第一壳体111外,且位于两个第一端耳113之间,第一驱动电机112的输出轴末端套装固定第一齿轮121,两个第一端耳113之间通过轴承架设有水平设置的第一转动轴123,第一转动轴123上套装固定第二齿轮122,第二齿轮122与第一齿轮121啮合,第一转动轴123与第二机构13连接,在第一驱动电机112启动后,可以带动第一齿轮121转动,从而同步的带动第二齿轮122和第一转动轴123转动,实现第二机构13同步运动,第一连接机构12以第二齿轮122与第一齿轮121构成的齿轮组为核心,驱动第二机构13绕第一转动轴123转动。
43.进一步的,如图1和图6所示,第二机构13的结构具体的包括:第二壳体131、第二端耳133和第一连接件134,其中,第二壳体131的其中一端均布设置有两个第二端耳133,两个第二端耳133构成两侧对开结构,另一端固定第一连接件134,第一连接件134与第一转动轴123套装固定。
44.进一步的,如图1和图6所示,第二连接机构14的结构具体的包括:第二驱动电机
132、第三齿轮141、第二转动轴143和第四齿轮142,其中,第二驱动电机132设置在第二壳体131内,第二驱动电机132的输出轴延伸至第二壳体131外,位于两个第二端耳133之间,第二驱动电机132的输出轴末端套装固定第三齿轮141,两个第二端耳133之间架设有第二转动轴143,第二转动轴143上套装固定第四齿轮142,第四齿轮142与第三齿轮141啮合,第二转动轴143与第三机构15连接,在第二驱动电机132启动后,可以带动第三齿轮141转动,从而同步的带动第四齿轮142和第二转动轴143转动,实现第三机构15的同步运动。第二连接机构14以第四齿轮142与第三齿轮141构成的齿轮组为核心,驱动第三机构15绕第二转动轴143转动。
45.进一步的,如图1和图7所示,第三机构15的结构具体的包括:指尖部151和第二连接件152,其中,指尖部151的其中一端固定第二连接件152,第二连接件152与第二转动轴143套装固定。
46.进一步的,如图3所示,被动弹簧机构16的结构具体的包括:安装座162、弹性件161和端盖163,其中,安装座162粘附固定在指尖部151端面上,安装座162内设置有多个弹性件161,每个弹性件161的一端与安装座162固定,另一端与端盖163固定连接,弹性件161发生形变的同时带动端盖163同步运动。
47.其中,弹性件161可以是板簧或者弹簧的其中一种。
48.被动弹簧机构16主要用于控制机械手对物体的接触力,降低机械手操作时对精度的需求,将主动力控算法转换为基于弹簧机构的被动力控,进而简化控制算法的复杂性。
49.本发明提供的一种机械手手指及机械手,有效增强了机械手在三维空间内的运动能力,可以像人手一样灵活变换抓取方式,对形状不规则物体的适应能力强,此外,由于装置在手指末端安装了被动弹簧机构,通过被动控制降低了机械手对高性能控制算法的需求,实用性强,值得推广。
50.以上公开的仅为本发明的较佳具体实施例,但是,本发明实施例并非局限于此,任何本领域技术人员能思之的变化都应落入本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。