1.本发明涉及一种在电梯的升降通道内进行作业的电梯作业装置。
背景技术:
2.通常,在电梯的升降通道内设置有对电梯轿厢和平衡重的移动进行引导的导轨。导轨采用支架固定在墙面或钢骨上。以往,导轨的固定作业在作业者设置于升降通道内的可升降的作业平台或设置于升降通道内的脚手架上,使用锤钻等的各种作业工具来进行。近年来,为了提高作业效率,考虑使用机器人进行导轨的安装作业。
3.作为使用机器人进行导轨的固定作业的技术,例如已知有日本特开平5-105362号公报(专利文献1)所记载的升降通道内作业装置。专利文献1的升降通道内作业装置具有:作业台,其在升降通道内进行升降移动;多个固定装置,其安装于该作业台的侧面;定心台,其配设于作业台上,能够对安装装置、轨道的找正装置以及载置有连接固定装置的水平面水平进行调节;以及位置检测装置,其输出几个阶段精度的位置信号,根据来自该位置检测装置的粗精度的位置信号进行作业台的位置控制,利用高精度的位置信号进行定心台的水平面水平调节控制(参照摘要)。并且,作为未载置在专利文献1的升降通道内作业装置中进行精密定心的定心台的装置,设有收纳在安装装置中使用的工具及安装部件的工具、部件存放装置以及作为工业机器人的供给装置(参照段落0032),供给装置在安装装置与工具、部件存放装置之间动作,将工具或部件从工具、部件存放装置取出,供给安装装置(参照段落0035、0040、0041)。
4.现有技术文献
5.专利文献
6.专利文献1:日本特开平5-105362号公报
技术实现要素:
7.发明所要解决的课题
8.但是,在专利文献1所记载的升降通道内作业装置中,存在大量搭载于作业台上的设备,在设备中也包含重物,因此设备向现场的搬入以及设备向作业台的设置需要大量的劳力。另外,在专利文献1的升降通道内作业装置中,没有考虑将设置在作业台上的供给装置和收纳导轨固定用的部件或工具的工具、部件存放装置设置在作业台上时的安装精度,供给装置和工具、部件存放装置的相对位置发生变化,因此需要在向作业台设置后对供给装置在现场进行示教。
9.本发明的目的在于提供一种电梯作业装置,其能够容易地进行向现场的搬入作业,并且在将装置设置于作业台上之后不需要对供给装置进行现场的示教。
10.用于解决课题的手段
11.为了实现上述目的,本发明的电梯作业装置,其设置于在升降通道内沿上下方向移动的作业平台之上,在升降通道内进行作业,
12.所述电梯作业装置具备:
13.机械臂,其在机械手前端具有工具更换器;
14.工具台,其能够与所述工具更换器结合且载置能够从所述工具更换器分离地设置的多个作业工具;
15.工件台,其载置所述机械臂用于作业的部件;
16.支撑台,其组装有所述机械臂、所述工具台以及所述工件台;
17.工具台对位部,其将所述工具台相对于组装有所述机械臂的所述支撑台的相对位置精度收敛于规定精度;以及
18.工件台对位部,其将所述工件台相对于组装有所述机械臂的所述支撑台的相对位置精度收敛于规定精度,
19.所述工具台对位部及所述工件台对位部将所述规定精度收敛于如下的位置精度:在将所述机械臂、所述工具台、所述工件台以及所述支撑台搬入至升降通道而组装后,不进行所述机械臂与所述工具台及所述工件台的相对位置关系的示教,所述机械臂能够访问载置于所述工具台的作业工具及载置于所述工件台的部件。
20.发明的效果
21.根据本发明,在向现场搬入时,从支撑台卸下工具台、工件台,使其成为紧凑的大小,由此搬入变得容易。而且,由于在搬入后能够以规定的精度安装工具台以及工件台,因此具有能够预先进行工具更换、部件的把持的示教的效果。
22.上述以外的课题、结构及效果将通过以下的实施方式的说明进行阐明。
附图说明
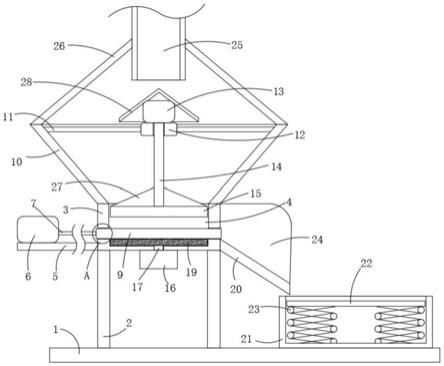
23.图1a是表示本发明的一个实施例所涉及的电梯作业装置的整体结构的立体图。
24.图1b是表示图1a的主轨道的固定结构的一个示例的立体图。
25.图2是表示图1a的电梯作业装置的搭载于作业平台的设备的概略结构的立体图。
26.图3是关于图1a的电梯作业装置,表示搭载于台车的机器人、工具台以及工件台的立体图。
27.图4是表示本发明的一个实施例所涉及的电梯作业装置的控制系统的整体结构的框图。
28.图5是表示本发明的一个实施例所涉及的电梯作业装置中的导轨的安装作业例的流程图。
29.图6是表示在图1a的电梯作业装置中使用的、搭载于台车的机械臂的立体图。
30.图7是表示安装于图1a的电梯作业装置的机械臂的台车的工具台的连接部的例子的立体图。
31.图8是表示在图1a的电梯作业装置中使用的、与工具台的对位部的另一个示例(变更例)的立体图。
32.图中:
[0033]1…
导轨,7
…
作业平台,10
…
电梯作业装置,14
…
第一机械臂,15
…
第二机械臂,30
…
摄像机(机械手前端摄像机),40
…
工具交换器,45
…
支撑台(台车),45a
…
载置机械臂14、15的台车45的支撑面(载置面),48
…
机器人控制器,50
…
工具台,100
…
工件台,170
…
台
车板,180
…
定位销,190
…
工具台板(工件台板),195
…
对位孔,198
…
角形的突出部(嵌合结构),170、190、180、195
…
工具台对位部(工件台对位部),170、180、190、195、198
…
工具台对位部(工件台对位部),180、198、195
…
工具台嵌合部(工件台嵌合部)。
具体实施方式
[0034]
以下,参照图1至图8对本发明的一个实施例所涉及的电梯作业装置进行说明。另外,在各图中对共用的构件标注相同的附图标记,并省略重复的说明。
[0035]
在本实施例中,对在电梯的升降通道内使用支架将沿着升降通道引导电梯轿厢的导轨固定在升降通道内的导轨安装作业装置进行说明。因此,在以下的说明中,有将“电梯作业装置”称为“导轨安装装置”或“电梯导轨安装装置”的情况。本实施例所涉及的电梯作业装置不限于导轨的安装作业,也可以是在升降通道内进行其他作业的装置。
[0036]
参照图1a及图1b,对本实施例的电梯作业装置10的整体结构和导轨1的固定结构进行说明。图1a是表示本发明的一个实施例所涉及的电梯作业装置10的整体结构的立体图。图1b是表示图1a的主轨道1的固定结构的一个示例的立体图。
[0037]
图1a所示的电梯作业装置10进行将电梯的导轨1固定于升降通道壁面的作业(安装作业)。在升降通道内竖立设置有1对主轨道1及1对配重轨道(未图示)。这些轨道的下端固定在设置在升降通道的最下部的底坑内的底坑基座(未图示)上。
[0038]
如图1b所示,主轨道1利用由锚定螺栓1a固定的支架2固定于升降通道壁面。支架2由轨道支架2a和壁支架2b构成。壁支架2b通过锚定螺栓1a固定于升降通道的内壁面,轨道支架2a通过调整螺栓1b固定于壁支架2b。主轨道1通过轨道夹1c及夹紧螺栓1d而固定于轨道支架2a。
[0039]
配重轨道也与主轨道1同样地,通过由轨道支架2a和壁支架2b构成的支架2固定于升降通道的内壁面。
[0040]
另外,在主轨道1与配重轨道接近的情况下,成为利用共用支架3固定双方的轨道的结构。共用支架3也与支架2同样地由轨道支架和壁支架构成,将主轨道1和配重轨道双方固定于升降通道的内壁面。
[0041]
主轨道1和配重轨道通过同样的步骤,通过电梯作业装置10安装在升降通道的壁面上。因此,在不需要特别区分主轨道1和配重轨道的情况下,将两轨道称为导轨1进行说明。
[0042]
在升降通道的最上部设置有吊梁(未图示),在吊梁上设置有2台卷扬机5。2台卷扬机5的钢丝绳6经由吊索与作业平台7连接,通过使卷扬机5动作,能够使作业平台7升降。另外,卷扬机5能够检测旋转角度,能够控制提升量而使作业平台7升降至规定的高度。
[0043]
而且,在升降通道的外侧设置有监视电梯作业装置10的状态的监视用pc500。升降通道内的控制装置与监视用pc500的通信可以是有线的,但如果设为基于无线的通信,则也没有断线等危险而优选。
[0044]
接着,参照图2及图3对搭载于作业平台7的设备的配置及结构进行说明。图2是表示图1a的电梯作业装置10的搭载于作业平台7的设备的概略结构的立体图。图3是表示图1a的电梯作业装置10的搭载于台车45的机器人14、15、工具台50以及工件台100的立体图。另外,在图3中示出了第二机械臂15的结构,但第一机械臂14也与图3所示的第二机械臂15同
样地构成。
[0045]
在作业平台7上配设有多个机械臂。在本实施例中,第一机械臂14和第二机械臂15通过未图示的锚定螺栓固定于作业平台7。第一机械臂14及第二机械臂15在脚部150具有供未图示的锚定螺栓插通的螺栓插通孔150a。另外,电梯作业装置10具有:定心装置16,其把持导轨1并将其定位在规定的位置;统一控制装置17,其对2台机械臂整体进行控制;空气压缩机18;集尘装置19;以及线缆支撑件20。
[0046]
在第一机械臂14及第二机械臂15的机械手前端设置有力觉传感器25、机械手前端摄像机30及工具更换器(工具把持部)40。
[0047]
2台机械臂14、15与机器人控制器48一起搭载于台车45,机器人控制器48控制设置于相同台车45的机械臂14、15的动作。在台车45上组装有用于载置工具的工具台(工具搭载部)50、供锚定螺栓1a(参照图1b)等部件载置的工件台(部件搭载部)100。
[0048]
即,本实施例的电梯作业装置10,支撑第一机械臂14或第二机械臂15、工具台50以及工件台100的支撑台45由能够移动的台车构成,机器人控制器48与机械臂14、15一起支撑于支撑台45。
[0049]
即,本实施例的电梯作业装置10具备:摄像机30,其设置于机械臂14、15的机械手前端;以及机器人控制器48,其控制机械臂14、15的动作。
[0050]
台车45相对于第一机械臂14及第二机械臂15各设置1台,在1台台车45上组装第一机械臂14、工具台50以及工件台100,在其他1台台车45上组装第二机械臂15、工具台50以及工件台100。台车45若与搬运性无关,则不需要是台车,只要是将第一机械臂14或第二机械臂15、工具台50、工件台100组装而构成支撑第一机械臂14或第二机械臂15、工具台50、工件台100的支撑台即可。但是,通过由台车构成支撑台45,组装于台车的第一机械臂14或第二机械臂15的搬运性提高。
[0051]
将包括配设于1个台车45的第一机械臂14、工具台50以及工件台100的单元称作第一机械臂单元,将包含配设于1个台车45的第二机械臂15、工具台50以及工件台100的单元称作第二机械臂单元。即,本实施例的电梯作业装置10具备多个机械臂单元,该机械臂单元包括机械臂14或15、工具台50以及工件台100。
[0052]
工具台50设置于第二机械臂15的旁边,在工具台50上载置有锤钻60、螺母扳手70、磁力手80以及锚定工具90等。这些作业用工具(作业工具)能够与设置于机械臂机械手前端的工具更换器40分离或结合,能够更换第二机械臂15的工具。在第一机械臂14的机械手前端也设置有相同的工具更换器40,能够与第二机械臂15同样地更换设置于第一机械臂14用的工具台50上的工具。
[0053]
锤钻60在向升降通道的壁面开设供用于固定支架2、3的锚定螺栓1a(参照图1b)插入的孔时使用。螺母扳手70进行锚定螺栓1a的螺母的紧固以及轨道夹1c的夹紧螺栓1d(参照图1b)的紧固。
[0054]
磁力手80利用磁力吸附轨道固定用的支架2、3并将其定位在规定的位置。
[0055]
锚定工具90用于将支架固定用的锚定螺栓1a打入在锤钻60开设的孔中。
[0056]
接着,参照图4对电梯作业装置10的控制系统的结构进行说明。图4是表示本发明的一个实施例所涉及的电梯作业装置10的控制系统的整体结构的框图。
[0057]
电梯作业装置10具有作为对装置整体进行控制的作业控制装置的一个示例的plc
(programmable logic controller:可编程逻辑控制器)120、hub110以及监视用pc500。plc120、hub110例如收容于统一控制装置17。
[0058]
设置于第一机械臂14以及第二机械臂15的机械手前端的力觉传感器25通过串行通信与机器人控制器48连接。通过使用力觉传感器25的信号进行力控制,能够进行相对于向升降通道壁面的孔的锚定螺栓1a(参照图1b)的插入。机器人控制器48通过网络与hub110和plc120连接。通过来自plc120的控制,2台机械臂14、15进行规定的作业。整体摄像机130与hub110连接,从作业平台7的上方对作业平台7的整体、即第一机械臂14及第二机械臂15进行作业的区域进行拍摄。通过该影像,能够监视导轨的固定作业(安装作业)。
[0059]
机械手前端摄像机30取得作为作业的对象物的螺栓、支架的孔位置等图像。由机械手前端摄像机30取得的图像由图像处理控制器140处理,作为坐标数据经由hub110传送给机器人控制器48。检测有无载置于工具台50以及工件台100的工具、锚定螺栓等的传感器与plc120的接点输入连接,能够识别当前搭载的工具、锚定螺栓的量。导轨定心装置16与定心装置控制器160连接,定心装置控制器160与plc120连接。通过来自plc120的控制,导轨定心装置16进行导轨1的定位,之后导轨1通过电梯作业装置10固定于升降通道壁面。卷扬机5与plc120连接,通过来自plc120的控制使作业平台7升降至规定的高度。集尘装置19与plc120连接,通过在锤钻60的穿孔时进行动作,能够回收穿孔时的切屑。设置在升降通道的外侧的监视用pc500与hub110连接,能够监视电梯作业装置10整体。
[0060]
通过机械手前端摄像机30对各种作业工具的与工具更换器40的结合部进行拍摄,并进行图像处理,由此能够取得作业工具侧的坐标。在该情况下,虽然能够取得在水平面的坐标,但无法检测作业工具的上下方向位置。但是,通过由力觉传感器25检测工具更换时的工具更换器40与作业工具的接触,能够决定作业工具的结合部与工具更换器40接触的上下方向的位置,因此能够实施工具更换。另外,利用机械手前端摄像机30拍摄锚定螺栓1a,也能够取得锚定螺栓1a在水平面的坐标,上下方向通过力觉传感器25检测锚定螺栓1a与作业工具的接触,从而能够用作业工具把持锚定螺栓1a。
[0061]
另外,将预先示教时的各工具的与工具更换器40的结合部的图像,在将机械臂14、15定位在规定的位置后,通过机械手前端摄像机30获取。在将工具台50固定于台车45后(组装后),同样地取得各工具的与工具更换器40的结合部的图像,取得示教时与固定时(组装时)的坐标值的差分,由此,通过对已经示教的数据加上偏移,能够修正组装时的误差。
[0062]
若具体地进行说明,则机器人控制器48使用第一拍摄结果和第二拍摄结果,根据基于上述第一拍摄结果的工具台50的位置及工件台100的位置、基于上述第二拍摄结果的工具台50的位置及工件台100的位置的差分,对预先示教的所述示教数据进行修正,
[0063]
上述第一拍摄结果是利用预先取得的示教数据将机械臂14、15相对于工具台50及工件台100定位在规定的相对位置时的工具台50的位置及利用摄像机30拍摄了工件台100的位置的情况下的结果,
[0064]
上述第二拍摄结果是在将机械臂14、15、工具台50及工件台100重新组装于支撑台45的状态(升降通道搬入后的组装)中,由摄像机30拍摄将机械臂14、15相对于工具台50及工件台100定位在规定的相对位置时的工具台50的位置及工件台100的位置的结果。
[0065]
由此,能够将在机械臂14、15与工具台50以及工件台100之间产生的位置误差抑制得较小。
[0066]
接着,参照图5,对电梯导轨固定装置的概略作业步骤进行说明。图5是表示本发明的一个实施例所涉及的电梯作业装置10中的导轨1的安装作业例的流程图。
[0067]
在步骤s101中开始安装作业,在步骤s102中,控制卷扬机5直至预先决定的支架2、3的安装高度,使作业平台7移动。在步骤s103中,利用磁力手80将支架2、3定位在规定的位置。在步骤s104中,在机械臂14、15的机械手前端安装锤钻60,在升降通道壁面进行锚定螺栓1a用的穿孔。在步骤s105中,在机械臂14、15的机械手前端安装固定工具90,把持载置于工件台100的锚定螺栓1a,将锚定螺栓1a打入到升降通道壁面的穿孔孔内。在步骤s106中,利用螺母扳手70将螺母1e(参照图1b)插入并紧固于锚定螺栓1a,由此将支架2、3的壁支架固定于壁面。在步骤s107中,使用螺母扳手70将固定于升降通道壁面的壁支架与轨道支架之间的调整螺栓1b(参照图1b)固定。在步骤s108中,使用轨道夹1c将导轨1固定于支架2、3的轨道支架。在步骤s109中,判定是否针对相同的安装高度的支架2、3完成了作业,在未完成的情况下返回到步骤s103。在步骤s110中,判定升降通道内的所有高度处的支架2、3对导轨1的固定是否结束,在未结束的情况下,控制卷扬机5直至下一高度,使作业平台7移动。
[0068]
通过反复进行这样的作业,电梯作业装置10实施导轨1向升降通道的固定。
[0069]
接着,参照图6及图7对搭载有机械臂14、15的台车45与工具台50及工件台100的连接进行说明。图6是表示用于图1a的电梯作业装置10的、搭载于台车45的机械臂15的立体图。图7是表示安装于图1a的电梯作业装置10的机械臂14、15的台车45的工具台50的连接部的示例的立体图。另外,在图6中,图示了第二机械臂15,但第一机械臂14也与图6的第二机械臂15同样地构成。
[0070]
机械臂14、15在现场以图6所示的状态被搬入。如图6所示,在台车45的侧面设置有台车板170,在台车板170的表面设置有2个定位销180(突出部)。通过使该定位销180与图7所示的工具台板190的对位孔(嵌合孔)195嵌合,能够始终将台车45与工具台50的位置关系保持为相同的状态。因此,即使在现场搬入后将工具台50组装于台车45的情况下,台车45与工具台50的相对位置也不变,因此通过使更换预先示教的工具的程序(工具更换程序)动作,能够进行机械手前端工具(作业工具)的更换以及部件的把持。
[0071]
对于工件台100,也与工具台50用的台车板170及工具台板190同样地,设置工件台用的台车板170及工件台板190,使用定位销180及对位孔195将工件台100固定于台车45,由此能够利用预先示教的数据来把持锚定螺栓1a等部件。
[0072]
台车板170、工具台板190以及工件台板190包括定位销180以及对位孔195,构成台车45与工具台50以及工件台100的对位部。工具台板190和与工具台板190对应的台车板170构成工具台50的对位部(工具台对位部),工件台板190和与工件台板190对应的台车板170构成工件台100的对位部(工件台对位部)。在工具台对位部170、190中还包括定位销180及对位孔195。另外,在工件台对位部170、190中还包括定位销180及对位孔195。
[0073]
另外,台车45具备2个台车板170,在工具台板190与一方的台车板170之间构成由定位销(突出部)180和对位孔(嵌合孔)195构成的工具座嵌合部,在工件台板190与另一方的台车板170之间构成由定位销(突出部)180和对位孔(嵌合孔)195构成的工件台嵌合部。
[0074]
在本例中,对位孔195是与板面平行的截面为圆形的孔,定位销180构成为与轴向(突出方向)垂直的截面为圆形的凸部。即,工具台嵌合部以及工件台嵌合部是使与轴向垂直的剖面为圆形的定位销180与对位孔195嵌合的结构。
[0075]
通过使台车板170的板面与工具台板190以及工件台板190的板面紧贴,定位销180以及对位孔195分别各设置1个,从而能够进行台车45与工具台50以及工件台100的正确的定位。但是,在本例中,通过分别各设置2个定位销180以及对位孔195,能够防止台车板170的板面与工具台板190以及工件台板190的板面的微小的扭转,能够进行台车45与工具台50以及工件台100的更准确的定位。
[0076]
另外,台车板170相对于载置机械臂14、15的台车45的支撑面(载置面)45a位于下方,且配置于台车45的侧面。工具台板190以及工件台板190相对于工具台50以及工件台100配置于下方。由于台车板170、工具台板190以及工件台板190配置于台车45的支撑面45a的下方的空余空间,因此能够抑制电梯作业装置10的大型化,有助于电梯作业装置10的小型化。
[0077]
台车板170、工具台板190以及工件台板190构成为各板面沿着与水平方向垂直的方向(铅垂方向)的面。因此,在将工具台50以及工件台100载置于台车45的支撑面45a之后,能够使工具台50以及工件台100在支撑面45a上沿水平方向移动而进行定位销180与对位孔195的嵌合。由此,能够容易地进行工具台50和工件台100相对于台车45的对位。
[0078]
在本例中,也可以在台车板170侧设置对位孔195,在工具台板190以及工件台板190侧设置定位销180。
[0079]
图8是表示在图1a的电梯作业装置10中使用的、与工具台50的对位部170、190的另一个示例(变更例)的立体图。另外,在图8中,图示了第二机械臂15,但第一机械臂14也与图8的第二机械臂15同样地构成。另外,在图8中,图示了与工具台50的对位部170,但与工件台100的对位部170也与图8所示的对位部同样地构成。
[0080]
在图8的变更例中,台车板170的定位销180由与突出方向垂直的截面的形状呈正方形或长方形等方形(矩形)的突起(突出部)198构成。配合定位销180,工具台板190及工件台板190的对位孔195由与板面平行的截面的形状呈正方形或长方形等矩形形状的孔构成。在该情况下,工具台对位部以及工件台对位部170、190、180、195由方形的嵌合结构构成。
[0081]
在本变更例中,台车45具备2个台车板170,在工具台板190与一方的台车板170之间构成由突起(突出部)198和对位孔(嵌合孔)195构成的工具台嵌合部,在工件台板190与另一方的台车板170之间构成由突起(突出部)198和对位孔(嵌合孔)195构成的工件台嵌合部。
[0082]
在将嵌合的部分的形状设为方形的突起198的情况下,即使在将突起的数量设为1个的情况下,也能够进行提高了台车45与工具台50以及工件台100的精度的对位。由此,能够将台车45与工具台50以及工件台100的位置关系始终保持为相同的状态。因此,即使在现场搬入后将工具台50以及工件台100组装于台车45的情况下,也能够抑制台车45与工具台50以及工件台100的相对的位置偏移的产生,因此通过使更换预先示教的工具的程序(工具更换程序)动作,能够进行机械手前端工具(作业工具)的更换以及部件的把持。
[0083]
如以上说明的那样,本实施例的电梯作业装置10具备下述结构。
[0084]
电梯作业装置10设置于在升降通道内沿上下方向移动的作业平台7之上,在升降通道内进行作业,其具备:
[0085]
机械臂14、15,其在机械手前端具有工具更换40;
[0086]
工具台50,其能够与工具更换器40结合且载置能够从工具更换器40分离地设置的
多个作业工具;
[0087]
工件台100,其载置机械臂14、15用于作业的部件;
[0088]
支撑台45,其组装有机械臂14、15、工具台50以及工件台100;
[0089]
工具台对位部170、180、190、195、198,其将工具台50相对于组装有机械臂14、15的支撑台45的相对位置精度收敛于规定精度;以及
[0090]
工件台对位部170、180、190、195、198,其将工件台100相对于组装有机械臂14、15的支撑台45的相对位置精度收敛于规定精度,
[0091]
工具台对位部及工件台对位部170、180、190、195、198将所述规定精度收敛于如下的位置精度:在将机械臂14、15、工具台50、工件台100以及支撑台45搬入至升降通道而组装后,不进行机械臂14、15与工具台50及工件台100的相对位置关系的示教,机械臂14、15能够访问载置于工具台50的作业工具及载置于工件台100的部件。
[0092]
进而,本实施例的电梯作业装置10具备下述结构。
[0093]
台车45具有相对于载置机械臂14、15的载置面(支撑面)45a位于下方且配置于该台车45的侧面的2个台车板170,
[0094]
工具台50及工件台100具有相对于工具台50及工件台100配置于下方的工具台板及工件台板190,
[0095]
工具台板190与2个台车板170中的一方台车板抵接,
[0096]
工件台板190与2个台车板170的另一方台车板抵接,
[0097]
在工具台板190与一方的台车板170之间构成由突出部180、198和嵌合孔195构成的工具台嵌合部,
[0098]
在工件台板190与另一方的台车板170之间构成由突出部180、198和嵌合孔195构成的工件台嵌合部,
[0099]
工具台板190、一方的台车板170以及工具台嵌合部180、198、195构成工具台对位部,
[0100]
工件台板190、另一方的台车板170以及工件台嵌合部180、198、195构成工件台对位部。
[0101]
在上述的实施例及其变更例中,工具台50及工件台100与支撑台45的相对位置精度高于支撑台45与作业平台7的相对位置精度。
[0102]
此外,本发明并不限定于上述的实施例,包括各种变形例。例如,上述的实施例是为了容易理解地说明本发明而详细地进行了说明的例子,并不限定于必须具备所说明的全部结构。另外,对于实施例的结构的一部分,能够进行其他结构的追加、置换。
[0103]
另外,上述的各结构、功能、处理部、处理单元等也可以通过例如通过集成电路来设计它们的一部分或者全部等而通过硬件来实现。另外,上述的各结构、功能等也可以通过处理器解释并执行实现各个功能的程序而通过软件来实现。实现各功能的程序、表、文件等信息能够放置在存储器、硬盘、ssd(solid state drive:固态驱动器)等记录装置、或者ic卡、sd卡、dvd等记录介质中。
[0104]
另外,控制线、信息线表示在说明上所需要的,在产品上不一定表示全部的控制线、信息线。实际上也可以认为几乎全部的结构相互连接。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。