1.本发明涉及虚拟现实技术领域,具体涉及基于机器人的室内被困人员搜救引导疏散系统及方法。
背景技术:
2.随着虚拟现实技术的不断发展,将虚拟现实技术应用于应急疏散领域,可以减少不必要的人员伤亡及降低成本。
3.由于传统应急疏散存在风险高,成本代价大且不易实现等缺点,可视化的计算机仿真提供了直观的真实环境,且已成为主流,开展仿真演练显得尤为重要。然而,目前传统应急疏散的做法通常还是采用模拟灾情现场演练,或是发生真实火灾后消防人员的现场实操等形式。传统应急演练一般需要在专门的场地内进行,这种演练方法存在以下不足:(1)采用传统演练,需要进行演练前的培训学习,通常以视频等方式进行,耗费时间,且学习效果不佳。(2) 采用手把手教学的方式,参演人员虽说在一定程度上掌握了演练过程中的注意事项及疏散细节,但依然无法置身于整个疏散场景。(3)现场实操,搜救室内被困人员,或多或少存在一定的人员伤亡等不可控因素。(4)传统疏散演练所需器材价格不菲,每演练一次投入的资金成本、人力物力过大。
4.近年来,随着技术的发展,在疏散培训教学和仿真演练等方面,虚拟疏散演练系统有着广阔的应用前景。利用虚拟演练系统,智能机器人可以针对不同种类突发情况采取不同的搜救方案,通过路径规划,机器人可以对人员做出相应的疏散引导,从而缩短救援时间。
5.经检索,关于采用虚拟仿真技术进行智能机器人搜救室内被困人员及引导疏散方法已有相关专利公开,申请号为cn201420826600.9、授权公告日为2015年04月22日、名称为基于多智能体理论的搜救机器人系统的实用新型专利。该实用新型专利中的多智能体搜救机器人系统包括远程控制设备、多智能体机器人群和无线网络系统;所述的多智能体机器人群包括领导者机器人和跟随者机器人;领导者机器人和跟随者机器人均包括摄像头模块、车体和四个轮子;所述的摄像头模块设置在车体顶部;车体内设有单片机、扩展板、电机控制电路、定位系统、zigbee模块、红外生命探测模块、第一直流电源和第二直流电源。
6.又如,申请号为cn202120486714.3、授权公告日为2021年10月19日,名称为:一种基于多智能体的搜救机器人的实用新型专利。该实用新型专利中的多智能体搜救机器人包括:搜救机器人主体;所述搜救机器人主体包括摄像头和车身,且摄像头下侧设置有车身;所述摄像头下侧设置有拆装机构,且摄像头下侧皆固连有第一连接板;所述第一连接板远离摄像头的一端插设在滑槽内,且滑槽外侧开设在第二连接板内部;所述第二连接板上侧皆固连在车身内壁,且第一连接板内部开设有第二开槽;所述第二开槽内部插设有第三连接板,且第三连接板远离第一连接板的一侧固连有弹簧;所述弹簧远离第三连接板的一端固连在第二连接板内壁上。
7.上述两个实用新型专利中,均提供了一种多智能体的搜救机器人系统或方法,其
全面性不强,或者仅体现出其智能搜救,并未发挥其引导疏散的方法,而且其搜救多是以教程的形式进行解说,理论性比较强,与实际的三维仿真演练还有很大差距。为此,提出基于机器人的室内被困人员搜救引导疏散系统及方法。
技术实现要素:
8.本发明所要解决的技术问题在于:如何克服传统疏散演练存在的演练成本高、易出现拥挤踩踏甚至伤亡等事故、不易实现的不足,提供了基于机器人的室内被困人员搜救引导疏散系统,本系统通过对不同灾情场景下的路径进行优化,尤其是对搜救室内被困人员及疏散环境进行路径优化,提高了疏散效率,节约了搜救时间,用于真实环境中的演练时,能够更好地模拟出演练全过程,从而显著提高参演人员的熟练度。
9.本发明是通过以下技术方案解决上述技术问题的,本发明包括三维模型构建模块、注册登录模块、实际演练模块和考核模块;
10.所述三维模型构建模块,用于创建实际场景、机器人及疏散人员的三维模型;
11.所述注册登录模块,用于注册登录所述搜救引导疏散系统;
12.所述实际演练模块,用于进行应急疏散仿真演练,仿真演练内容包括智能搜救、引导疏散、实时信息显示;
13.所述考核模块,用于在演练结束后对整个过程进行考核评估。
14.更进一步地,在所述三维模型构建模块中,利用3ds max软件对实际建筑物场景进行建模,对机器人和疏散人员进行贴图渲染和动画设计;并将创建好的模型以fbx格式导出,再导入仿真演练系统中。
15.更进一步地,在所述注册登录模块中,对搜救引导疏散系统进行ui界面设计,进入搜救引导疏散系统前需要注册,注册成功后方可登录。
16.更进一步地,在所述实际演练模块中,仿真演练时包含的模型有火源模型、agent模型、速度模型;其中,火源模型即将火源简化后的一个圆锥模型,agent模型即在火源模型场景下,定义机器人及疏散人员为agent后,生成的模型,速度模型即根据各年龄段人员类型设定不同平均行走速度而生成的模型。
17.更进一步地,火源模型即将火源简化后的一个圆锥模型,并通过火源功率计算火势大小;所述火源模型的表达式为:
[0018][0019]
其中,d表示锥形底面直径;q表示火灾热释放率,单位为kw;qe表示单位面积的热释放率,单位为kw/m2,取值为500kw/m2;h表示火源高度。
[0020]
更进一步地,在所述火源模型场景下,定义机器人及疏散人员为agent,且都配有视觉传感器,采用射线检测技术模拟人类视觉,计算射线与物体的交点来确定两者距离;根据agent 当前位置,获取一定范围内的外界信息,通过模拟人类视线进行环境交互,并做出相应反应行为;以agent所处位置为中心,感知与其速度垂直方向左右90
°
范围内的物体;从agent 模型双眼视区内发射射线,当检测到物体碰撞时,识别它的位置和物体类型;agent在疏散过程中,会不时地检测是否发生碰撞,进而实时计算agent下一时刻的运动数据,包括位置信息、移动速度、运动方向等,通过从传感器接收的信息做出下一步决策。
[0021]
更进一步地,疏散人员agent属性分为固有属性和动态属性,其中固有属性里的年龄划分为成年男性、成年女性、小孩、老人;根据各年龄段人员类型设定不同平均行走速度,其中成年男性平均行走速度为1.49m/s;成年女性平均行走速度为1.42m/s;小孩平均行走速度为1.00m/s;老人平均行走速度为1.06m/s。
[0022]
更进一步地,三维演练场景模型构建后绑定的地图数据采用改进的a*算法对规划出来的路径进行处理,将当前节点周围8个相邻节点进行优先级划分,当前节点周围水平竖直方向的四个节点为优先遍历节点,剩余子节点依规则遍历;并引入贝塞尔曲线对规划出来的路径进行平滑处理。
[0023]
更进一步地,引入贝塞尔曲线对规划出来的路径进行平滑处理的过程如下:
[0024]
s101:根据机器人和障碍物选定一系列特征点,通过对特征点的拟合形成初始目标路径,机器人行走半径和横向加速度关系如下:
[0025][0026][0027]
其中,ρ表示对应路径曲率,r表示曲率半径,m表示机器人质量,ay表示机器人行走过程中的横向加速度,v表示机器人步速。
[0028]
s102:机器人的横向加速度和它的轨迹曲率呈线性关系,在整个搜救过程中,机器人的横向加速度连续,则轨迹曲率也要连续,这就要求机器人运动轨迹的拟合函数光滑可导,选择高阶贝塞尔曲线进行轨迹拟合,其表达式为:
[0029][0030]
其中,b(t)表示贝塞尔拟合曲线,t为曲线参数,pi表示构成曲线的(i 1)个顶点坐标。
[0031]
对子节点优化以及引入贝塞尔曲线,有效避免了机器人斜穿障碍物顶点,减少了拐角次数,路径安全性、机器人运动效率有较大提高,缩短了疏散中的搜救时间和路径长度。实际演练的熟练度也为演练结束后的考核评估起到了一定影响。
[0032]
更进一步的,在所述考核评估模块中,将对实际仿真演练全程操作做出一个合理的评价,评价方式主要以答题形式呈现,题目类型有三种,分别为单选题、多选题、简答题。题目来源于事先编辑好的题库中,随机抽取10道单选,5道多选,2道简答,分值分别为5分、6 分、10分,满分100分。其中,多选题选对一个即可得3分,全部选错得0分,简答题将根据关键词决定得分多少。提交答卷或答题时间结束后将以统计图形式直观反映答题内容掌握情况。最终,将获得的分值、答题人姓名、答题所用时间等信息上传至服务器。根据分值高低、答题时间长短以及不同搜救方案用时长短这三项指标对搜救引导疏散系统做出评价,评价等级分为优秀(90-100)、良好(80-90)、及格(60-80)、不及格(0-60)。
[0033]
本发明还提供了一种基于机器人搜救室内被困人员及引导疏散方法,采用上述的搜救引导疏散系统对室内被困人员进行搜救引导疏散,包括以下步骤:
[0034]
s1:首次进入搜救引导疏散系统需要注册,注册成功后方可登录,若登录输入3次错误密码,界面被锁定,30秒后重新输入;
[0035]
s2:进入场景后,机器人感知周围环境,采用射线检测技术模拟人类视觉,根据机器人所处位置,获取一定范围内的外界信息,通过模拟人类视线进行环境交互,每当检测到物理碰撞时,识别它碰撞对象的位置和类型,使用从传感器接收的信息来做出下一步响应是继续行走,还是加速奔跑,还是转弯避让,或是停止等行为;
[0036]
s3:机器人在搜救引导疏散过程中,将根据各年龄段人员类型采取不同的决策分析。同时,在搜救过程中会遇到墙体和障碍物等静态阻挡物,或者是被看成动态阻挡物的其他疏散人员,因此,个体需要考虑减速避免与阻挡物相撞,或是转向绕开阻挡物;
[0037]
s4:机器人会根据被困人员的自身状态及所处环境进行智能搜救,若被困人员丧失行动能力或因吸入大量有毒气体导致晕厥等,机器人发出警报,并立即向施救人员输出该被困人员信息,包括位置、伤亡情况、救援级别等;若被困人员有能力逃生,但因恐慌或浓烟迷失方向,机器人将采取引导疏散策略,协助被困人员到达安全出口;
[0038]
s5:搜救引导疏散过程中,可通过点击ui界面中的“实时信息显示”按钮,动态查看馆内人员总数、已疏散人员数、剩余人数和演练进行时间等信息,以便及时掌握室内人员情况。
[0039]
本发明相比现有技术具有以下优点:
[0040]
(1)通过对系统中各模块进行优化设计,尤其是对实际演练模块中的算法进行优化,从而能够有效提高疏散效率,用于真实场景的演练时,能够更好地模拟出实战演练效果,从而显著提高参演人员的执行效率;一方面能够为参演人员提供各种不同的三维场景以及演练所需的各类装备,同时更好地加深了参演人员对应急疏散的认知;另一方面,通过虚拟演练可以训练出智能机器人面对各种突发的、严峻的环境下的搜救能力。
[0041]
(2)通过对智能机器人装配视觉传感器,采用射线检测技术,计算射线与障碍物的交点来确定二者距离;根据机器人当前位置,获取一定范围内的外界信息,通过不断地训练模拟人类视线进行环境交互,并做出相应反应行为;当检测到物体碰撞时,识别其位置及类型;实时检测疏散过程中的碰撞信息,进而实时计算下一时刻的运动数据,通过从传感器接收的信息做出下一步决策。
[0042]
(3)将根据不用年龄段人员类型进行标记划分,分为两大类:一类是具有完全行为能力的个体,包括成年男性、成年女性;另一类是具有部分行为能力的个体,主要指小孩、老人;针对不同人员类型,采取的决策行为是不同的;智能机器人会根据被困人员的自身状态及所处环境决定采取何种疏散行为;若被困人员丧失行动能力或因吸入大量有毒气体导致晕厥等,机器人发出警报,并立即向施救人员输出该被困人员信息,包括位置、伤亡情况、救援级别等;若被困人员有能力逃生,但因恐慌或浓烟迷失方向,机器人将采取引导疏散策略,协助被困人员到达安全出口。
[0043]
(4)通过对传统路径规划算法的改进,解决了机器人途径障碍物顶点时斜穿而过的问题;本发明在传统八邻域的基础上做了改进,将当前节点周围八个相邻节点进行优先级划分,即当前节点周围水平竖直方向的四个节点为优先遍历节点,剩余子节点依规则遍历。
[0044]
(5)针对路径不平滑问题,引入了贝塞尔曲线;根据机器人和障碍物选定一系列特征点,通过对特征点的拟合形成初始目标路径;机器人的横向加速度和它的轨迹曲率呈线性关系,在整个搜救过程中,机器人的横向加速度连续,则轨迹曲率也要连续,这就要求机
器人运动轨迹的拟合函数光滑可导,因此选择高阶贝塞尔曲线进行轨迹拟合;对子节点优化以及引入贝塞尔曲线,有效避免了机器人斜穿障碍物顶点,减少了拐角次数,路径安全性、机器人运动效率有较大提高,缩短了疏散中的搜救时间和路径长度。
附图说明
[0045]
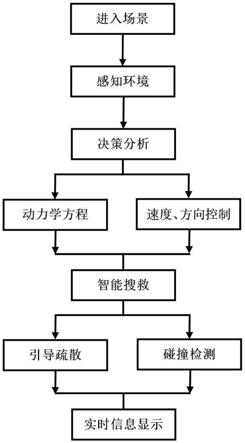
图1是本发明实施例中基于机器人搜救室内被困人员及引导疏散方法的流程示意图;
[0046]
图2是本发明实施例中基于机器人搜救室内被困人员及引导疏散方法的相邻节点优先级划分示意图。
具体实施方式
[0047]
下面对本发明的实施例作详细说明,本实施例在以本发明技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
[0048]
本实施例提供一种技术方案:基于机器人的室内被困人员搜救引导疏散系统,包括三维模型构建模块、注册登录模块、实际演练模块和考核模块;其中,三维模型构建模块用于创建三维模型,包括实际场景、机器人及疏散人员的三维模型;注册登录模块用于注册登录仿真系统(基于机器人的室内被困人员搜救引导疏散系统);实际演练模块用于进行应急疏散仿真演练,演练内容包括智能搜救、引导疏散、实时信息显示等,实际演练模块用于采用虚拟现实交互设备实现虚拟操作,虚拟操作所用到的虚拟设备有头戴式显示设备、手柄控制交互设备;考核模块用于在演练结束后对整个过程进行考核评估。
[0049]
在本实施例中,实际演练模块中还包括机器人个数及位置点设置功能、实时信息查看功能、置身体验功能。其中,机器人个数及位置点设置功能,正式开始演练后,根据灾情级别设置相应的机器人,包括机器人个数的多少以及初始位置点的选择。实时信息查看,可以动态查看疏散人员总数、已疏散人员数、剩余人数和演练进行时间等信息。置身体验功能,带上vr眼镜后,通过操作手柄,可以置身于三维场景中,亲身体验视觉上带来的冲击感,在头戴式显示设备和操作手柄的配合下,能够实现模拟疏散的功能,从而达到更好地仿真效果。
[0050]
在进行仿真演练时,先对三维演练场景进行建模,在3ds max软件中对真实的疏散场景和疏散人员进行贴图渲染和动画设计。所创建的模型将根据真实现场1:1等比例复刻,将创建好的模型以fbx格式导出,并导入仿真系统(基于机器人的室内被困人员搜救引导疏散系统)中。
[0051]
需要说明的是,现有技术中设计的虚拟仿真疏散演练系统,其演练用的目标三维场景对象通常都是经过相关软件设计得到,一方面,演练用的目标三维场景对象不同,模型的构建也大不相同,不同的演练用的目标三维场景对象之间差异性较大,具体的搜救流程及疏散步骤均有较大差别,不具有普适性。另一方面,现有的对目标模型的构建上很少考虑模型建立的准确度及逼真度问题,真实体验感不强,且其搜救多是以教程的形式进行解说,理论性比较强,与实际的三维仿真演练还有很大差距,导致演练效果不够理想。本发明通过对系统中各模块进行优化设计,尤其是对实际演练模块中的算法进行优化,从而能够有效
提高疏散效率,用于真实场景的演练时,能够更好地模拟出实战效果,从而显著提高参演人员的执行效率。
[0052]
在本实施例中,三维演练场景模型构建后绑定的地图数据采用改进的a*算法对规划出来的路径进行处理,在传统八邻域的基础上做了改进,将当前节点周围八个相邻节点进行优先级划分,即当前节点周围水平竖直方向的四个节点为优先遍历节点,剩余子节点依规则遍历,其遍历规则为(如图2所示):设当前节点为o,周围相邻节点分别为a、b、c、d、e、s、w、 n,其中a为西北方向的节点,b为东北方向的节点,c为西南方向的节点,d为东南方向的节点,e为正东方向的节点,s为正南方向的节点,w为正西方向的节点,n为正北方向的节点。e、s、w、n四个节点为优先遍历节点,将a、b、c、d四个节点定义为普通子节点。若障碍物栅格节点为e,则删除普通子节点b、d,未生成的斜穿路径为ob、od;若障碍物栅格节点为s,则删除普通子节点c、d,未生成的斜穿路径为oc、od;若障碍物栅格节点为w,则删除普通子节点a、c,未生成的斜穿路径为oa、oc;若障碍物栅格节点为n,则删除普通子节点a、b,未生成的斜穿路径为oa、ob。优先级划分的引入有效解决了机器人途径障碍物顶点时斜穿而过的问题。
[0053]
作为更具体地,本发明中将初始点s放入开放列表openlist中,所谓的openlist基本上是一个待检查的方格列表,目前openlist里只有一项,也就是s点,后面将逐步加入更多项。若openlist为空,则搜索失败。若openlist中存在目标点,则搜索成功。然后从openlist 中取f(n)值最小的节点作为当前父节点,并将其加入到封闭列表closelist中,closelist 中的每个方格都无需再关注。计算与当前父节点相邻的所有可达子节点,对每一个子节点:若该节点在closelist中,则丢弃;若该节点在openlist中,则检查通过当前节点计算得到的f(n)值是否更小,如果更小则更新f(n),并将其父节点设置为当前节点;若该节点不在 openlist中,则将其加入到openlist中,并计算f(n)值,设置其父节点为当前节点,如此循环。当openlist中出现目标点e时,说明路径已经找到,当openlist中没有了数据,则说明无合适路径。
[0054]
路径初步规划后,引入贝塞尔曲线,对初步规划出来的路径进行平滑处理。根据机器人和障碍物选定一系列特征点,特征点为疏散路径上的转折节点。遍历每个特征点,若两个特征点之间可以直线到达,则记录它们之间的实际距离;若不是直线可达,则记录它们的距离为无穷大。将所有可以直线互通的节点距离转换为一个距离矩阵,然后比较距离长短,删除不必要的特征点,择优提取从起点到终点最短路径上的关键特征点,通过对特征点的拟合形成初始目标路径。机器人行走半径和横向加速度关系如下:
[0055][0056]
其中,ρ为对应路径曲率,r为曲率半径,m为机器人质量,ay是机器人行走过程中的横向加速度,v为机器人步速。
[0057]
机器人的横向加速度和它的轨迹曲率呈线性关系,在整个搜救过程中,机器人的横向加速度连续,则轨迹曲率也要连续,这就要求机器人运动轨迹的拟合函数光滑可导,因此选择高阶贝塞尔曲线进行轨迹拟合,其表达式为:
[0058][0059]
其中,b(t)表示贝塞尔拟合曲线,t为曲线参数,pi表示构成曲线的(i 1)个顶点坐标。
[0060]
对子节点优化以及引入贝塞尔曲线,有效避免了机器人斜穿障碍物顶点,减少了拐角次数,路径安全性、机器人运动效率有较大提高,缩短了疏散中的搜救时间和路径长度。
[0061]
此外,该系统内可保存录制好的教学视频以及操作说明文档,可以让初次参演学习人员在操作之前通过简单学习更好、更全面地了解具体操作流程,从而进一步提高参演学习人员的熟练度和安全意识,有效保证了演练效果。同时,本系统制作以unity3d为依托,利用 fairygui制作ui界面。在vr方面则是使用了steamvr,展示对应对象功能。对应的资源文件则打包封存在unity3d里面对应资源文件夹内。在功能制作完成后针对不同系统进行打包,生成对应软件,且对应的仿真演练场景可以是寻常市面的pc端,也可以是移动端。在功能模块上,加上模式转换可以是普通pc端,也可以是vr设备,还可以不定期进行更新,方便快捷。
[0062]
如图1所示,本实施例还提供基于机器人的室内被困人员搜救引导疏散方法,采用上述的搜救引导疏散系统对室内被困人员进行搜救引导疏散,包括以下步骤:
[0063]
s1:首次进入搜救引导疏散系统需要注册,注册成功后方可登录,若登录输入3次错误密码,界面被锁定,30秒后重新输入;
[0064]
s2:进入场景后,机器人感知周围环境,采用射线检测技术模拟人类视觉,根据机器人所处位置,获取一定范围内的外界信息,通过模拟人类视线进行环境交互,每当检测到物理碰撞时,识别它碰撞对象的位置和类型,使用从传感器接收的信息来做出下一步响应是继续行走,还是加速奔跑,还是转弯避让,或是停止等行为;
[0065]
s3:机器人在搜救引导疏散过程中,将根据各年龄段人员类型采取不同的决策分析;同时,在搜救过程中会遇到墙体和障碍物等静态阻挡物,或者是被看成动态阻挡物的其他疏散人员,因此,个体需要考虑减速避免与阻挡物相撞,或是转向绕开阻挡物;
[0066]
s4:机器人会根据被困人员的自身状态及所处环境进行智能搜救,若被困人员丧失行动能力或因吸入大量有毒气体导致晕厥等,机器人发出警报,并立即向施救人员输出该被困人员信息,包括位置、伤亡情况、救援级别等;若被困人员有能力逃生,但因恐慌或浓烟迷失方向,机器人将采取引导疏散策略,协助被困人员到达安全出口;
[0067]
s5:搜救引导疏散过程中,可通过点击ui界面中的“实时信息显示”按钮,动态查看馆内人员总数、已疏散人员数、剩余人数和演练进行时间等信息,以便及时掌握室内人员情况。
[0068]
实施例二
[0069]
本实施例中采用实施例一中的基于机器人的室内被困人员搜救引导疏散系统对某高校图书馆进行仿真演练,其主要步骤如下:
[0070]
(1)仿真演练系统(基于机器人的室内被困人员搜救引导疏散系统)的进入
[0071]
参演人员佩戴好虚拟显示头盔装置和手持控制手柄,点击头盔中看到的ui界面显示的“开始演练”按钮;
[0072]
(2)仿真演练
[0073]
进入演练大厅后,参演人员听见警报鸣笛声,并有嘈杂人声,参演人员将按照场景中规划的路线进行安全疏散;若在疏散过程中进入危险区域,且因浓烟迷失方向,机器人及时前往所在地,引导疏散;
[0074]
(3)实时信息显示
[0075]
疏散演练过程中,参演人员可以动态查看馆内人员总数、已疏散人员数、剩余人数和演练进行时间等信息。
[0076]
综上所述,上述实施例的基于机器人的室内被困人员搜救引导疏散系统,通过设置机器人个数及初始位置来感知环境,对灾情中室内被困人员进行智能搜救,并采集现场实时三维图像数据,做出决策分析,将周围环境信息及时传输给现场施救人员;疏散方法采用机器人进行模拟训练,以虚拟现实技术为依托,并通过改进的路径规划算法对疏散路径进行优化,创建更加逼真的疏散环境及人物重建模型,提高了疏散效率,能够更好地模拟出真实的疏散过程,从而为有效减少人员疏散中的伤亡和最佳救援方案的制定提供了参考,具有一定的现实指导意义,值得被推广使用。
[0077]
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。