技术特征:
1.基于机器人的室内被困人员搜救引导疏散系统,其特征在于,包括:三维模型构建模块、注册登录模块、实际演练模块和考核模块;所述三维模型构建模块,用于创建实际场景、机器人及疏散人员的三维模型;所述注册登录模块,用于注册登录所述搜救引导疏散系统;所述实际演练模块,用于进行应急疏散仿真演练,仿真演练内容包括智能搜救、引导疏散、实时信息显示;所述考核模块,用于在演练结束后对整个过程进行考核评估。2.根据权利要求1所述的基于机器人的室内被困人员搜救引导疏散系统,其特征在于:在所述三维模型构建模块中,利用3ds max软件对实际建筑物场景进行建模,生成三维演练场景模型;对机器人和疏散人员进行贴图渲染和动画设计;并将创建好的模型以fbx格式导出,再导入搜救引导疏散系统中。3.根据权利要求1所述的基于机器人的室内被困人员搜救引导疏散系统,其特征在于:在所述注册登录模块中,对搜救引导疏散系统进行ui界面设计,进入搜救引导疏散系统前需要注册,注册成功后方可登录。4.根据权利要求1所述的基于机器人的室内被困人员搜救引导疏散系统,其特征在于:在所述实际演练模块中,仿真演练时包含的模型有火源模型、agent模型、速度模型;其中,火源模型即将火源简化后的一个圆锥模型;agent模型即在火源模型场景下,定义机器人及疏散人员为agent后生成的模型;速度模型即根据各年龄段人员类型设定不同平均行走速度而生成的模型。5.根据权利要求4所述的基于机器人的室内被困人员搜救引导疏散系统,其特征在于:火源模型即将火源简化后的一个圆锥模型,并通过火源功率计算火势大小;所述火源模型的表达式为:h=-1.02d 0.235q
2/5
其中,d表示锥形底面直径;q表示火灾热释放率,单位为kw;q
e
表示单位面积的热释放率,单位为kw/m2,取值为500kw/m2;h表示火源高度。6.根据权利要求4所述的基于机器人的室内被困人员搜救引导疏散系统,其特征在于:在所述火源模型场景下,定义机器人及疏散人员为agent,且均配有视觉传感器,采用射线检测技术模拟人类视觉,计算射线与物体的交点来确定两者距离;根据agent当前位置,获取一定范围内的外界信息,通过模拟人类视线进行环境交互,并做出相应反应行为;以agent所处位置为中心,感知与其速度垂直方向左右90
°
范围内的物体;从agent模型双眼视区内发射射线,当检测到物体碰撞时,识别它的位置和物体类型;agent在疏散过程中,不定时地检测是否发生碰撞,进而实时计算agent下一时刻的运动数据,包括位置信息、移动速度、运动方向,通过从传感器接收的信息做出下一步决策。7.根据权利要求6所述的基于机器人的室内被困人员搜救引导疏散系统,其特征在于:疏散人员agent属性分为固有属性和动态属性,其中固有属性里的年龄划分为成年男性、成年女性、小孩、老人;根据各年龄段人员类型设定不同平均行走速度,其中成年男性平均行走速度为1.49m/s;成年女性平均行走速度为1.42m/s;小孩平均行走速度为1.00m/s;老人平均行走速度为1.06m/s。
8.根据权利要求2所述的基于机器人的室内被困人员搜救引导疏散系统,其特征在于:三维演练场景模型构建后绑定的地图数据采用改进的a*算法对规划出来的路径进行处理,将当前节点周围8个相邻节点进行优先级划分,当前节点周围水平竖直方向的四个节点为优先遍历节点,剩余子节点依规则遍历;并引入贝塞尔曲线对规划出来的路径进行平滑处理。9.根据权利要求8所述的基于机器人的室内被困人员搜救引导疏散系统,其特征在于:引入贝塞尔曲线对规划出来的路径进行平滑处理的过程如下:s101:根据机器人和障碍物选定一系列特征点,通过对特征点的拟合形成初始目标路径,机器人行走半径和横向加速度关系如下:径,机器人行走半径和横向加速度关系如下:其中,ρ表示对应路径曲率,r表示曲率半径,m表示机器人质量,a
y
表示机器人行走过程中的横向加速度,v表示机器人步速;s102:机器人的横向加速度和它的轨迹曲率呈线性关系,在整个搜救过程中,机器人的横向加速度连续,则轨迹曲率也连续,选择高阶贝塞尔曲线进行轨迹拟合,其表达式为:其中,b(t)表示贝塞尔拟合曲线,t为曲线参数,p
i
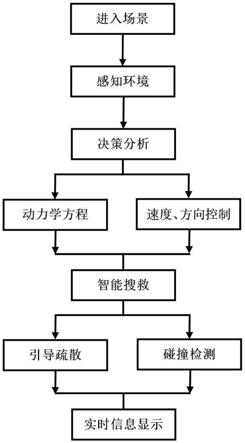
表示构成曲线的(i 1)个顶点坐标。10.一种基于机器人搜救室内被困人员及引导疏散方法,采用如权利要求1~9任一项所述的搜救引导疏散系统对室内被困人员进行搜救引导疏散,包括以下步骤:s1:首次进入搜救引导疏散系统需要注册,注册成功后方可登录,若登录输入3次错误密码,界面被锁定,30秒后重新输入;s2:进入场景后,机器人感知周围环境,采用射线检测技术模拟人类视觉,根据机器人所处位置,获取一定范围内的外界信息,通过模拟人类视线进行环境交互,每当检测到物理碰撞时,识别它碰撞对象的位置和类型,使用从传感器接收的信息来做出下一步响应是继续行走,还是加速奔跑,还是转弯避让,或是停止等行为;s3:机器人在搜救引导疏散过程中,根据各年龄段人员类型采取不同的决策分析;同时,在搜救过程中遇到墙体和障碍物等静态阻挡物,或者是被看作动态阻挡物的其他疏散人员,个体需要进行减速避免与阻挡物相撞,或是转向绕开阻挡物;s4:机器人根据被困人员的自身状态及所处环境进行智能搜救,若被困人员丧失行动能力或因吸入大量有毒气体导致晕厥,机器人发出警报,并立即向施救人员输出该被困人员信息,包括位置、伤亡情况、救援级别信息;若被困人员有能力逃生,但因恐慌或浓烟迷失方向,机器人将采取引导疏散策略,协助被困人员到达安全出口;s5:搜救引导疏散过程中,通过点击ui界面中的“实时信息显示”按钮,动态查看馆内人员总数、已疏散人员数、剩余人数和演练进行时间信息。
技术总结
本发明公开了基于机器人的室内被困人员搜救引导疏散系统及方法,属于虚拟仿真技术领域。本发明通过设置机器人个数及初始位置来感知环境,对灾情中室内被困人员进行智能搜救,并采集现场实时三维图像数据,做出决策分析,将周围环境信息及时传输给现场施救人员。本发明的疏散方法采用机器人进行模拟训练,以虚拟现实技术为依托,并通过改进的路径规划算法对疏散路径进行优化,创建更加逼真的疏散环境及人物重建模型,提高了疏散效率,能够更好地模拟出真实的疏散过程,从而为有效减少人员疏散中的伤亡和最佳救援方案的制定提供了参考,具有一定的现实指导意义,值得被推广使用。值得被推广使用。值得被推广使用。
技术研发人员:张学锋 刘束青 储岳中 汤亚玲 唐永吉 穆如如
受保护的技术使用者:安徽工业大学
技术研发日:2022.02.24
技术公布日:2022/5/31
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。