1.本技术涉及清棉加工设备技术领域,具体而言,涉及一种智能化纺织加工清棉机器人。
背景技术:
2.清棉是把棉花原料按选配的比例从棉包中抓取出来,进行混合均匀,开松成为小棉块或者小棉束,除去棉花中的部分杂质和疵点,然后集成一定宽度、厚度或重量的棉层,卷绕成棉卷。
3.棉花在纺织加工过程中,需要将纺织用的棉花集成一定的宽度后卷绕成棉卷。棉卷在纺织集成收卷时,由于集成的棉层上表面存在部分附着的棉毛絮,附着的棉毛絮在棉层收卷的过程中容易散开在空气中,导致空气中有着较多棉毛絮,影响作业人员的人体健康。
技术实现要素:
4.本技术旨在至少解决现有技术中存在的技术问题之一。为此,本技术提出一种智能化纺织加工清棉机器人,以解决棉卷在纺织集成收卷时,由于集成的棉层上表面存在部分附着的棉毛絮,附着的棉毛絮在棉层收卷的过程中容易散开在空气中,导致空气中有着较多棉毛絮,影响作业人员的人体健康的问题。
5.根据本技术实施例的一种智能化纺织加工清棉机器人,包括:机械臂主体和棉絮清理机构。
6.所述棉絮清理机构包括支撑横板、侧板、第一气缸、固定横板、弹性连接件、压辊、第一驱动组件和静电棒,两块所述侧板分别固定安装于所述支撑横板两侧,所述固定横板设置于所述支撑横板上方,且所述弹性连接件连接于所述支撑横板和所述固定横板,所述第一气缸安装于所述机械臂主体执行端,且所述第一气缸输出杆端固定连接于所述固定横板顶部,所述压辊转动安装于两块所述侧板之间,所述静电棒设置于所述压辊一侧,且所述静电棒连接于所述侧板内壁,所述第一驱动组件安装于所述侧板外壁,且所述第一驱动组件输出端驱动所述压辊转动。
7.在本技术的一些实施例中,所述第一驱动组件包括第一电机、第一主动带轮、第一从动带轮和第一传动带,所述第一电机安装于所述侧板外壁,所述第一主动带轮固定设置于所述第一电机输出轴端,所述第一从动带轮固定设置于所述压辊一端,所述第一传动带连接于所述第一主动带轮和第一从动带轮。
8.在本技术的一些实施例中,所述侧板外壁固定连接有安装板,所述第一电机安装于所述安装板底部。
9.在本技术的一些实施例中,所述安装板顶部固定设置有加强板,所述加强板固定连接于所述侧板。
10.在本技术的一些实施例中,所述加强板至少设置有两块,且所述加强板为三角形
结构。
11.在本技术的一些实施例中,所述弹性连接件包括弹簧,所述弹簧两端分别固定连接于所述支撑横板和所述固定横板。
12.在本技术的一些实施例中,所述支撑横板顶部固定设置有导杆,所述导杆顶端活动贯穿于所述固定横板,且所述弹簧套设于所述导杆外部。
13.在本技术的一些实施例中,所述固定横板上方设置有限位端盖,所述限位端盖固定连接于所述导杆顶端。
14.在本技术的一些实施例中,所述固定横板顶部设置有限位孔,所述导杆滑动贯穿于所述限位孔。
15.在本技术的一些实施例中,所述固定横板顶部固定设置有连接板,所述第一气缸输出杆端固定连接于所述连接板顶部。
16.上述智能化纺织加工清棉机器人中的静电棒对棉层上方的棉毛絮进行吸附,但是吸附在静电棒上的棉毛距离棉层较近,不方便手工清理静电棒上吸附的棉毛絮。
17.该智能化纺织加工清棉机器人还包括辅助移动机构,所述辅助移动机构包括第二气缸、滑杆、支撑座、连接座和l型架板,两块所述侧板相对一侧均设置有弧形滑槽,两根所述滑杆一端分别安装于所述静电棒两端,且所述滑杆远离所述静电棒一端滑动设置于所述弧形滑槽内部,所述l型架板安装于所述侧板背面,所述支撑座固定设置于所述l型架板靠近所述滑杆一侧,所述连接座转动连接于所述滑杆,所述第二气缸底部与所述支撑座铰接连接,所述第二气缸输出杆端铰接于所述连接座。
18.当需要清理静电棒底部吸附的棉毛絮时,通过第二气缸输出杆端带动端部的连接座和滑杆沿着弧形滑槽内部移动,即实现第二气缸带动两根滑杆之间静电棒沿着弧形滑槽的轨迹逐渐向上移动,使得静电棒能够向上移动,增加静电棒和棉层之间的距离,方便将手放置在静电棒下方取下静电棒下方吸附的棉毛絮。
19.当第二气缸输出端带动静电棒沿着四分之一圆弧状结构的弧形滑槽向上移动的同时也在向侧板背面横向移动,在静电棒移动至最高处时,静电棒越靠近侧板背面,手部在支撑横板下方向内部探入的距离越短,即更加方便手部取出静电棒底部吸附的棉毛絮。
20.待静电棒底部的棉毛絮清理后,第二气缸推动静电棒沿着弧形滑槽向下移动靠近棉层,可继续对棉层表面的棉毛絮进行清理。
21.上述能化纺织加工清棉机器人对静电棒底部吸附的棉毛絮只能够采用手动清理,清理速度较慢、效率相对较低。
22.该智能化纺织加工清棉机器人还包括机械清理机构,所述机械清理机构包括辊轴、毛刷、第二驱动组件和支撑架杆,所述辊轴设置于所述静电棒远离所述压辊一侧,两个所述支撑架杆一端分别转动连接于所述辊轴两端,且所述支撑架杆另一端固定连接于所述l型架板靠近所述辊轴一侧,所述第二驱动组件安装于所述l型架板靠近所述辊轴一侧,且所述第二驱动组件输出端驱动所述辊轴转动,多块所述毛刷呈中心对称安装于所述辊轴外部。
23.在本技术的一些实施例中,所述第二驱动组件包括第二电机、第二主动带轮、第二从动带轮、第二传动带和安装架,所述安装架固定设置于所述l型架板靠近所述辊轴一侧,所述第二电机安装于所述安装架一侧,所述第二主动带轮固定设置于所述第二电机输出轴
端,所述第二从动带轮固定设置于所述辊轴一端,所述第二传动带连接于所述第二主动带轮和所述第二从动带轮。
24.第二气缸带动静电棒沿着弧形滑槽向上将移动至辊轴上方,此时将静电棒上的电源断开。部分棉毛絮在重力作用下掉落进行收集清理。第二驱动组件中的第二电机带动第二主动带轮转动,通过第二传动带和第二从动带轮的配合带动辊轴转动,即带动辊轴外部的毛刷转动将静电棒底部部分吸附的棉毛絮进行清理。
25.在本技术的一些实施例中,所述辊轴下方设置有收集盒,所述收集盒顶部设置为敞口,所述收集盒顶部设置有连接块,所述连接块固定连接于所述l型架板。
26.在本技术的一些实施例中,所述收集盒内部设置有吸水层,所述吸水层高度小于所述收集盒深度的一半。
27.第二气缸带动静电棒沿着弧形滑槽向上将移动至辊轴上方,此时将静电棒上的电源断开。部分棉毛絮在重力作用下掉落至收集盒内部进行收集。转动的辊轴带动外部的毛刷转动将静电棒底部吸附的棉毛絮进行清理,清理的棉毛絮落入至收集盒内部进行收集。收集盒内部的吸水层预先吸附一定的水量,保持吸水层表面潮湿,当棉毛絮落在收集盒内部时,吸水层表面将棉毛絮吸附,棉毛絮不易散落在空中飞舞,即减少空中飞散的棉毛絮,提高棉毛絮的收集量,同时也是进一步加强保护作业人员的人身安全。收集盒通过连接块采用螺栓固定安装的方式是便于将收集盒进行拆卸以及安装,即方便将盒体内部的收集的棉毛絮转出。
28.本技术的有益效果是:本技术通过上述设计得到的一种智能化纺织加工清棉机器人,使用时,机械臂主体将棉絮清理机构移动放置在棉层上方,使得压辊压持在棉层上方。同时第一驱动组件带动压辊转动可用于带动棉层继续移动。支撑横板和固定横板之间的弹性连接件使得压辊在压持棉层时有着一定的弹性,避免压辊对棉层造成过度挤压。压辊后侧的静电棒用于吸附棉层上表面附着的棉毛絮,使得棉层表面的棉毛絮被清理,减少清棉加工时棉毛絮飞散在空气中,降低棉毛絮对作业人员的身体伤害。
29.本技术的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
附图说明
30.为了更清楚地说明本技术实施例的技术方案,下面将对本技术实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本技术的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
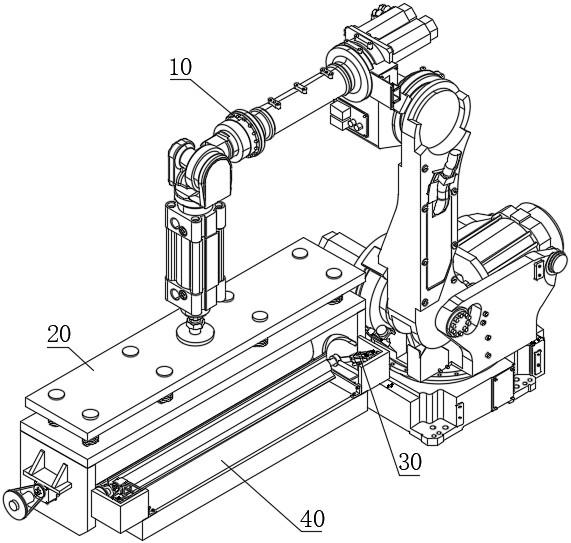
31.图1是根据本技术实施例的智能化纺织加工清棉机器人结构示意图;图2是根据本技术实施例的棉絮清理机构、辅助移动机构和机械清理机构结构示意图;图3是根据本技术实施例的棉絮清理机构结构示意图;图4是根据本技术实施例的弹性连接件结构示意图;图5是根据本技术实施例的第一驱动组件结构示意图;图6是根据本技术实施例的辅助移动机构和机械清理机构安装结构示意图;
图7是根据本技术实施例的l型架板和机械清理机构结构示意图;图8是根据本技术实施例的第二驱动组件结构示意图。
32.图标:10-机械臂主体;20-棉絮清理机构;210-支撑横板;220-侧板;221-弧形滑槽;230-第一气缸;240-固定横板;250-弹性连接件;251-弹簧;252-导杆;253-限位端盖;260-压辊;270-第一驱动组件;271-第一电机;272-第一主动带轮;273-第一从动带轮;274-第一传动带;275-安装板;276-加强板;280-静电棒;290-连接板;30-辅助移动机构;310-第二气缸;320-滑杆;330-支撑座;340-连接座;350-l型架板;40-机械清理机构;410-辊轴;420-毛刷;430-第二驱动组件;431-第二电机;432-第二主动带轮;433-第二从动带轮;434-第二传动带;435-安装架;440-支撑架杆;450-收集盒;460-吸水层;470-连接块。
具体实施方式
33.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行描述。
34.为使本技术实施方式的目的、技术方案和优点更加清楚,下面将结合本技术实施方式中的附图,对本技术实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本技术一部分实施方式,而不是全部的实施方式。基于本技术中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本技术保护的范围。
35.下面参考附图描述根据本技术实施例的一种智能化纺织加工清棉机器人。
36.请参阅图1-图8,根据本技术实施例的一种智能化纺织加工清棉机器人,包括:机械臂主体10和棉絮清理机构20。
37.其中,机械臂主体10采用本领域技术人员熟知现有技术的智能机械臂。机械臂主体10控制棉絮清理机构20移动至棉层上方,对棉层上方附着的棉毛絮进行清理。
38.棉絮清理机构20包括支撑横板210、侧板220、第一气缸230、固定横板240、弹性连接件250、压辊260、第一驱动组件270和静电棒280。两块侧板220分别固定安装于支撑横板210两侧,侧板220和支撑横板210之间采用螺栓固定。固定横板240设置于支撑横板210上方,且弹性连接件250连接于支撑横板210和固定横板240。第一气缸230安装于机械臂主体10执行端,且第一气缸230输出杆端固定连接于固定横板240顶部。固定横板240顶部固定设置有连接板290,第一气缸230输出杆端固定连接于连接板290顶部。压辊260转动安装于两块侧板220之间,静电棒280设置于压辊260一侧,且静电棒280连接于侧板220内壁。第一驱动组件270安装于侧板220外壁,且第一驱动组件270输出端驱动压辊260转动。
39.机械臂主体10将棉絮清理机构20移动放置在棉层上方,使得压辊260压持在棉层上方。同时第一驱动组件270带动压辊260转动可用于带动棉层继续移动。支撑横板210和固定横板240之间的弹性连接件250使得压辊260在压持棉层时有着一定的弹性,避免压辊260对棉层造成过度挤压。压辊260后侧的静电棒280用于吸附棉层上表面附着的棉毛絮,使得棉层表面的棉毛絮被清理,减少清棉加工时棉毛絮飞散在空气中,降低棉毛絮对作业人员的身体伤害。
40.需要说明的是,上述第一气缸230和静电棒280具体的型号规格需根据该装置的实际规格等进行选型确定,具体选型计算方法采用本领域现有技术,故不再详细赘述。第一气
缸230和静电棒280的供电及其原理对本领域技术人员来说是清楚的,在此不予详细说明。
41.在本技术的一些实施例中,弹性连接件250包括弹簧251,弹簧251两端分别固定连接于支撑横板210和固定横板240。支撑横板210顶部固定设置有导杆252,导杆252顶端活动贯穿于固定横板240,且弹簧251套设于导杆252外部。固定横板240上方设置有限位端盖253,限位端盖253固定连接于导杆252顶端。固定横板240顶部设置有限位孔,导杆252滑动贯穿于限位孔。弹性连接件250中的弹簧251使得固定横板240底部的支撑横板210有着良好的弹性,即使得支撑横板210下方的压辊260有着良好的弹性,避免压辊260对棉层造成过度挤压。导杆252用于限位弹簧251,限位端盖253用于限位导杆252顶端。
42.在本技术的一些实施例中,第一驱动组件270包括第一电机271、第一主动带轮272、第一从动带轮273和第一传动带274。第一电机271安装于侧板220外壁,第一主动带轮272固定设置于第一电机271输出轴端,第一主动带轮272和第一电机271输出轴端之间通过连接键固定;第一从动带轮273固定设置于压辊260一端,第一从动带轮273和压辊260轴端之间采用连接键固定。第一传动带274连接于第一主动带轮272和第一从动带轮273。
43.第一电机271带动第一主动带轮272转动,通过第一传动带274和第一从动带轮273的配合带动压辊260转动。
44.在本技术的一些实施例中,侧板220外壁固定连接有安装板275,侧板220和安装板275之间采用焊接固定;第一电机271安装于安装板275底部;安装板275用于辅助支撑安装第一电机271。安装板275顶部固定设置有加强板276,加强板276固定连接于侧板220;加强板276与安装板275和侧板220之间分别采用焊接固定,加强板276用于加强支撑安装板275。加强板276至少设置有两块,且加强板276为三角形结构;多块加强板276用于加强支撑安装板275。
45.需要说明的是,上述第一电机271具体的型号规格需根据该装置的实际规格等进行选型确定,具体选型计算方法采用本领域现有技术,故不再详细赘述。第一电机271的供电及其原理对本领域技术人员来说是清楚的,在此不予详细说明。
46.上述智能化纺织加工清棉机器人中的静电棒280对棉层上方的棉毛絮进行吸附,但是吸附在静电棒280上的棉毛距离棉层较近,不方便手工清理静电棒280上吸附的棉毛絮。
47.该智能化纺织加工清棉机器人还包括辅助移动机构30,辅助移动机构30包括第二气缸310、滑杆320、支撑座330、连接座340和l型架板350。两块侧板220相对一侧均设置有弧形滑槽221,两根滑杆320一端分别安装于静电棒280两端,且滑杆320远离静电棒280一端滑动设置于弧形滑槽221内部。l型架板350安装于侧板220背面,l型架板350和侧板220之间采用螺栓固定。支撑座330固定设置于l型架板350靠近滑杆320一侧,支撑座330和l型架板350之间采用螺栓固定;连接座340转动连接于滑杆320,第二气缸310底部与支撑座330铰接连接,第二气缸310输出杆端铰接于连接座340。其中,弧形滑槽221为四分之一圆弧状结构。
48.当需要清理静电棒280底部吸附的棉毛絮时,通过第二气缸310输出杆端带动端部的连接座340和滑杆320沿着弧形滑槽221内部移动,即实现第二气缸310带动两根滑杆320之间静电棒280沿着弧形滑槽221的轨迹逐渐向上移动,使得静电棒280能够向上移动,增加静电棒280和棉层之间的距离,方便将手放置在静电棒280下方取下静电棒280下方吸附的棉毛絮。
49.当第二气缸310输出端带动静电棒280沿着四分之一圆弧状结构的弧形滑槽221向上移动的同时也在向侧板220背面横向移动,在静电棒280移动至最高处时,静电棒280越靠近侧板220背面,手部在支撑横板210下方向内部探入的距离越短,即更加方便手部取出静电棒280底部吸附的棉毛絮。
50.待静电棒280底部的棉毛絮清理后,第二气缸310推动静电棒280沿着弧形滑槽221向下移动靠近棉层,可继续对棉层表面的棉毛絮进行清理。
51.需要说明的是,上述第二气缸310具体的型号规格需根据该装置的实际规格等进行选型确定,具体选型计算方法采用本领域现有技术,故不再详细赘述。第二气缸310的供电及其原理对本领域技术人员来说是清楚的,在此不予详细说明。
52.上述能化纺织加工清棉机器人对静电棒280底部吸附的棉毛絮只能够采用手动清理,清理速度较慢、效率相对较低。
53.该智能化纺织加工清棉机器人还包括机械清理机构40,机械清理机构40包括辊轴410、毛刷420、第二驱动组件430和支撑架杆440。辊轴410设置于静电棒280远离压辊260一侧,两个支撑架杆440一端分别转动连接于辊轴410两端,且支撑架杆440另一端固定连接于l型架板350靠近辊轴410一侧;支撑架杆440和l型架板350之间采用螺栓固定。第二驱动组件430安装于l型架板350靠近辊轴410一侧,且第二驱动组件430输出端驱动辊轴410转动,多块毛刷420呈中心对称安装于辊轴410外部。第二驱动组件430包括第二电机431、第二主动带轮432、第二从动带轮433、第二传动带434和安装架435。安装架435固定设置于l型架板350靠近辊轴410一侧,安装架435和l型架板350之间采用螺栓固定。第二电机431安装于安装架435一侧,第二主动带轮432固定设置于第二电机431输出轴端,第二主动带轮432和第二电机431输出轴端之间采用连接键固定;第二从动带轮433固定设置于辊轴410一端,第二从动带轮433和辊轴410之间采用连接键固定。第二传动带434连接于第二主动带轮432和第二从动带轮433。
54.第二气缸310带动静电棒280沿着弧形滑槽221向上将移动至辊轴410上方,此时将静电棒280上的电源断开。部分棉毛絮在重力作用下掉落进行收集清理。第二驱动组件430中的第二电机431带动第二主动带轮432转动,通过第二传动带434和第二从动带轮433的配合带动辊轴410转动,即带动辊轴410外部的毛刷420转动将静电棒280底部部分吸附的棉毛絮进行清理。
55.在本技术的一些实施例中,辊轴410下方设置有收集盒450,收集盒450顶部设置为敞口,收集盒450顶部设置有连接块470,连接块470固定连接于l型架板350;连接块470与l型架板350和收集盒450之间分别采用螺栓固定。收集盒450内部设置有吸水层460,吸水层460高度小于收集盒450深度的一半;吸水层460可以采用吸水良好的海绵。
56.第二气缸310带动静电棒280沿着弧形滑槽221向上将移动至辊轴410上方,此时将静电棒280上的电源断开。部分棉毛絮在重力作用下掉落至收集盒450内部进行收集。转动的辊轴410带动外部的毛刷420转动将静电棒280底部吸附的棉毛絮进行清理,清理的棉毛絮落入至收集盒450内部进行收集。收集盒450内部的吸水层460预先吸附一定的水量,保持吸水层460表面潮湿,当棉毛絮落在收集盒450内部时,吸水层460表面将棉毛絮吸附,棉毛絮不易散落在空中飞舞,即减少空中飞散的棉毛絮,提高棉毛絮的收集量,同时也是进一步加强保护作业人员的人身安全。收集盒450通过连接块470采用螺栓固定安装的方式是便于
将收集盒450进行拆卸以及安装,即方便将收集盒450内部的收集的棉毛絮转出。
57.需要说明的是,上述第二电机431具体的型号规格需根据该装置的实际规格等进行选型确定,具体选型计算方法采用本领域现有技术,故不再详细赘述。第二电机431的供电及其原理对本领域技术人员来说是清楚的,在此不予详细说明。
58.以上所述仅为本技术的实施例而已,并不用于限制本技术的保护范围,对于本领域的技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
59.以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应所述以权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。