1.本发明属于无人机飞行控制技术领域,具体涉及一种带机械臂的无人机协同编队阻抗控制方法。
背景技术:
2.近年来,随着科学技术的发展,导航和控制技术的不断成熟,飞行器的应用不断地扩大到各个场合中,如:灾难现场勘查、环境建模及监控犯罪分子。从而一种具有作业能力的带机械臂无人机成为研究的热点。带机械臂的无人机由无人机和机械臂组成,具有与环境交互的能力,具有广泛的应用前景,如:危险性抓捕及一些火灾现场的作业和抓取物品到指定地点投放任务。而对于单个带机械臂无人机的作业能力不能够执行单个任务,发展了带机械臂的无人机协同控制技术。协同控制技术的发展,使带机械臂的无人机更能完成复杂性任务,有很大的应用前景。而在机械臂末端使用阻抗控制更加精确的控制机械臂抓取物体,减少对物体的损坏。
3.在单个带机械臂无人机在单独执行任务时,对重量比自身重的物体,带机械臂无人机的飞行的升力不能够支撑,无法执行抓取。同时在没有阻抗控制的情况,对于机械臂在抓取物体时会出现对物体的损坏,运行不够柔顺。这将对带机械臂无人机带来很大的扰动。
4.而带机械臂多无人机协同抓取物体时,会出现编队飞行情况,保证带机械臂多无人机稳定飞行是需要解决的问题。
技术实现要素:
5.为了解决上述问题,本发明提供了一种带机械臂的无人机协同编队阻抗控制方法,具体技术方案如下:
6.一种带机械臂的无人机协同编队阻抗控制方法,包括以下步骤:
7.步骤s1,根据齐次方程及雅克比矩阵构建带机械臂无人机的运动学模型;
8.步骤s2,根据步骤s1中建立的运动学模型并基于拉格朗日-欧拉方程建立带机械臂无人机的动力学模型;
9.步骤s3,参考带机械臂多无人机的抓取运动情况及受力和力矩情况,构建协同编队阻抗控制器;
10.步骤s4,根据任务需求,设计参考物体轨迹,结合所述运动学模型的正运动控制及协同编队阻抗控制器的误差关系构建同步误差补偿控制器;
11.步骤s5:采用同步误差补偿控制器对带机械臂无人机的运动学模型进行修正补偿。
12.优选地,所述步骤s1中带机械臂无人机的运动学模型具体如下:
[0013][0014]
[0015][0016][0017]
其中,p
ek
为第k架带机械臂无人机的机械臂末端位置矩阵;p
bk
为第k架带机械臂无人机位置矩阵;r
bk
为第k架带机械臂无人机的旋转矩阵,t为转置;为第k架带机械臂无人机的机械臂末端相对于该无人机的位置矩阵;ω
ek
为第k架带机械臂无人机的机械臂末端的角速度矩阵;ω
bk
为第k架带机械臂无人机的角速度矩阵;为第k架带机械臂无人机的机械臂末端相对于该无人机的角速度矩阵;
[0018]vek
为第k架带机械臂无人机的机械臂末端速度矩阵;j
bk
为第k架带机械臂无人机的雅克比矩阵;j
ekbk
为第k架带机械臂无人机的机械臂的雅克比矩阵;为第k架带机械臂无人机的位姿速度矩阵;为第k架带机械臂无人机的机械臂角度矩阵。
[0019]
优选地,其中:
[0020][0021][0022]vek
=[ν
ex ν
ez ν
eθ
]
t
;
ꢀꢀ
(7)
[0023]
其中为第k架带机械臂无人机的x方向期望速度,为第k架带机械臂无人机的z方向期望速度,为第k架带机械臂无人机的期望俯仰角速度,为第k架带机械臂无人机的机械臂第1个关节的期望角速度,为第k架带机械臂无人机的机械臂第2个关节的期望角速度,ν
ex
为第k架带机械臂无人机的机械臂末端x方向的速度,ν
ez
为第k架带机械臂无人机的机械臂末端z方向的速度,ν
eθ
为第k架带机械臂无人机的机械臂末端俯仰角速度。
[0024]
优选地,还包括以下步骤:
[0025]
设
[0026][0027]
由上式得:
[0028][0029][0030]
式中,j
ζk
为第k架带机械臂无人机的雅克比矩阵j
bk
的第1到第3行和第1第2列数值,j
σk
为第k架带机械臂无人机的雅克比矩阵j
bk
的第1到第3行和第3列数值;
[0031]
设j
ηk
=[j
ζk j
ekbk
],由上式变换得:
[0032][0033]
式中,χk为第k架带机械臂无人机的对称增益矩阵;ek为第k架带机械臂无人机的机械臂末端位姿误差;而第k架带机械臂无人机的机械臂末端的位置y
ek
和偏航角ψ
ek
为无人机的位置y
bk
和偏航角ψ
bk
。
[0034]
优选地,所述步骤s2中带机械臂无人机的动力学模型具体如下:
[0035][0036][0037]
x
b1
=[x z θ]
t
;
ꢀꢀ
(15)
[0038]
q1=[q
1 q2]
t
;
ꢀꢀ
(16)
[0039]
x
b2
=[x z θ]
t
;
ꢀꢀ
(17)
[0040]
q2=[q
1 q2]
t
;
ꢀꢀ
(18)
[0041]
其中x为带机械臂无人机x方向上的位置,z为带机械臂无人机z方向上的位置,θ为带机械臂无人机的俯仰角,q1、q2分别为第k架带机械臂无人机的机械臂第1个、第2个关节的角度;为第k架带机械臂无人机的惯性矩阵;为第k架带机械臂无人机的离心力和哥氏力构成的矩阵;为第k架带机械臂无人机的重力项构成的矩阵;u=[u
1 u2]
t
,u1=[f
x f
z τ
θ τ
q1 τ
q2
]
t
,u2=[f
x f
z τ
θ τ
q1 τ
q2
]
t
,f
x
、fz分别为带机械臂无人机在x、z方向的力,τ
θ
为带机械臂无人机的俯仰角力矩,τ
q1
、τ
q2
分别带机械臂无人机的第1个、第2个机械臂转角力矩;
[0042][0043]
式中j
bk
为第k架带机械臂无人机的雅克比矩阵,j
ekbk
为第k架带机械臂无人机的机械臂的雅克比矩阵,f
ek
为第k架带机械臂无人机的机械臂末端与环境接触时的接触力矩阵。
[0044]
优选地,所述步骤s3中协同编队阻抗控制器的控制函数为:
[0045][0046][0047]
其中,m
sk
为第k架带机械臂无人机的期望惯量矩阵,b
sk
为第k架带机械臂无人机的期望阻尼矩阵,g
sk
为第k架带机械臂无人机的期望刚度矩阵,f
pk
为第k架带机械臂无人机的机械臂末端与环境接触力矩阵;x
pk
为第k架带机械臂无人机的机械臂末端期望位姿;x
sk
为第k架带机械臂无人机的机械臂末端实际位姿,为第k架带机械臂无人机的机械臂末端期望位姿速度,为第k架带机械臂无人机的机械臂末端实际位姿速度,为第k架带机械臂无人机的机械臂末端期望位姿加速度,为第k架带机械臂无人机的机械臂末端实际
位姿加速度;
[0048]
根据映射关系,将带机械臂多无人机的机械臂末端位置和姿态互相映射和映射到物体上,其方程为下式:
[0049][0050]
式中,x
p1-2
为第1架带机械臂无人机的机械臂末端位姿映射到第2架带机械臂无人机的机械臂末端位姿,x
p2-1
为第2架带机械臂无人机的机械臂末端位姿映射到第1架带机械臂无人机的机械臂末端位姿,x
12o
为第1架和第2架带机械臂无人机的机械臂末端映射到物体o的位姿,t
12
为第1架带机械臂无人机的机械臂末端到第2架带机械臂无人机的机械臂末端映射矩阵,t
21
为第2架带机械臂无人机的机械臂末端到第1架带机械臂无人机的机械臂末端映射矩阵,t
1o
为第1架带机械臂无人机的机械臂末端到物体o的映射矩阵,t
2o
为第2架带机械臂无人机的机械臂末端到物体o的映射矩阵;
[0051]
对于机械臂与被抓物体可得同步期望输入位姿为下式:
[0052][0053]
式中,x
po
为物体的期望位姿,为第1架带机械臂无人机的阻抗控制映射关系输出值,为第2架带机械臂无人机的阻抗控制映射关系输出值,为物体映射关系输出值。
[0054]
优选地,所述步骤s4中带机械臂无人机的同步阻抗控制的实际位姿输出如下:
[0055][0056][0057][0058][0059]
式中,k
e1
为第1架带机械臂无人机的机械臂的实际位姿与阻抗控制同步输入位姿的误差补偿参数;k
a1
为第1架与第2架带机械臂无人机的机械臂同步位姿误差补偿参数;k
q1
为第1架与第2架带机械臂无人机的机械臂末端互相映射误差补偿参数;k
e2
为第2架带机械臂无人机的机械臂的实际位姿与阻抗控制同步输入位姿的误差补偿参数;k
a2
为第1架与第2架带机械臂无人机的机械臂同步位姿误差补偿参数;k
q2
为第2架带机械臂无人机的机械臂末端的误差补偿参数;为带机械臂无人机的机械臂末端物体位姿,x
c1
为第1架带机械臂无人机的同步阻抗控制的实际位姿输出;x
c2
为第2架带机械臂无人机的同步阻抗控制的实际位姿输出;x1为第1架带机械臂无人机的机械臂末端实际输出位姿;x2为第2架带机械臂无人机的机械臂末端实际输出位姿。
[0060]
优选地,物体的运动轨迹与第1架和第2架带机械臂无人机的机械臂末端之间互相通过映射连接,其表达式为:
[0061][0062]
式中,为物体位姿,为第1架带机械臂无人机的机械臂末端期望位姿,为第2架带机械臂无人机的机械臂末端期望位姿,t
o1
和t
o2
为物体与第1架和第2架带机械臂无人机的机械臂末端映射矩阵;根据上述公式可以得到物体的运动轨迹映射到第1架和第2架带机械臂无人机的机械臂上,进而实现第1架和第2架带机械臂无人机的机械臂的运动轨迹规划。
[0063]
本发明的有益效果为:本发明提供了一种带机械臂的无人机协同编队阻抗控制方法,通过构建带机械臂无人机的运动学模型和动力学模型,构建协同编队阻抗控制器;根据任务需求,设计参考物体轨迹,结合所述运动学模型的正运动控制及协同编队阻抗控制器的误差关系构建同步误差补偿控制器;采用同步误差补偿控制器对带机械臂无人机的运动学模型进行修正补偿。本发明采用阻抗控制,能够解决机械臂的柔顺性抓取,减少对物体的损坏,并减少对无人机的扰动。单个带机械臂无人机在自身升力不够的情况下,采用本发明可实现带机械臂多无人机协同抓取物体飞行。在带机械臂无人机协同抓取物体时,在本发明的同步阻抗控制器下能够稳定飞行,保证了飞行过程中的干扰及精度,为协同编队飞行的机械臂柔顺运动控制提供了一种新方法。
附图说明
[0064]
为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍。在所有附图中,类似的元件或部分一般由类似的附图标记标识。附图中,各元件或部分并不一定按照实际的比例绘制。
[0065]
图1是本发明中带机械臂的无人机系统结构图;
[0066]
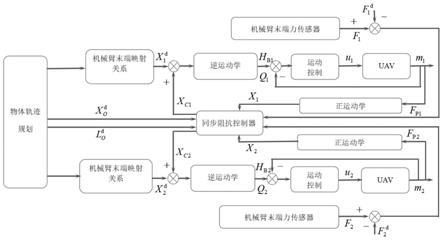
图2是本发明中带机械臂的无人机协同编队同步阻抗控制系统框图;
[0067]
图3是本发明中带机械臂的无人机协同抓取物体飞行仿真框图。
具体实施方式
[0068]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0069]
应当理解,当在本说明书和所附权利要求书中使用时,术语“包括”和“包含”指示所描述特征、整体、步骤、操作、元素和/或组件的存在,但并不排除一个或多个其它特征、整体、步骤、操作、元素、组件和/或其集合的存在或添加。
[0070]
还应当理解,在本发明说明书中所使用的术语仅仅是出于描述特定实施例的目的而并不意在限制本发明。如在本发明说明书和所附权利要求书中所使用的那样,除非上下文清楚地指明其它情况,否则单数形式的“一”、“一个”及“该”意在包括复数形式。
[0071]
还应当进一步理解,在本发明说明书和所附权利要求书中使用的术语“和/或”是指相关联列出的项中的一个或多个的任何组合以及所有可能组合,并且包括这些组合。
[0072]
如图1,图2所示,为带机械臂多无人机协同编队同步阻抗控制系统结构框图,主要包过同步阻抗控制,误差补偿两部分。通过阻抗控制在线计算接触力和力矩,动态调整期望阻尼参数,来实现与环境接触时的柔顺性,并实现在协同抓取物体时稳定飞行。本发明具体实施方式提供的一种带机械臂无人机协同编队阻抗控制方法,包括以下步骤:
[0073]
步骤s1,根据齐次方程及雅克比矩阵构建带机械臂无人机的运动学模型;带机械臂无人机的运动学模型具体如下:
[0074][0075][0076][0077][0078]
其中,p
ek
为第k架带机械臂无人机的机械臂末端位置矩阵;p
bk
为第k架带机械臂无人机位置矩阵;r
bk
为第k架带机械臂无人机的旋转矩阵,t为转置;为第k架带机械臂无人机的机械臂末端相对于该无人机的位置矩阵;ω
ek
为第k架带机械臂无人机的机械臂末端的角速度矩阵;ω
bk
为第k架带机械臂无人机的角速度矩阵;为第k架带机械臂无人机的机械臂末端相对于该无人机的角速度矩阵;v
ek
为第k架带机械臂无人机的机械臂末端速度;j
bk
为第k架带机械臂无人机的的雅克比矩阵;j
ekbk
为第k架带机械臂无人机的机械臂的雅克比矩阵;为第k架带机械臂无人机的位姿速度;为第k架带机械臂无人机的机械臂角度,式中k=1,2。
[0079]
所述
[0080][0081]vek
=[ν
ex ν
ez ν
eθ
]
t
;
ꢀꢀ
(7)
[0082]
其中为第k架带机械臂无人机的x方向的期望速度,为第k架带机械臂无人机的z方向的期望速度,为第k架带机械臂无人机的期望俯仰角速度,为第k架带机械臂无人机的机械臂第1个关节的期望角速度,为第k架带机械臂无人机的机械臂第2个关节的期望角速度,j
bk
为第k架带机械臂无人机的雅克比矩阵;j
ekbk
为第k架带机械臂无人机的机械臂的雅克比矩阵,ν
ex
为第k架带机械臂无人机的机械臂末端x方向的速度,ν
ez
为第k架带机械臂无人机的机械臂末端z方向的速度,ν
eθ
为第k架带机械臂无人机的机械臂末端俯仰角速度。
[0083]
还包括以下步骤:
[0084]
设
[0085][0086]
由上式得:
[0087][0088][0089]
式中,j
ζk
为第k架带机械臂无人机的雅克比矩阵j
bk
的第1到第3行和第1第2列数值,j
σk
为第k架带机械臂无人机的雅克比矩阵j
bk
的第1到第3行和第3列数值;
[0090]
设j
ηk
=[j
ζk j
ekbk
],由上式变换得:
[0091][0092]
式中,χk为第k架带机械臂无人机的对称增益矩阵;ek为第k架带机械臂无人机的机械臂末端位姿误差;而对于第k架带机械臂无人机的机械臂末端的位置y
ek
和偏航角ψ
ek
为无人机的位置y
bk
和偏航角ψ
bk
。
[0093]
步骤s2,根据步骤s1中建立的运动学模型并基于拉格朗日-欧拉方程建立带机械臂无人机的动力学模型。所述步骤s2中带机械臂无人机的动力学模型具体如下:
[0094][0095][0096]
x
b1
=[x z θ]
t
;
ꢀꢀ
(15)
[0097]
q1=[q
1 q2]
t
;
ꢀꢀ
(16)
[0098]
x
b2
=[x z θ]
t
;
ꢀꢀ
(17)
[0099]
q2=[q
1 q2]
t
;
ꢀꢀ
(18)
[0100]
其中x为带机械臂无人机x方向上的位置,z为带机械臂无人机z方向上的位置,θ为带机械臂无人机的俯仰角,q1、q2分别为第k架带机械臂无人机的机械臂第1个、第2个关节的角度;为第k架带机械臂无人机的惯性矩阵;为第k架带机械臂无人机的离心力和哥氏力构成的矩阵;为第k架带机械臂无人机的重力项构成的矩阵;u=[u
1 u2]
t
,u1=[f
x f
z τ
θ τ
q1 τ
q2
]
t
,u2=[f
x f
z τ
θ τ
q1 τ
q2
]
t
,f
x
、fz分别为带机械臂无人机在x、z方向的力,τ
θ
为带机械臂无人机的俯仰角力矩,τ
q1
、τ
q2
分别带机械臂无人机的第1个、第2个机械臂转角力矩;
[0101][0102]
式中j
bk
为第k架带机械臂无人机的雅克比矩阵,j
ekbk
为第k架带机械臂无人机的机械臂的雅克比矩阵,f
ek
为第k架带机械臂无人机的机械臂末端与环境接触时的接触力矩阵。
[0103]
对于第k架带机械臂无人机y方向的受力f
yk
及滚转角φk和偏航角ψk在x和z方向上
的力矩τ
xk
和τ
zk
其表达式为:
[0104][0105]
式中,为第k架带机械臂无人机的动能和势能之和的偏导数,为第k架带机械臂无人机在y方向上的速度偏导数,为第k架带机械臂无人机在x方向上的滚转角偏导数,为第k架带机械臂无人机在z方向上的偏航角偏导数,为第k架带机械臂无人机在y方向的位置偏导数,为第k架带机械臂无人机在x方向上的滚转角速度偏导数,为第k架带机械臂无人机在z方向上的偏航角速度偏导数。
[0106]
为了实现对带机械臂无人机的闭环控制需对带机械臂无人机动力学进行正逆运算,正动力学主要是为了计算出第k架带机械臂无人机位姿[x
k y
k z
k φ
k θ
k ψk]
t
及二自由度机械臂的两个转角qi(i=1,2)。其方程为:
[0107][0108]
其中通过积分进而输出x、z的实际位置和θ俯仰角以及q
1 q2角度,同理yk位置和滚转角φk及偏航角ψk进行正运算从而输出实际位置和实际姿态角度,则总体输出为
[0109]
步骤s3,参考带机械臂多无人机的抓取运动情况及受力和力矩情况,构建协同编队阻抗控制器;步骤s3中协同编队阻抗控制器的控制函数为:
[0110][0111][0112]
其中,m
sk
为第k架带机械臂无人机的期望惯量矩阵,b
sk
为第k架带机械臂无人机的期望阻尼矩阵,g
sk
为第k架带机械臂无人机的期望刚度矩阵,f
pk
为第k架带机械臂无人机的机械臂末端与环境接触力矩阵;x
pk
为第k架带机械臂无人机的机械臂末端期望位姿;x
sk
为第k架带机械臂无人机的机械臂末端实际位姿,为第k架带机械臂无人机的机械臂末端期望位姿速度,为第k架带机械臂无人机的机械臂末端实际位姿速度,为第k架带机械臂无人机的机械臂末端期望位姿加速度,为第k架带机械臂无人机的机械臂末端实际位姿加速度;
[0113]
根据映射关系,将带机械臂多无人机的机械臂末端位置和姿态互相映射和映射到
物体上,其方程为下式:
[0114][0115]
式中,x
p1-2
为第1架带机械臂无人机的机械臂末端位姿映射到第2架带机械臂无人机的机械臂末端位姿,x
p2-1
为第2架带机械臂无人机的机械臂末端位姿映射到第1架带机械臂无人机的机械臂末端位姿,x
12o
为第1架和第2架带机械臂无人机的机械臂末端映射到物体o的位姿,t
12
为第1架带机械臂无人机的机械臂末端到第2架带机械臂无人机的机械臂末端映射矩阵,t
21
为第2架带机械臂无人机的机械臂末端到第1架带机械臂无人机的机械臂末端映射矩阵,t
1o
为第1架带机械臂无人机的机械臂末端到物体o的映射矩阵,t
2o
为第2架带机械臂无人机的机械臂末端到物体o的映射矩阵;
[0116]
对于机械臂与被抓物体可得同步期望输入位姿为下式:
[0117][0118]
式中,x
po
为物体的期望位姿,为第1架带机械臂无人机的阻抗控制映射关系输出值,为第2架带机械臂无人机的阻抗控制映射关系输出值,为物体映射关系输出值。
[0119]
步骤s4,根据任务需求,设计参考物体轨迹,结合所述运动学模型的正运动控制及协同编队阻抗控制器的误差关系构建同步误差补偿控制器;步骤s4中带机械臂无人机的同步阻抗控制的实际位姿输出如下:
[0120][0121][0122][0123][0124]
式中,k
e1
为第1架带机械臂无人机的机械臂的实际位姿与阻抗控制同步输入位姿的误差补偿参数;k
a1
为第1架与第2架带机械臂无人机的机械臂同步位姿误差补偿参数;k
q1
为第1架与第2架带机械臂无人机的机械臂末端互相映射误差补偿参数;k
e2
为第2架带机械臂无人机的机械臂的实际位姿与阻抗控制同步输入位姿的误差补偿参数;k
a2
为第1架与第2架带机械臂无人机的机械臂同步位姿误差补偿参数;k
q2
为第2架带机械臂无人机的机械臂末端的误差补偿参数;为带机械臂无人机的机械臂末端物体位姿,x
c1
为第1架带机械臂无人机的同步阻抗控制的实际位姿输出;x
c2
为第2架带机械臂无人机的同步阻抗控制的实际位姿输出;x1为第1架带机械臂无人机的机械臂末端实际输出位姿;x2为第2架带机械臂无人机的机械臂末端实际输出位姿。
[0125]
该误差主要由机械臂位置控制的误差及阻抗控制的位置误差组成。而为了能稳定抓取物体,物体的运动轨迹与第1架和第2架带机械臂无人机的机械臂之间互相通过映射连
接,其表达式为:
[0126][0127]
式中,为物体位姿,为第1架带机械臂无人机的机械臂末端期望位姿,为第2架带机械臂无人机的机械臂末端期望位姿,t
o1
和t
o2
为物体与第1架和第2架带机械臂无人机的机械臂末端映射矩阵;根据上述公式可以得到物体的运动轨迹映射到第1架和第2架带机械臂无人机的机械臂上,进而实现第1架和第2架带机械臂无人机的机械臂的运动轨迹规划。当受到外力f的干扰时,由阻抗控制得到第1架和第2架带机械臂无人机的机械臂的位姿,将该位姿进行互相映射,从而实现带机械臂无人机在抓取物体时的协同运动。
[0128]
步骤s5:采用同步误差补偿控制器对带机械臂无人机的运动学模型进行修正补偿。设置同步阻抗控制器期望惯量矩阵m
s1
=diag(0.1 0.1 0.1 0.1 0.1 0.1),m
s2
=diag(0.1 0.1 0.1 0.1 0.1 0.1),初始阻尼矩阵b
s1
=diag(100 100 100 100 100 100),b
s2
=diag(100 100 100 100 100 100),刚度矩阵g
s1
=diag(1200 1200 1200 1200 1200 1200),g
s2
=diag(1200 1200 1200 1200 1200 1200)。通过matlab的仿真,如图3所示,当机械臂与环境进行交互时,所受到的力和力矩通过同步阻抗控制器进行柔顺控制,以达到带机械臂多无人机协同抓取物体稳定飞行。
[0129]
本领域普通技术人员可以意识到,结合本文中所公开的实施例描述的各示例的单元,能够以电子硬件、计算机软件或者二者的结合来实现,为了清楚地说明硬件和软件的可互换性,在上述说明中已经按照功能一般性地描述了各示例的组成。这些功能究竟以硬件还是软件方式来执行,取决于技术方案的特定应用和设计约束条件。专业技术人员可以对每个特定的应用来使用不同方法来实现所描述的功能,但是这种实现不应认为超出本发明的范围。
[0130]
在本技术所提供的实施例中,应该理解到,单元的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,例如多个单元可结合为一个单元,一个单元可拆分为多个单元,或一些特征可以忽略等。
[0131]
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围,其均应涵盖在本发明的权利要求和说明书的范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。