1.本发明涉及飞行器的避障飞行控制领域,涉及一种飞行器的避障飞行控制方法、装置及系统。
背景技术:
2.高超声速飞行器是一类可在临近空间范围内长时间以高超声速(ma》5)机动飞行的飞行器,具有飞行速度快、隐蔽性好、突防能力强、作战效能高等特点,在民用和军用领域都有巨大的潜在应用价值。高超声速飞行器的避障轨迹规划问题是具有高复杂度的非线性规划与控制问题。
3.在现有技术中,针对高超声速飞行器的轨迹规划任务,早期学者提出了间接法和直接法,近年来出现了遗传算法、粒子群算法等生物智能优化算法。其中,间接法利用庞特里亚金极小值原理将最优控制问题转换为哈密顿边值问题,具有高精度和最优解满足一阶最优性条件的优点,但是通过庞特里亚金极小值原理推导得到最优解的过程比较繁琐;直接法的特点是离散化轨迹规划问题,将原来的轨迹规划问题转化为非线性规划问题;生物智能优化算法在飞行器轨迹优化设计领域也得到越来越多的应用。
4.但是,现有技术仍存在下述缺陷:生物智能优化算法采用完全不同于传统规划算法的方式,对一些复杂问题具有独特优势,但应用于在线规划问题求解时还存在泛化能力较差,计算速度较慢的问题,从而导致应用于避障飞行控制时的实时性较差,进而导致控制效果较差。
5.因此,当前需要一种飞行器的避障飞行控制方法、装置及系统,从而克服现有技术中存在的上述缺陷。
技术实现要素:
6.针对现存的上述技术问题,本发明的目的在于提供一种飞行器的避障飞行控制方法、装置及系统,从而提升飞行器的避障飞行控制的实时性。
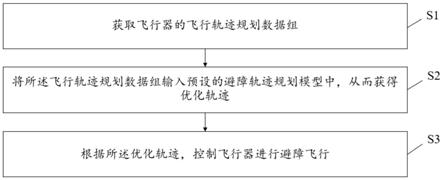
7.本发明提供了一种飞行器的避障飞行控制方法,该避障飞行控制方法包括:获取飞行器的飞行轨迹规划数据组;将所述飞行轨迹规划数据组输入预设的避障轨迹规划模型中,从而获得优化轨迹;所述避障轨迹规划模型是通过根据伪谱法仿真获得的数据为样本,对预设的深度神经网络进行训练而得;根据所述优化轨迹,控制飞行器进行避障飞行。
8.在一个实施例中,将所述飞行轨迹规划数据组输入预设的避障轨迹规划模型中,从而获得优化轨迹,具体包括:从所述飞行轨迹规划数据组获取飞行器的第一始末状态量组以及威胁区数据组;将所述第一始末状态量组以及所述威胁区数据组输入预设的避障轨迹规划模型中,从而获得优化轨迹。
9.在一个实施例中,所述避障轨迹规划模型的训练过程包括:获取预设的仿真模拟数据组、约束条件组以及目标函数;通过伪谱法,根据所述仿真模拟数据组、约束条件组以及目标函数,生成最优样本数据组;根据所述样本数据组,训练预设的深度神经网络,从而
获得避障轨迹规划模型。
10.在一个实施例中,在根据所述优化轨迹,控制飞行器进行避障飞行之后,所述避障飞行控制方法还包括:根据所述飞行器的实际飞行情况生成实时飞行轨迹;将所述优化轨迹和所述实时飞行轨迹发送给用户。
11.本发明还提供了一种飞行器的避障飞行控制装置,所述避障飞行控制装置包括数据获取单元、轨迹规划单元以及控制飞行单元,其中,所述数据获取单元用于获取飞行器的飞行轨迹规划数据组;所述轨迹规划单元用于将所述飞行轨迹规划数据组输入预设的避障轨迹规划模型中,从而获得优化轨迹;所述避障轨迹规划模型是通过根据伪谱法仿真获得的数据为样本,对预设的深度神经网络进行训练而得;所述控制飞行单元用于根据所述优化轨迹,控制飞行器进行避障飞行。
12.在一个实施例中,所述轨迹规划单元具体用于:从所述飞行轨迹规划数据组获取飞行器的第一始末状态量组以及威胁区数据组;将所述第一始末状态量组以及所述威胁区数据组输入预设的避障轨迹规划模型中,从而获得优化轨迹。
13.在一个实施例中,所述避障轨迹规划模型的训练过程包括:获取预设的仿真模拟数据组、约束条件组以及目标函数;通过伪谱法,根据所述仿真模拟数据组、约束条件组以及目标函数,生成最优样本数据组;根据所述样本数据组,训练预设的深度神经网络,从而获得避障轨迹规划模型。
14.在一个实施例中,所述避障飞行控制装置还包括轨迹展示单元,所述轨迹展示单元用于:根据所述飞行器的实际飞行情况生成实时飞行轨迹;将所述优化轨迹和所述实时飞行轨迹发送给用户。
15.本发明还提供了一种飞行器的避障轨迹规划系统,所述避障轨迹规划系统包括避障飞行控制模块以及数据存储模块,所述避障飞行控制模块和所述数据存储模块通信连接,所述数据存储模块用于存储所有数据,所述避障飞行控制模块用于根据所述数据存储模块中的所有数据,执行如前所述的飞行器的避障飞行控制方法。
16.在一个实施例中,所述避障轨迹规划系统还包括用户交互模块,所述用户交互模块包括触摸/不可触摸显示屏、输入键盘、指示灯、麦克风或扬声器。
17.相比于现有技术,本发明实施例具有如下有益效果:
18.本发明提供了一种飞行器的避障飞行控制方法、装置及系统,通过根据伪谱法仿真获得的数据为样本,对预设的深度神经网络进行训练以获取预设的避障轨迹规划模型,使用该避障轨迹规划模型生成优化轨迹,并根据该优化轨迹控制飞行器飞行,该避障飞行控制方法、装置及系统提升了避障轨迹规划的速度,从而提升了飞行器的避障飞行控制的实时性。
19.进一步地,本发明提供的一种飞行器的避障飞行控制方法、装置及系统还通过根据所述飞行器的实际飞行情况生成实时飞行轨迹,并将所述优化轨迹和所述实时飞行轨迹发送给用户,从而提升飞行器的避障飞行控制的交互性。
附图说明
20.下文将结合说明书附图对本发明进行进一步的描述说明,其中:
21.图1示出了根据本发明的一种飞行器的避障飞行控制方法的一个实施例的流程
图;
22.图2示出了根据本发明的一种飞行器的避障飞行控制方法的另一实施例的流程图;
23.图3示出了根据本发明的一种飞行器的避障飞行控制装置的一个实施例的结构图;
24.图4示出了根据本发明的一种飞行器的避障飞行控制系统的一个实施例的结构图。
具体实施方式
25.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
26.具体实施例一
27.本发明实施例首先描述了一种飞行器的避障飞行控制方法。图1示出了根据本发明的一种飞行器的避障飞行控制方法的一个实施例的流程图。如图1所示,该方法包括如下步骤:
28.s1:获取飞行器的飞行轨迹规划数据组。
29.为了能够对飞行器进行避障轨迹规划,首先需要获取飞行器的轨迹规划数据组以获知飞行器的各种初始状态数据以及威胁区数据,从而为后续的轨迹规划分析提供数据支持。
30.s2:将所述飞行轨迹规划数据组输入预设的避障轨迹规划模型中,从而获得优化轨迹。
31.在现有技术中,往往通过伪谱法等方法来进行避障轨迹规划,但伪谱法在实际应用中需要的计算时间较长,导致轨迹规划实时性较差,进而使得避障飞行控制效果不佳,对此,本发明实施例通过根据伪谱法仿真获得的数据为样本,对预设的深度神经网络进行训练,从而得到避障轨迹规划模型,并利用该模型对飞行器的实时数据进行分析计算,从而实现避障轨迹规划。
32.具体地,在一个实施例中,本步骤包括:从所述飞行轨迹规划数据组获取飞行器的第一始末状态量组以及威胁区数据组;将所述第一始末状态量组以及所述威胁区数据组输入预设的避障轨迹规划模型中,从而获得优化轨迹。
33.在一个实施例中,第一始末状态量组包括初始经度、初始纬度、初始高度、初始速度、初始航迹角以及航向角;威胁区数据组包括第一威胁区数据、第二威胁区数据以及第三威胁区数据,其中,每个威胁区数据包括半径变化范围以及中心经纬度。
34.在一个实施例中,所述避障轨迹规划模型的训练过程包括:获取预设的仿真模拟数据组、约束条件组以及目标函数;通过伪谱法,根据所述仿真模拟数据组、约束条件组以及目标函数,生成最优样本数据组;根据所述样本数据组,训练预设的深度神经网络,从而获得避障轨迹规划模型。
35.为了进一步描述避障轨迹规划模型的训练过程,本发明实施例将以一种实际应用
情况为例进行说明,具体地,建立高超声速飞行器三自由度再入模型(需要同时考虑始末位置随机、威胁区随机的情况),采用伪谱法进行离线轨迹优化以获取大量最优轨迹数据样本(轨迹的状态量和控制量序列),随后,以轨迹的状态量和控制量序列为输入,以当前时刻的轨迹控制为输出,建立深度神经网络模型,并基于最优轨迹数据样本库训练深度神经网络模型的参数,以获得能够预测轨迹控制输出的最佳神经网络模型。
36.在上述过程中,针对高超声速飞行器三自由度再入模型,动力滑翔再入的无量纲运动方程为:
[0037][0038]
其中,z、u和τ分别代表无量纲化处理后的地心距、速度和时间,对应的无量纲基准分别为r0、和(r0为地球半径、g0为引力加速度);θ和为经度和纬度;航迹倾角γ是速度向量与当地水平面的夹角,向上为正;速度方位角ψ为速度向量在当地水平面投影与正北方向的夹角,顺时针旋转为正。和分别为无量纲升力和阻力,且有
[0039][0040]
其中,m和s
ref
分别为飞行器的质量和气动参考面积;ρ为大气密度;c
l
和cd分别为升力和阻力系数。
[0041]
在建立高超声速飞行器三自由度再入模型后,即可通过伪谱法生成大量最优轨迹数据样本,本发明实施例采用基于chebyshev伪谱法的优化轨迹样本生成方法,chebyshev伪谱法的基本求解思路为:不同于传统的直接法,在legendre-gauss点上将连续时间状态变量和控制变量做离散化处理,并将离散点作为节点,通过构造largrange插值多项式来逼近实际飞行的状态变量和控制变量;然后,对多项式求导来逼近状态变量对时间的导数,将微分方程约束转换为代数约束;最后,通过数值积分计算性能指标中的积分项,从而将最优控制问题转化为非线性规划问题。在一个实施例中,采用chebyshev伪谱法生成1000条弹道(即,最后将获得1000组最优轨迹数据样本)。
[0042]
在上述过程中,设最优控制问题的时间区间为[t0,tf],采用gauss伪谱法则需将时间区间转换到[-1,1],因此对时间变量t作变换:
[0043]
[0044]
gauss伪谱法的离散点为n阶legendre多项式的根,legendre多项式为:
[0045][0046]
legendre-gauss点分布在区间(-1,1),增加τ0=-1,得到区间[-1,1),共n 1个插值点。以lagrange插值多项式作为基函数描述控制变量以及状态变量:
[0047][0048][0049]
状态变量的一阶微分可以通过求导来近似得到,同时将动力学微分方程约束转化为代数约束。
[0050][0051]
所以动力学方程满足:
[0052][0053]
式中,n=1,
…
,n。
[0054]
终端状态xf可通过拉格朗日积分得到:
[0055][0056]
其中,为gauss权重。
[0057]
gauss伪谱法中的性能指标函数为:
[0058][0059]
在通过伪谱法获得大量最优轨迹数据样本后,即可以最优轨迹数据样本为训练样本,对预设的深度神经网络进行训练,从而获得避障轨迹规划模型。具体地,根据带威胁区的工况合理地提取最优样本数据组中的有效特征并完成归一化的工作,随后将归一化后所得数据(最优状态序列)送入预设的深度神经网络进行训练。其中,预设的深度神经网络的具体设置如下:神经网络共8层,每层的神经元个数为500个,激活函数采用的是sigmoid函
数优化器采用的是adam优化器,学习率为0.0001,最终神经网络的损失函数的loss值稳定在1e-4的水平。
[0060]
s3:根据所述优化轨迹,控制飞行器进行避障飞行。
[0061]
在实时获得优化轨迹后,根据该优化轨迹生成控制指令,并根据该控制指令控制飞行器进行避障飞行。
[0062]
本发明实施例描述了一种飞行器的避障飞行控制方法,通过根据伪谱法仿真获得的数据为样本,对预设的深度神经网络进行训练以获取预设的避障轨迹规划模型,使用该避障轨迹规划模型生成优化轨迹,并根据该优化轨迹控制飞行器飞行,该避障飞行控制方法提升了避障轨迹规划的速度,从而提升了飞行器的避障飞行控制的实时性。
[0063]
具体实施例二
[0064]
更进一步地,本发明实施例还描述了一种飞行器的避障飞行控制方法。图2示出了根据本发明的一种飞行器的避障飞行控制方法的另一实施例的流程图。
[0065]
如图2所示,该避障飞行控制方法包括如下步骤:
[0066]
a1:获取飞行器的飞行轨迹规划数据组。
[0067]
为了能够对飞行器进行避障轨迹规划,首先需要获取飞行器的轨迹规划数据组以获知飞行器的各种初始状态数据以及威胁区数据,从而为后续的轨迹规划分析提供数据支持。
[0068]
a2:将所述飞行轨迹规划数据组输入预设的避障轨迹规划模型中,从而获得优化轨迹。
[0069]
在现有技术中,往往通过伪谱法等方法来进行避障轨迹规划,但伪谱法在实际应用中需要的计算时间较长,导致轨迹规划实时性较差,进而使得避障飞行控制效果不佳,对此,本发明实施例通过根据伪谱法仿真获得的数据为样本,对预设的深度神经网络进行训练,从而得到避障轨迹规划模型,并利用该模型对飞行器的实时数据进行分析计算,从而实现避障轨迹规划。
[0070]
具体地,在一个实施例中,本步骤包括:从所述飞行轨迹规划数据组获取飞行器的第一始末状态量组以及威胁区数据组;将所述第一始末状态量组以及所述威胁区数据组输入预设的避障轨迹规划模型中,从而获得优化轨迹。
[0071]
在一个实施例中,第一始末状态量组包括初始经度、初始纬度、初始高度、初始速度、初始航迹角以及航向角;威胁区数据组包括第一威胁区数据、第二威胁区数据以及第三威胁区数据,其中,每个威胁区数据包括半径变化范围以及中心经纬度。
[0072]
在一个实施例中,所述避障轨迹规划模型的训练过程包括:获取预设的仿真模拟数据组、约束条件组以及目标函数;通过伪谱法,根据所述仿真模拟数据组、约束条件组以及目标函数,生成最优样本数据组;根据所述样本数据组,训练预设的深度神经网络,从而获得避障轨迹规划模型。
[0073]
为了进一步描述避障轨迹规划模型的训练过程,本发明实施例将以一种实际应用情况为例进行说明,具体地,建立高超声速飞行器三自由度再入模型(需要同时考虑始末位置随机、威胁区随机的情况),采用伪谱法进行离线轨迹优化以获取大量最优轨迹数据样本(轨迹的状态量和控制量序列),随后,以轨迹的状态量和控制量序列为输入,以当前时刻的轨迹控制为输出,建立深度神经网络模型,并基于最优轨迹数据样本库训练深度神经网络
模型的参数,以获得能够预测轨迹控制输出的最佳神经网络模型。
[0074]
在上述过程中,针对高超声速飞行器三自由度再入模型,动力滑翔再入的无量纲运动方程为:
[0075][0076]
其中,z、u和τ分别代表无量纲化处理后的地心距、速度和时间,对应的无量纲基准分别为r0、和(r0为地球半径、g0为引力加速度);θ和为经度和纬度;航迹倾角γ是速度向量与当地水平面的夹角,向上为正;速度方位角ψ为速度向量在当地水平面投影与正北方向的夹角,顺时针旋转为正。和分别为无量纲升力和阻力,且有
[0077][0078]
其中,m和s
ref
分别为飞行器的质量和气动参考面积;ρ为大气密度;c
l
和cd分别为升力和阻力系数。
[0079]
在建立高超声速飞行器三自由度再入模型后,即可通过伪谱法生成大量最优轨迹数据样本,本发明实施例采用基于chebyshev伪谱法的优化轨迹样本生成方法,chebyshev伪谱法的基本求解思路为:不同于传统的直接法,在legendre-gauss点上将连续时间状态变量和控制变量做离散化处理,并将离散点作为节点,通过构造largrange插值多项式来逼近实际飞行的状态变量和控制变量;然后,对多项式求导来逼近状态变量对时间的导数,将微分方程约束转换为代数约束;最后,通过数值积分计算性能指标中的积分项,从而将最优控制问题转化为非线性规划问题。在一个实施例中,采用chebyshev伪谱法生成1000条弹道(即,最后将获得1000组最优轨迹数据样本)。
[0080]
在上述过程中,设最优控制问题的时间区间为[t0,tf],采用gauss伪谱法则需将时间区间转换到[-1,1],因此对时间变量t作变换:
[0081][0082]
gauss伪谱法的离散点为n阶legendre多项式的根,legendre多项式为:
[0083][0084]
legendre-gauss点分布在区间(-1,1),增加τ0=-1,得到区间[-1,1),共n 1个插
值点。以lagrange插值多项式作为基函数描述控制变量以及状态变量:
[0085][0086][0087]
状态变量的一阶微分可以通过求导来近似得到,同时将动力学微分方程约束转化为代数约束。
[0088][0089]
所以动力学方程满足:
[0090][0091]
式中,n=1,
…
,n。
[0092]
终端状态xf可通过拉格朗日积分得到:
[0093][0094]
其中,为gauss权重。
[0095]
gauss伪谱法中的性能指标函数为:
[0096][0097]
在通过伪谱法获得大量最优轨迹数据样本后,即可以最优轨迹数据样本为训练样本,对预设的深度神经网络进行训练,从而获得避障轨迹规划模型。具体地,根据带威胁区的工况合理地提取最优样本数据组中的有效特征并完成归一化的工作,随后将归一化后所得数据(最优状态序列)送入预设的深度神经网络进行训练。其中,预设的深度神经网络的具体设置如下:神经网络共8层,每层的神经元个数为500个,激活函数采用的是sigmoid函数优化器采用的是adam优化器,学习率为0.0001,最终神经网络的损失函数的loss值稳定在1e-4的水平。
[0098]
a3:根据所述优化轨迹,控制飞行器进行避障飞行。
[0099]
在实时获得优化轨迹后,根据该优化轨迹生成控制指令,并根据该控制指令控制飞行器进行避障飞行。
[0100]
a4:根据所述飞行器的实际飞行情况生成实时飞行轨迹。
[0101]
为了进一步提升飞行器的避障飞行控制的交互性和直观性,在生成控制指令以控制飞行器进行避障飞行后,根据飞行器的实际飞行情况生成实时飞行轨迹,以作为控制飞行的结果反馈。
[0102]
a5:将所述优化轨迹和所述实时飞行轨迹发送给用户。
[0103]
在获得实时飞行轨迹后,将所述优化轨迹和所述实时飞行轨迹发送给用户,从而使得用户能够实时获知优化控制结果和实际控制结果。
[0104]
本发明实施例描述了一种飞行器的避障飞行控制方法,通过根据伪谱法仿真获得的数据为样本,对预设的深度神经网络进行训练以获取预设的避障轨迹规划模型,使用该避障轨迹规划模型生成优化轨迹,并根据该优化轨迹控制飞行器飞行,该避障飞行控制方法提升了避障轨迹规划的速度,从而提升了飞行器的避障飞行控制的实时性;进一步地,本发明实施例描述的一种飞行器的避障飞行控制方法还通过根据所述飞行器的实际飞行情况生成实时飞行轨迹,并将所述优化轨迹和所述实时飞行轨迹发送给用户,从而提升飞行器的避障飞行控制的交互性。
[0105]
具体实施例三
[0106]
除上述方法外,本发明实施例还描述了一种飞行器的避障飞行控制装置。图3示出了根据本发明的一种飞行器的避障飞行控制装置的一个实施例的结构图。
[0107]
如图所示,该避障飞行控制装置包括数据获取单元11、轨迹规划单元12以及控制飞行单元13。
[0108]
其中,数据获取单元11用于获取飞行器的飞行轨迹规划数据组。
[0109]
轨迹规划单元12用于将所述飞行轨迹规划数据组输入预设的避障轨迹规划模型中,从而获得优化轨迹。避障轨迹规划模型是通过根据伪谱法仿真获得的数据为样本,对预设的深度神经网络进行训练而得。在一个实施例中,所述轨迹规划单元具体用于:从所述飞行轨迹规划数据组获取飞行器的第一始末状态量组以及威胁区数据组;将所述第一始末状态量组以及所述威胁区数据组输入预设的避障轨迹规划模型中,从而获得优化轨迹。在一个实施例中,所述避障轨迹规划模型的训练过程包括:获取预设的仿真模拟数据组、约束条件组以及目标函数;通过伪谱法,根据所述仿真模拟数据组、约束条件组以及目标函数,生成最优样本数据组;根据所述样本数据组,训练预设的深度神经网络,从而获得避障轨迹规划模型。
[0110]
控制飞行单元13用于根据所述优化轨迹,控制飞行器进行避障飞行。
[0111]
在一个实施例中,所述避障飞行控制装置还包括轨迹展示单元,所述轨迹展示单元用于:根据所述飞行器的实际飞行情况生成实时飞行轨迹;将所述优化轨迹和所述实时飞行轨迹发送给用户。
[0112]
本发明实施例描述了一种飞行器的避障飞行控制装置,通过根据伪谱法仿真获得的数据为样本,对预设的深度神经网络进行训练以获取预设的避障轨迹规划模型,使用该避障轨迹规划模型生成优化轨迹,并根据该优化轨迹控制飞行器飞行,该避障飞行控制装置提升了避障轨迹规划的速度,从而提升了飞行器的避障飞行控制的实时性;进一步地,本发明实施例描述的一种飞行器的避障飞行控制装置还通过根据所述飞行器的实际飞行情况生成实时飞行轨迹,并将所述优化轨迹和所述实时飞行轨迹发送给用户,从而提升飞行
器的避障飞行控制的交互性。
[0113]
具体实施例四
[0114]
除上述方法和装置外,本发明还描述了一种飞行器的避障飞行控制系统。图4示出了根据本发明的一种飞行器的避障飞行控制系统的一个实施例的结构图。
[0115]
如图所示,该避障轨迹规划系统包括避障飞行控制模块1以及数据存储模块2,所述避障飞行控制模块1和所述数据存储模块2通信连接,所述数据存储模块2用于存储所有数据,所述避障飞行控制模块1用于根据所述数据存储模块2中的所有数据,执行如前所述的飞行器的避障飞行控制方法。
[0116]
在一个实施例中,所述避障轨迹规划系统还包括用户交互模块,所述用户交互模块包括触摸/不可触摸显示屏、输入键盘、指示灯、麦克风或扬声器。
[0117]
本发明实施例描述了一种飞行器的避障飞行控制系统,通过根据伪谱法仿真获得的数据为样本,对预设的深度神经网络进行训练以获取预设的避障轨迹规划模型,使用该避障轨迹规划模型生成优化轨迹,并根据该优化轨迹控制飞行器飞行,该避障飞行控制系统提升了避障轨迹规划的速度,从而提升了飞行器的避障飞行控制的实时性;进一步地,本发明实施例描述的一种飞行器的避障飞行控制系统还通过根据所述飞行器的实际飞行情况生成实时飞行轨迹,并将所述优化轨迹和所述实时飞行轨迹发送给用户,从而提升飞行器的避障飞行控制的交互性。
[0118]
以上所述的具体实施例,对本发明的目的、技术方案和有益效果进行了进一步的详细说明,应当理解,以上所述仅为本发明的具体实施例而已,并不用于限定本发明的保护范围。特别指出,对于本领域技术人员来说,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
