1.本实用新型涉及一种清洗设备,更特别地涉及一种光掩模清洗设备。
背景技术:
2.在制作集成电路的过程中,利用光掩模(reticle)与光刻工艺,将光掩模的图形转印于晶圆上。光掩模为极精密的高价组件,若表面受到微粒沾染将会导致光刻成像缺陷。故光掩模上会设置一层光掩模护膜(pellicle),以免于光掩模受到微尘或挥发性气体的污染。落在光掩模护膜上的微粒不会影响光掩模的成像。
3.然而光掩模长久使用下来仍会累积脏污,特别是光掩模护膜两边的外侧。
技术实现要素:
4.本实用新型的目的在于解决现有的光掩模清洁的多种问题,提出一种光掩模清洗设备。
5.为达上述目的及其他目的,本实用新型提出一种光掩模清洗设备,包括:分隔板,具有至少一个清洁口;升降清洁模块,设置于该分隔板的下方,该升降清洁模块包括升降动力构件及卷布构件,该升降动力构件动力连接该卷布构件,驱动该卷布构件的顶端通过该清洁口;以及夹持模块,设置于该分隔板的上方,用以夹持待清洗物体。
6.可选地,该清洁口的数量为两个,彼此相隔预定距离。
7.可选地,该卷布构件包括依序排列的送布轮、接触部及收布轮,该升降动力构件驱动该接触部通过该清洁口。
8.可选地,该夹持模块包括夹头及动力臂,该动力臂动力连接该夹头并驱动该夹头相对该清洁口移动。
9.可选地,还包括控制模块及实时静电监控模块,该控制模块讯连接该升降清洁模块及该实时静电监控模块。
10.可选地,还包括纠偏模块,信号连接该控制模块。
11.可选地,还包括框架及至少一组移动轮,该升降清洁模块及该分隔板设置于该框架中,该至少一组移动轮设置于该框架底部。
12.借此,本实用新型的光掩模清洗设备可清洗光掩模的两侧,并且清洁过程不会受到已去除的微粒干扰,确保光掩模在清洗的过程中维持高洁净度。
13.为能够更进一步了解本实用新型的特征及技术内容,请参阅以下有关实用新型的详细说明与附图,但是此说明与附图仅用来说明本实用新型,而非对本实用新型的权利范围作任何的限制。
附图说明
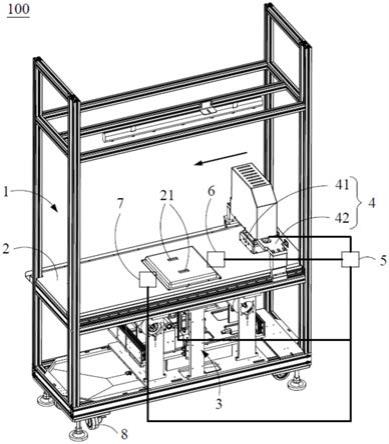
14.图1为本实用新型实施例的光掩模清洗设备的立体示意图;
15.图2为本实用新型实施例的升降清洁模块的立体示意图。
16.【附图标记】
17.100 光掩模清洗设备
18.1 框架
19.2 分隔板
20.21 清洁口
21.3 升降清洁模块
22.31 升降动力构件
23.32 卷布构件
24.321 送布轮
25.322 接触部
26.323 收布轮
27.4 夹持模块
28.41 夹头
29.42 动力臂
30.5 控制模块
31.6 实时静电监控模块
32.7 纠偏模块
33.8 移动轮
34.t 清洁布
具体实施方式
35.为了充分了解本实用新型,通过下述具体的实施例,并配合附图,对本实用新型做详细说明。本领域技术人员可由本说明书所公开的内容了解本实用新型的目的、特征及效果。须注意的是,本实用新型可通过其他不同的具体实施例加以施行或应用,本说明书中的各项细节也可基于不同观点与应用,在不背离本实用新型的实用新型点下进行各种修饰与变更。另外,本实用新型的附图仅为简单示意说明,并非依实际尺寸的描绘。以下的实施方式将进一步详细说明本实用新型的相关技术内容,但所公开的内容并非用以限制本实用新型的权利要求。说明如下:
36.如图1及图2所示,本实用新型实施例的光掩模清洗设备100,包含:分隔板2、升降清洁模块3及夹持模块4。
37.分隔板2上下分隔负责清洁的升降清洁模块3及负责夹持的夹持模块4。分隔板2具有至少一个清洁口21。
38.升降清洁模块3设置于分隔板2的下方。升降清洁模块3包括升降动力构件31及卷布构件32,升降动力构件31动力连接卷布构件32,如图2所示,当需要清洁光掩模(图中未示)时,升降动力构件31驱动卷布构件32的顶端通过清洁口21。升降动力构件31例如为步进电机或伺服电机等电致动构件。
39.夹持模块4设置于分隔板2的上方,用以夹持待清洗物体(例如为光掩模,然而本实用新型不限于此)。在本实施例中,夹持模块4以气流吸取的方式自光掩模的背面夹持光掩模,然而本实用新型不限于此,可为力学上以机械直接接触夹持,或利用电磁及其他科学原
理夹持光掩模,使光掩模的侧边位于清洁口21。
40.由于卷布构件32只有其顶端被驱动时才会通过清洁口21接触到光掩模,其他时候卷布构件32都位于清洁口21之下并被分隔板2所分隔,因此,卷布构件32清洁完毕后的所擦拭的脏污不会重新进入到分隔板2的上方再度污染干净的光掩模,确保光掩模在清洗的过程中维持高洁净度。
41.进一步地,在本实施例中,清洁口21的数量为两个,彼此相隔预定距离,可供卷布构件32同时清洁光掩模的两侧。然而本实用新型不限于此,清洁口21的数量、形状及分布可视需求加以改变。
42.进一步地,在本实施例中,如图2所示,卷布构件32包括依序排列的送布轮321、接触部322及收布轮323。清洁布t通过送布轮321送入卷布构件32中,并依序经过接触部322并由收布轮323卷收。升降动力构件31驱动接触部322向上抬起以通过清洁口21,覆在接触部322的清洁布t擦拭光掩模的两侧。清洁布t例如是无尘卷布(防静电材料电子级无尘室专用擦拭布),然而本实用新型不限于此,卷布构件32的构造也可加以改变。
43.进一步地,在本实施例中,如图1所示,夹持模块4包括夹头41及动力臂42,动力臂42动力连接夹头41并驱动夹头41相对清洁口21移动(如箭头所示)。动力臂42例如是步进电机或伺服电机等电致动构件。通过可移动的夹持模块4,使清洁口21可缩小至一个小孔,夹头41相对清洁口21移动便可使光掩模的侧边接受到卷布构件32的擦拭。然而本实用新型不限于此,在其他实施例中,夹持模块4也可为固定不动,清洁口21则呈长条沟状(长度大于等于光掩模的侧边长度),卷布构件32在沟状的清洁口21中来回移动,或升降动力构件31驱动卷布构件32的长条顶端(匹配沟状的清洁口21)通过清洁口。
44.进一步地,如图1所示,在本实施例中,光掩模清洗设备100还包括控制模块5及实时静电监控模块6,控制模块5信号连接升降清洁模块3、动力臂42及实时静电监控模块6。实时静电监控模块6侦测环境、光掩模或设备的静电,控制模块5依据实时静电监控模块6的侦测数据决定是否停止清洁或让实时静电监控模块6实时释放中和用的电荷。控制模块5例如是控制芯片或控制电路。
45.进一步地,如图1所示,在本实施例中,光掩模清洗设备100还包括纠偏模块7,信号连接控制模块5。控制模块5依据纠偏模块7的侦测信号决定夹持模块4所夹持的光掩模是否产生偏斜,而控制升降清洁模块3停止清洁、动力臂42调整位置或归回原位。纠偏模块7例如是光学纠偏原理的装置,利用发出的光线(通常为红外线)并判断其反射信号或另一侧的接收信号是否有异常,借此判定光掩模在移动的过程中是否偏斜。然而本实用新型不限于此,纠偏模块7可为应用其他原理的纠偏装置。
46.进一步地,如图1所示,在本实施例中,光掩模清洗设备100还包括框架1及至少一组移动轮8,升降清洁模块3及分隔板2设置于框架1中,移动轮8设置于框架1底部。框架1使光掩模清洗设备100各部件一体化,移动轮8则可使各部件连同框架1一起移动。
47.本实用新型在上文中已以较佳实施例公开,然而本领域技术人员应理解的是,所述实施例仅用于描绘本实用新型,而不应解读为限制本实用新型的范围。应注意的是,凡是与所述实施例等效的变化与置换,均应设定为涵盖在本实用新型的范围内。因此,本实用新型的保护范围当以权利要求书所界定的内容范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
