一种3d相机引导焊接机械手
技术领域
1.本实用新型涉及焊接机械手技术领域,具体是一种3d相机引导焊接机械手。
背景技术:
2.焊接也称作熔接、镕接,是一种以加热、高温或者高压的方式接合金属或其他热塑性材料如塑料的制造工艺及技术,焊接机械手就是一种用于实现自动化焊接的机械结构。
3.在中国专利申请号(cn201821878841.2)公开了一种多角度焊接机械手,该结构具有多个进给方向,实现精确且多角度的喷涂、焊接,但是该结构的控制难度高,缺少对连接件的减速设备,导致设备实际使用时的精确度下降,因此,本领域技术人员提供了一种3d相机引导焊接机械手,以解决上述背景技术中提出的问题。
技术实现要素:
4.本实用新型的目的在于提供一种3d相机引导焊接机械手,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种3d相机引导焊接机械手,包括底座,所述底座的上端安装有电机箱,所述电机箱的上端转动安装有转盘,所述转盘的上表面靠近外缘位置处转动安装有第一连接臂,所述第一连接臂的上端活动安装有第二连接臂,所述第二连接臂的一端固定安装有第一电机,所述第一电机的输出端安装有第三连接臂,所述第三连接臂的另一端安装有焊接头,所述第一连接臂的两端对应转盘和第二连接臂的连接处均设有减速组件;
6.所述减速组件包括固定安装在第一连接臂上的减速箱,所述减速箱的外端安装有驱动电机,所述驱动电机的输出端延伸至减速箱的内部并安装有第一斜齿轮,所述减速箱的内部位于第一斜齿轮的相对面转动安装有输出轴,所述输出轴上安装有第二斜齿轮,所述第二斜齿轮的一侧安装有l形架,所述l形架的两端安装有相互平行的安装导脚,两个所述安装导脚之间转动安装有联动轴,所述联动轴的两端分别安装有与第二斜齿轮、第一斜齿轮啮合的联动齿轮。
7.作为本实用新型更进一步的方案:所述第二连接臂为一种l型结构,且第二连接臂与第一电机之间通过螺栓固定连接。
8.作为本实用新型更进一步的方案:所述底座的底部安装有缓冲垫,所述缓冲垫的下方安装有安装板,所述安装板靠近四角位置处均开设有螺纹安装孔。
9.作为本实用新型更进一步的方案:所述电机箱的内部安装有第二电机,所述第二电机的输出端安装有转轴,所述转轴的上端通过焊接与转盘的下表面固定连接。
10.作为本实用新型更进一步的方案:所述转盘的下表面等间距安装有滑块,所述电机箱的上端开设有与滑块滑动连接的环形滑槽。
11.作为本实用新型更进一步的方案:所述第一连接臂、第二连接臂、第三连接臂的表面均设有防腐层,所述防腐层为一种环氧树脂材质的构件。
12.与现有技术相比,本实用新型的有益效果是:本实用新型结构简单、设计新颖,通过第一连接臂、第二连接臂、第三连接臂的设置实现焊接头的角度活动,在减速组件的作用下,降低驱动电机的输出转速,从而使得第一连接臂、第二连接臂的转速控制更加稳定,有利于提高设备焊接时的精确度。
附图说明
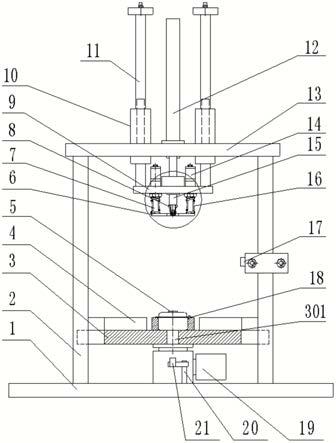
13.图1为一种3d相机引导焊接机械手的结构示意图;
14.图2为一种3d相机引导焊接机械手中减速组件的结构示意图;
15.图3为一种3d相机引导焊接机械手中转盘的安装结构示意图。
16.图中:1、底座;2、电机箱;3、转盘;4、第一连接臂;5、第二连接臂;6、第一电机;7、第三连接臂;8、焊接头;9、减速组件;91、减速箱;92、驱动电机;93、第一斜齿轮;94、第二斜齿轮;95、输出轴;96、l形架;97、安装导脚;98、联动轴;99、联动齿轮;10、第二电机;11、转轴。
具体实施方式
17.请参阅图1~3,本实用新型实施例中,一种3d相机引导焊接机械手,包括底座1,底座1的上端安装有电机箱2,电机箱2的上端转动安装有转盘3,转盘3的上表面靠近外缘位置处转动安装有第一连接臂4,第一连接臂4的上端活动安装有第二连接臂5,第二连接臂5的一端固定安装有第一电机6,第一电机6的输出端安装有第三连接臂7,第三连接臂7的另一端安装有焊接头8,第一连接臂4的两端对应转盘3和第二连接臂5的连接处均设有减速组件9,通过第一连接臂4与转盘3之间的转动连接以及第二连接臂5与第一连接臂4之间的转动连接,实现设备多角度活动,启动第一电机6使得第三连接臂7转动,从而实现焊接头8的转动,进一步提高设备的灵活性;
18.减速组件9包括固定安装在第一连接臂4上的减速箱91,减速箱91的外端安装有驱动电机92,驱动电机92的输出端延伸至减速箱91的内部并安装有第一斜齿轮93,减速箱91的内部位于第一斜齿轮93的相对面转动安装有输出轴95,输出轴95上安装有第二斜齿轮94,第二斜齿轮94的一侧安装有l形架96,l形架96的两端安装有相互平行的安装导脚97,两个安装导脚97之间转动安装有联动轴98,联动轴98的两端分别安装有与第二斜齿轮94、第一斜齿轮93啮合的联动齿轮99,通过驱动电机92带动第一斜齿轮93转动,通过第一斜齿轮93带动其中一个联动齿轮99转动,继而使得联动轴98带动另一个联动齿轮99转动,从而使得第二斜齿轮94带动输出轴95转动,实现输出轴95的减速,降低驱动电机92的输出转速,从而使得第一连接臂4、第二连接臂5的转速控制更加稳定,有利于提高设备焊接时的精确度。
19.在图1中,第二连接臂5为一种l型结构,且第二连接臂5与第一电机6之间通过螺栓固定连接,主要起到连接作用。
20.在图1中,底座1的底部安装有缓冲垫,主要起到缓冲作用,缓冲垫的下方安装有安装板,安装板靠近四角位置处均开设有螺纹安装孔,便于设备的安装。
21.在图3中,电机箱2的内部安装有第二电机10,第二电机10的输出端安装有转轴11,转轴11的上端通过焊接与转盘3的下表面固定连接,通过第二电机10带动转盘3转动,从而使得第一连接臂4随之运动。
22.在图3中,转盘3的下表面等间距安装有滑块,电机箱2的上端开设有与滑块滑动连
接的环形滑槽,通过滑块与环形滑槽之间的滑动连接,提高转盘3转动时的稳定性。
23.在图1中,第一连接臂4、第二连接臂5、第三连接臂7的表面均设有防腐层,防腐层为一种环氧树脂材质的构件,延长设备的实用寿命。
24.本实用新型的工作原理是:本实用新型结构简单、设计新颖,在使用时,通过第二电机10带动转盘3转动,从而使得第一连接臂4随之运动,通过滑块与环形滑槽之间的滑动连接,提高转盘3转动时的稳定性,通过第一连接臂4与转盘3之间的转动连接以及第二连接臂5与第一连接臂4之间的转动连接,实现设备多角度活动,启动第一电机6使得第三连接臂7转动,从而实现焊接头8的转动,进一步提高设备的灵活性,通过驱动电机92带动第一斜齿轮93转动,通过第一斜齿轮93带动其中一个联动齿轮99转动,继而使得联动轴98带动另一个联动齿轮99转动,从而使得第二斜齿轮94带动输出轴95转动,实现输出轴95的减速,降低驱动电机92的输出转速,从而使得第一连接臂4、第二连接臂5的转速控制更加稳定,有利于提高设备焊接时的精确度。
25.以上所述的,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。