1.本实用新型涉及放料设备领域,具体涉及一种片状工件对合放料机构。
背景技术:
2.工业制造过程中,很多片状产品或半成品,需要工件的正面和相邻工件的正面对合后放入包装箱,这样装箱的原因有:工件正面、背面的结构不同(例如正面是光面、而反面具有凸出结构),若工件的正面和相邻工件的背面直接接触,在装箱或运输过程中容易产生正面结构的损伤。
3.但是,在批量生产制造这类工件过程中,例如注塑、冲压等环节,工件从设备出来的方向都是一致的,通过人工装箱操作,需要人工记住每隔一次就需要换向装箱,若是遗忘,还需要仔细核对工件的正反面再进行装箱,导致装箱率低下,且容易发生错放的情况,影响产品质量。
技术实现要素:
4.本实用新型的目的在于提供一种结构紧凑且利于提高装箱质量的片状工件对合放料机构。
5.本实用新型解决上述问题所采用的技术方案是:
6.一种片状工件对合放料机构,包括机架,所述机架上依次设置有翻料机构和送料机构,翻料机构包括用于片状工件放置的夹料臂和用于驱动夹料臂水平方向上转动的第一驱动装置,送料机构包括置物架和用于驱动置物架水平方向上移动的直线驱动装置,机架上固定有用于驱动翻料机构竖直方向上转动的第二驱动装置,以使得夹料臂上的片状工件能够位于置物架的移动轨迹上。
7.使用时,通过第一驱动装置使得夹料臂水平方向上转动180
°
,从而实现夹料臂上片状工件的翻面操作,再通过第二驱动装置使得翻料机构竖直方向上转动90
°
,使得夹料臂转动至置物架的正上方,此时夹料臂上的片状工件位于置物架的移动轨迹上,然后通过直线驱动装置驱动置物架水平方向上直线移动,使得置物架将片状工件从夹料臂上推出脱离并使其随同置物架直线移动,直至片状工件被置物架推送至指定位置。
8.作为上述技术方案的进一步改进,所述夹料臂呈u形,夹料臂上两个直臂部的相对的位置上均开设有夹槽,片状工件位于夹料臂上时,片状工件的两端分别位于两个夹槽内,从而在夹料臂进行竖直方向和水平方向上进行转动的时候带动片状工件进行输送和翻面。
9.作为上述技术方案的进一步改进,所述置物架包括架体和两个用于推送片状工件的推块,架体呈u形状,两个推块以架体的轴线为对称线呈左右对称固定于架体上。
10.作为上述技术方案的进一步改进,所述机架上固定有两个导正板,两个导正板分别位于夹料臂的移动轨迹的两侧,两个导正板之间的距离在竖直方向上从上往下依次由宽变窄并在水平方向上沿夹料臂上片状工件被置物架推出的方向依次由宽变窄。通过两个导正板之间的距离设置,在夹料臂竖直方向转动使得夹料臂进入两个导正板之间的过程中,
两个导正板能够引导夹料臂上的片状工件,从而实现第一次定位,随后随后在置物架推动夹料臂上的片状工件使其输送至物料平台的正上方的过程中,两个导正板能够对片状工件进行第二次定位,利于保障片状工件输送的准确性。
11.作为上述技术方案的进一步改进,所述夹槽的开口呈v形,利于工人将片状工件从夹槽的开口放入夹槽内,降低了夹料臂上片状工件的放置难度,利于提高工作效率。
12.本实用新型与现有技术相比,具有以下优点和效果:
13.本实用新型通过翻料机构和送料机构配合使用,使得依次放置到夹料臂上的片状工件能够以“一正面一反面”的规律被置物架推送至指定位置,结构紧凑且避免了人工装箱环节中每隔一次需进行片状工件换向装箱的操作,降低了工作量,利于提高装箱工作的效率。
14.同时,通过翻料机构实现对片状工件的翻面和输送,保证了后续片状工件叠放装箱时片状工件之间对合的准确性,避免了人工处理中存在的错放情况,利于保障后续片状工件的装箱质量。
附图说明
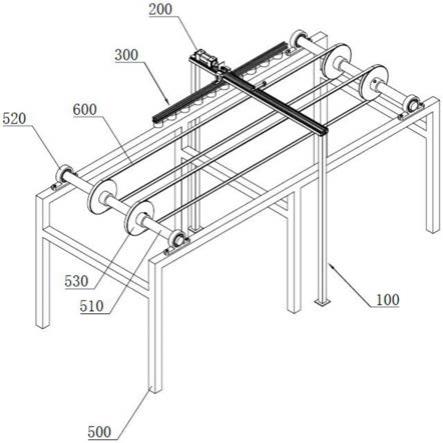
15.图1是本实用新型一种片状工件对合放料机构正面的结构示意图。
16.图2是本实用新型一种片状工件对合放料机构的结构示意俯视图。
17.图3是图2中所示两个导正板之间的结构示意图。
18.图4是图3中所示a的结构示意图。
19.图5是本实用新型一种片状工件对合放料机构侧面的结构示意图。
20.其中,机架1,导正板11,翻料机构2,夹料臂21,第一驱动装置22,第二驱动装置 23,齿轮齿条传动机构24,直臂部25,夹槽26,送料机构3,置物架31,直线驱动装置 32,架体33,推块34。
具体实施方式
21.下面结合附图并通过实施例对本实用新型作进一步的详细说明,以下实施例是对本实用新型的解释而本实用新型并不局限于以下实施例。
22.参见图1-图3,本实施例一种片状工件对合放料机构,包括机架1,所述机架1上依次设置有翻料机构2和送料机构3,翻料机构2包括用于片状工件放置的夹料臂21和用于驱动夹料臂21水平方向上转动的第一驱动装置22,送料机构3包括置物架31和用于驱动置物架31水平方向上移动的直线驱动装置32,直线驱动装置32固定于机架1上,机架1上固定有用于驱动翻料机构2竖直方向上转动的第二驱动装置23,以使得夹料臂21上的片状工件能够位于置物架31的移动轨迹上。
23.本实施例中,第一驱动装置22为旋转气缸,第二驱动装置23为线性气缸,夹料臂21 固定于旋转气缸的旋转台上,线性气缸固定于机架1上,线性气缸的活塞杆和旋转气缸的缸筒之间通过齿轮齿条传动机构24实现连接,如图3中所示,齿轮齿条传动机构24包括相啮合的齿轮和齿条,齿条固定于活塞杆上,齿轮固定于缸筒上,线性气缸上活塞杆推动齿条直线移动时,齿条带动齿轮转动,从而使得旋转气缸连同夹料臂21转动,实现夹料臂 21在竖直方向上的转动。
24.本实施例中,直线驱动装置32为直线滑台,置物架31固定于直线滑台的滑台上。
25.参见图2、图3,所述夹料臂21呈u形状,夹料臂21上两个直臂部25的相对的位置上均开设有夹槽26,夹槽26的开口呈v形,片状工件位于夹料臂21上时,片状工件的两端分别位于两个夹槽26内。
26.参见图2、图4,所述置物架31包括架体33和两个用于推送片状工件的推块34,架体 33呈u形状,两个推块34以架体33的轴线为对称线呈左右对称固定于架体33上。
27.参见图2、图5,所述机架1上固定有两个导正板11,两个导正板11分别位于夹料臂 21的移动轨迹的两侧,两个导正板11之间的距离在竖直方向上从上往下依次由宽变窄并在水平方向上沿夹料臂21上片状工件被置物架31推出的方向依次由宽变窄
28.综上所述,本实用新型使用方法如下:
29.步骤一:从制造出来的同方向放置的片状工件中取一件放置于夹料臂上,使得片状工件的两端分别位于夹料臂的两个直臂部的夹槽内;
30.步骤二:通过第一驱动装置驱动夹料臂水平方向上转动180
°
,随后通过第二驱动装置使得第一驱动装置竖直方向上转动90
°
,使得夹料臂转动至置物架的正上方,此时夹料臂上的片状工件位于置物架上推块的移动轨迹上,且在夹料臂竖直方向上转动的过程中,夹料臂上的片状工件在两个导正板的作用下导正,进行第一次定位;
31.步骤三:通过直线驱动装置驱动置物架水平方向上直线移动,在置物架的移动过程中,推块抵住片状工件,使得推块能够将片状工件从夹料臂上推出脱离并使其随同置物架直线移动,直至片状工件被置物架输送至指定位置上,且在置物架水平方向上直线移动推送片状工件的过程中,片状工件在两个导向板的作用下导正,进行第二次定位;
32.步骤四:通过直线驱动装置驱动置物架复位,同时重复步骤一,然后通过第二驱动装置使得夹料臂竖直方向上转动90
°
,使得夹料臂转动至置物架的正上方,此时夹料臂上的片状工件位于置物架的移动轨迹上,且在夹料臂竖直方向上转动的过程中,夹料臂上的片状工件在两个导正板的作用下导正,进行第一次定位,随后重复步骤三;
33.步骤五:重复步骤一至步骤四,使得制造出来的同方向放置的片状工件以“一正面一反面”的规律被输送至指定位置上,从而在后续装箱环节能够直接依次叠放装箱。
34.本说明书中所描述的以上内容仅仅是对本实用新型所作的举例说明。本实用新型所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,只要不偏离本实用新型说明书的内容或者超越本权利要求书所定义的范围,均应属于本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。