1.本实用新型涉及机械手领域,具体涉及智能装备用机械手。
背景技术:
2.机械手是最早出现的工业机器人,也是最早出现的现代机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,在机械制造、冶金、电子、轻工和原子能等部门的生产中,要用到智能数控机械手自动一体化生产装备。
3.现有的智能数控机械手自动一体化生产装备结构简单,通常在使用时一个机械手装备只能实现单一的取料或运料功能,从而在整个加工过程中需要使用到多个机械手,造成使用成本以及场地的增加,为此,我们提出一种智能数控机械手自动一体化生产装备。
4.公告号cn214981050u的中国专利公开了一种智能数控机械手自动一体化生产装备,但该灯带连接结构还存在以下方面的问题:机械手本体在取料或运料时,不够方便,成本较高。
技术实现要素:
5.本实用新型的目的是解决以上缺陷,提供智能装备用机械手。
6.本实用新型的目的是通过以下方式实现的:智能装备用机械手,包括支架组件、机械手本体和电控组件,电控组件安装于支架组件的表面,支架组件包括支架杆和连接杆,连接杆安装于支架杆的一端,电控组件包括主控箱、伸缩杆和气缸,主控箱套装于支架杆的表面,气缸安装于主控箱的侧面,伸缩杆安装于连接杆和气缸之间,所述机械手本体安装于连接杆的一端,机械手本体与连接杆之间连接有滑道导轨,滑道导轨的两端设有电磁铁,电磁铁沿机械手本体的方向延伸,机械手本体靠近电磁铁的端面设有磁块。
7.上述说明中,作为进一步的方案,所述连接杆包括横向连接杆和纵向连接杆,纵向连接杆安装于横向连接杆的一端,支架杆安装于横向连接杆的另一端,纵向连接杆与横向连接杆之间通过转轴进行连接。
8.上述说明中,作为进一步的方案,所述气缸包括横向气缸和纵向气缸,横向气缸安装于横向连接杆的表面,纵向气缸安装于主控箱的侧面。
9.上述说明中,作为进一步的方案,所述伸缩杆包括横向伸缩杆和纵向伸缩杆,横向伸缩杆安装于横向气缸与纵向连接杆之间,纵向伸缩杆安装于横向连接杆与纵向气缸之间。
10.上述说明中,作为进一步的方案,所述横向气缸与主控箱之间设有排线管,排线管分别沿电磁铁、横向气缸和主控箱方向延伸。
11.上述说明中,作为进一步的方案,所述支架杆的下端设有底座,底座与支架杆进行固定连接。
12.本实用新型所产生的有益效果如下:所述机械手本体安装于连接杆的一端,机械手本体与连接杆之间连接有滑道导轨,机械手本体可沿滑道导轨进行滑动完成取料或运料
工作;所述滑道导轨的两端设有电磁铁,电磁铁沿机械手本体的方向延伸,电磁铁供电时,可吸引机械手本体靠近电磁铁,完成取料或运料工作;整体结构简单,完成取料或运料工作的精确度高,且成本较低,易受到大众的青睐。
附图说明
13.图1为本实用新型实施例中的主视图;
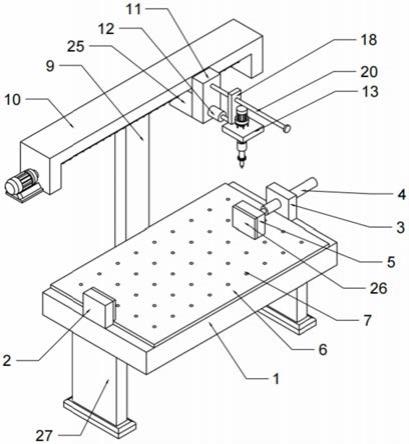
14.图2为本实用新型实施例中的立体结构示意图;
15.图中:1-横向连接杆,2-纵向伸缩杆,3-纵向气缸,4-主控箱,5-支架杆,6-底座,7-排线管,8-横向气缸,9-横向伸缩杆,10-转轴,11-纵向连接杆,12-滑道导轨,13-机械手本体,14-磁块,15-电磁铁。
具体实施方式
16.为了便于本领域技术人员的理解,下面结合实施例与附图对本实用新型作进一步的说明,实施方式提及的内容并非对本实用新型的限定。以下结合附图对本实用新型进行详细的描述。
17.请参阅图1-2,其具体实施的智能装备用机械手,包括支架组件、机械手本体13和电控组件,电控组件安装于支架组件的表面,支架组件包括支架杆5和连接杆,连接杆安装于支架杆5的一端,电控组件包括主控箱4、伸缩杆和气缸,主控箱4套装于支架杆5的表面,气缸安装于主控箱4的侧面,伸缩杆安装于连接杆和气缸之间。
18.支架杆5的下端设有底座6,底座6与支架杆5进行固定连接。连接杆包括横向连接杆1和纵向连接杆11,纵向连接杆11安装于横向连接杆1的一端,支架杆5安装于横向连接杆1的另一端,纵向连接杆11与横向连接杆1之间通过转轴10进行连接。气缸包括横向气缸8和纵向气缸3,横向气缸8安装于横向连接杆1的表面,纵向气缸3安装于主控箱4的侧面。伸缩杆包括横向伸缩杆9和纵向伸缩杆2,横向伸缩杆9安装于横向气缸8与纵向连接杆11之间,纵向伸缩杆2安装于横向连接杆1与纵向气缸3之间。横向气缸8与主控箱4之间设有排线管7,排线管7分别沿电磁铁15、横向气缸8和主控箱4方向延伸。所述机械手本体13安装于连接杆的一端,机械手本体13与连接杆之间连接有滑道导轨12,滑道导轨12的两端设有电磁铁15,电磁铁15沿机械手本体13的方向延伸,机械手本体13靠近电磁铁15的端面设有磁块14。
19.本实用新型实施例的工作原理即为控制箱控制电磁铁15吸引机械手本体13沿着滑道导轨12抓取物品;控制箱通过横向气缸8控制纵向伸缩杆2,控制横向连接杆1;控制箱通过纵向气缸3控制横向伸缩杆9,控制纵向连接杆11。
20.以上内容是结合具体的进一步实施例对本实用新型所作的进一步详细说明,不能认定本实用新型的具体实施只局限于这些说明。对于本实用新型所属技术领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可做出若干简单推演或替换,都应视为本实用新型的保护范围。
技术特征:
1.智能装备用机械手,包括支架组件、机械手本体和电控组件,电控组件安装于支架组件的表面,支架组件包括支架杆和连接杆,连接杆安装于支架杆的一端,电控组件包括主控箱、伸缩杆和气缸,主控箱套装于支架杆的表面,气缸安装于主控箱的侧面,伸缩杆安装于连接杆和气缸之间,其特征在于,所述机械手本体安装于连接杆的一端,机械手本体与连接杆之间连接有滑道导轨,滑道导轨的两端设有电磁铁,电磁铁沿机械手本体的方向延伸,机械手本体靠近电磁铁的端面设有磁块。2.根据权利要求1所述智能装备用机械手,其特征在于,所述连接杆包括横向连接杆和纵向连接杆,纵向连接杆安装于横向连接杆的一端,支架杆安装于横向连接杆的另一端,纵向连接杆与横向连接杆之间通过转轴进行连接。3.根据权利要求2所述智能装备用机械手,其特征在于,所述气缸包括横向气缸和纵向气缸,横向气缸安装于横向连接杆的表面,纵向气缸安装于主控箱的侧面。4.根据权利要求3所述智能装备用机械手,其特征在于,所述伸缩杆包括横向伸缩杆和纵向伸缩杆,横向伸缩杆安装于横向气缸与纵向连接杆之间,纵向伸缩杆安装于横向连接杆与纵向气缸之间。5.根据权利要求3所述智能装备用机械手,其特征在于,所述横向气缸与主控箱之间设有排线管,排线管分别沿电磁铁、横向气缸和主控箱方向延伸。6.根据权利要求1所述智能装备用机械手,其特征在于,所述支架杆的下端设有底座,底座与支架杆进行固定连接。
技术总结
本实用新型涉及机械手领域的智能装备用机械手,所述机械手本体安装于连接杆的一端,机械手本体与连接杆之间连接有滑道导轨,机械手本体可沿滑道导轨进行滑动完成取料或运料工作;所述机械手本体安装于连接杆的一端,机械手本体与连接杆之间连接有滑道导轨,滑道导轨的两端设有电磁铁,电磁铁沿机械手本体的方向延伸,机械手本体靠近电磁铁的端面设有磁块。所述滑道导轨的两端设有电磁铁,电磁铁沿机械手本体的方向延伸,电磁铁供电时,可吸引机械手本体靠近电磁铁,完成取料或运料工作;整体结构简单,完成取料或运料工作的精确度高,且成本较低,易受到大众的青睐。易受到大众的青睐。易受到大众的青睐。
技术研发人员:姚曦 曾小健 王强 史明忠 魏坤平
受保护的技术使用者:东莞市三航军民融合创新研究院
技术研发日:2021.12.30
技术公布日:2022/5/24
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。