1.本实用新型涉及智能小车技术领域,特别是涉及一种基于动能转换电能的储能智能小车。
背景技术:
2.近年来,电动车被广泛应用于生活当中,其具有方便快捷、低碳环保等优点,在人工智能技术的驱动下,车路协同、自动驾驶等概念已深入人心,为了让当代的学龄儿童更加直观地接触人工智能技术,手势感应变形遥控车、智能小车机器人等如雨后春笋般出现,但这些智能小车几乎都是充电型或者是电池供电型,都是耗能型的驱动模式。基于上述技术问题,本领域的技术人员亟需研发一种能够减少动能损耗、提高蓄电池组使用寿命的智能小车。
技术实现要素:
3.本实用新型的目的是提供一种基于动能转换电能的储能智能小车,利用动能转化为电能,能够减少动能损耗、提高蓄电池组使用寿命。
4.为实现上述目的,本实用新型提供了如下方案:
5.一种基于动能转换电能的储能智能小车,包括:小车本体以及搭载在小车本体上的储能控制系统,所述储能控制系统包括控制器、四个减速电机、电容储能元件,四个减速电机驱动连接四个轮子,设置在小车本体的底部,充电模式下,四个减速电机作为发电机使用,运动模式下,其中,前侧两个减速电机作为电动机使用;所述控制器分别与四个减速电机电性连接,四个减速电机的正负极并联设置,并与电容储能元件并联连接,电容储能元件用于储能;所述电容储能元件连接自动升降压模块,所述自动升降压模块连接作为电动机的两个减速电机,所述自动升降压模块用于提供稳定电源;作为电动机的两个减速电机连接由2个自锁开关构成的电机切换模块,所述电机切换模块分别连接电机驱动模块和电容储能元件,实现运动模式和充电模式的切换,所述电机驱动模块与控制器电性连接。
6.进一步的,四个减速电机的正负极并联有充电指示灯。
7.进一步的,所述充电指示灯串联有一个保护电阻,所述保护电阻采用10k电阻。
8.进一步的,所述电容储能元件包括串联的两个3v、1f的法拉电容。
9.进一步的,四个减速电机与电容储能元件之间串联有整流二极管,所述整流二极管用于防止电容储能元件充的电能回流到减速电机中。
10.进一步的,所述小车本体上还设置有显示屏、红外循迹模块、测速仪、距离传感器,所述显示屏、红外循迹模块、测速仪、距离传感器分别与控制器电性连接,所述自动升降压模块分别与显示屏、红外循迹模块、测速仪、距离传感器、控制器以及电机驱动模块连接,用于提供稳定电源。
11.进一步的,所述红外循迹模块设置有2个,分别位于所述小车主体的前端左右两侧。
12.进一步的,所述控制器为arduino主控芯片,所述自动升降压模块为tps63020自动升降压电源模块,用于将1.8v到5.5v的输入电压,转化为3.3v的稳定电压。
13.进一步的,所述四个减速电机驱动连接的四个轮子设置在小车本体的后端,所述小车本体的前端底部设置有辅助轮。
14.根据本实用新型提供的具体实施例,本实用新型公开了以下技术效果:本实用新型提供的基于动能转换电能的储能智能小车,首先,充电模式下,利用4路减速电机在人力推动过程电机的快速转动产生电能,将该电能储存在电容储能元件中的超级法拉电容中,完成小车的充电过程,实现动能转化为电能,为小车运动储备电能,充电过程中可以设置充电指示灯显示;完成一次充电过程,能给2个3v1f串联后的法拉电容充入约为5v电,由于法拉电容体积非常小且重量轻,大大的减轻了小车的重量,减少了能源的消耗;其次,完成充电的法拉电容,在给储能智能小车提供电能时电压会逐渐降低,因此,运动模式下,在已完成充电后的法拉电容作为储能智能小车电源时,通过自动升降压模块(例如tps63020自动升降压电源模块)将不断变化的法拉电容电压转换为稳定电源,可供小车工作和运动使用;本技术提供的储能智能小车充电快速,释放能量较高,充分实现了能源的高效利用。
附图说明
15.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
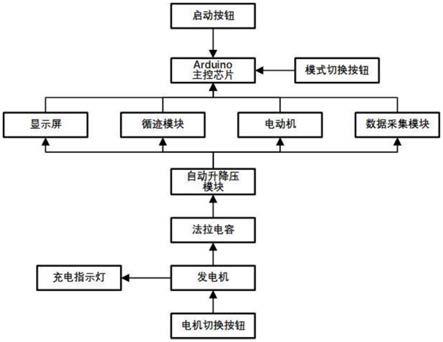
16.图1为本实用新型实施例基于动能转换电能的储能智能小车的控制框图;
17.图2为本实用新型实施例充电模式和运动模式的切换电路图;
18.图3为本实用新型实施例充电模式的电路图;
19.图4为本实用新型实施例运动模式的电路图;
20.图5为本实用新型实施例放电电路原理图;
21.图6为本实用新型实施例arduino主控芯片的电路图;
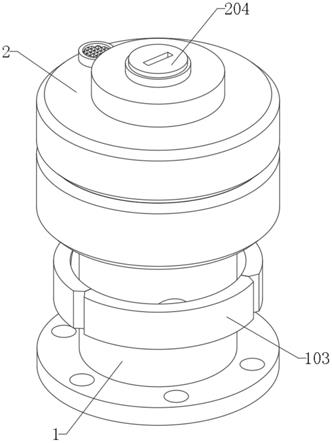
22.图7为本实用新型实施例基于动能转换电能的储能智能小车的结构示意图;
23.图8为本实用新型实施例基于动能转换电能的储能智能小车的工作原理示意图。
具体实施方式
24.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
25.本实用新型的目的是提供一种基于动能转换电能的储能智能小车,利用动能转化为电能,能够减少动能损耗、提高蓄电池组使用寿命。
26.为使本实用新型的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本实用新型作进一步详细的说明。
27.如图1-图8所示,本实用新型实施例提供的基于动能转换电能的储能智能小车,包
括:小车本体以及搭载在小车本体上的储能控制系统,所述储能控制系统包括控制器、四个减速电机、电容储能元件,四个减速电机驱动连接四个轮子,设置在小车本体的底部,充电模式下,四个减速电机作为发电机使用,运动模式下,其中,前侧对称的两个减速电机作为电动机使用;所述控制器分别与四个减速电机电性连接,四个减速电机的正负极并联设置,并与电容储能元件并联连接,电容储能元件用于储能;所述电容储能元件连接自动升降压模块,所述自动升降压模块连接作为电动机的两个减速电机,所述自动升降压模块用于提供稳定电源;作为电动机的两个减速电机连接由2个自锁开关构成的电机切换模块,所述电机切换模块分别连接电机驱动模块和电容储能元件,实现运动模式和充电模式的切换,所述电机驱动模块与控制器电性连接。
28.上述小车的发电机与电动机属于同种电机,共用到4个减速电机,在动能转换电能的储能环节是4个减速电机作为发电机同时工作;切换到运动模式后是前侧的2个减速电机作为电动机运行,也就是后侧两个减速电机始终作为发电机,前侧两个减速电机在发电机和电动机之间切换使用。所述四个减速电机设置在小车本体的后端,所述小车本体的前端底部设置有辅助轮。自动升降压模块输出3.3v向小车上的元件提供稳定电源。
29.其中,四个减速电机的正负极并联有一个充电指示灯,充电指示灯串联有一个10k电阻,起到保护指示灯的作用。所述电容储能元件包括串联的两个3v、1f的法拉电容。
30.如图2所示,四个减速电机与电容储能元件之间串联有整流二极管,所述整流二极管用于防止电容储能元件充的电能回流到减速电机中。所述小车本体上还设置有显示屏、红外循迹模块、测速仪、距离传感器,所述显示屏、红外循迹模块、测速仪、距离传感器分别与控制器电性连接,所述自动升降压模块分别与显示屏、红外循迹模块、测速仪、距离传感器、控制器以及电机驱动模块连接,用于提供稳定电源。所述红外循迹模块设置有2个,分别位于所述小车主体的前端左右两侧。所述控制器为arduino主控芯片,所述自动升降压模块为tps63020自动升降压电源模块。
31.电机驱动电路模块接收arduino主控芯片命令控制电机运动,电机切换电路由2个自锁开关构成,分别控制电机在发电模式与运动模式两种模式的转换,未按下时,前侧两个减速电机的两个正负极(已知小车前进电机时产生的电压区分正负极)与后侧作为发电机的两个减速电机并联,按下时正负极与电机驱动模块输出端连接。充电时,4个减速电机导线正极与正极并联、负极与负极并联。将正极导线与整流二极管相连接,在把整流二极管与法拉电容(2个串联的1f3v法拉电容)正极相连。整流二极管的作用是防止法拉电容充的电能回流到电机中。法拉电容正极连接一个自锁开关按钮(电源开关)后将正负极分别与自动升降压模块输入端正负极并联。自动升降压模块输出端作为稳定的3.3v电源分别连接arduino主控芯片、电机驱动模块、显示屏、红外循迹模块、测速仪、距离传感器等元器件。
32.如图3所示,充电模式下,由4个减速电机提供电能。减速电机将电机导线向前推动时的正负极区分清楚,并将所有电机导线正极与正极并联、负极与负极并联。将正极导线与整流二极管相连接,在把整流二极管与法拉电容正极相连。整流二极管的作用是防止法拉电容充的电能回流到电机中。在电机正负极直接并联一个充电指示灯,10k电阻起到保护指示灯的作用。
33.如图4所示,电机切换模块由2个6脚自锁开关按钮组成,当按钮没被按下时,接3、4引脚,两个可切换模式的减速电机正负极分别与其他2个充电模式的发电机正负极并联,此
时有4个电机可以给超级法拉电容充电。当按钮被按下时,接1、6引脚,两个可切换模式的减速电机正负极同时被切换到与2路电机驱动模块连接,此时有2个电机作为电动机可以给小车提供行驶动力。
34.如图5所示,所述自动升降压模块保持电压稳定的方法如下:
35.步骤1,超级法拉电容正负极分别与自动升降压模块输入端正负极相连接;
36.步骤2,其他需要供电的元器件都与自动升降压模块输出端正负极相连接;
37.步骤3,按下启动按钮。
38.完成一次充电过程,能给2个3v1f串联后的法拉电容充入约为5v电。完成充电的法拉电容,在给储能小车提供电能时电压会逐渐降低。arduino最小系统、红外循迹模块、显示屏、红外测速模块(测速仪)、距离传感器和电机驱动模块工作电压3.3v,且需要稳定的电源电压。因此,在已完成充电后的法拉电容作为储能小车电源时,需要将不断变化的法拉电容电压转换为稳定的3.3v。tps63020自动升降压电源模块就可解决该问题,它能将1.8v到5.5v的输入电压,转化为3.3v的稳定电压。
39.如图6和图8所示,arduino主控芯片连接有模式切换电路,步骤1,接通模式切换电路;步骤2,按动电源开关按钮,arduino主控芯片判断运行模式并运行;步骤3,小车运行相应选择后的模式。
40.模式切换电路由arduino最小系统和自锁开关按钮组成。按下自锁开关按钮接通3.3v小车处于循迹模式、未按下自锁开关按钮接通0v(gnd)小车处于直线运行模式。按动启动按钮,系统通电后arduino主控芯片pd3引脚检测到低电平判断为直线运行模式,检测到高电平判断为循迹运行模式。
41.直线运行模式包括以下步骤:
42.步骤1:减速电机切换至运动模式;
43.步骤2:选择直线运行模式;
44.步骤3:按动启动按钮。
45.启动电源开关小车静止1s后延直线向前行驶,直至法拉电容电压不能提供3.3v电源电压为止,此时小车停在移动显示屏逐渐熄灭。直线运行过程中3.3v的电压给电机驱动模块,获取的到能量有限,选择2路电机驱动模块驱动2个电机作为小车的驱动。显示屏的距离显示数据是由红外测速模块采集数据。1个车轮转动一圈约为22cm,车轮转动一圈红外测速模块可以产出20个脉冲值,通过计算红外测速模块每产生一个脉冲小车行驶1.1cm。使用arduino对红外测速模块脉冲值进行计数并计算就能采集小车的行驶距离,并将数据显示在显示屏上。
46.循迹运行模式包括以下步骤:
47.步骤1:减速电机切换至运动模式;
48.步骤2:选择循迹运行模式。
49.步骤3:按动启动按钮。
50.启动电源开关小车静止1s后小车开始启动,若右侧循迹模块检测到黑线则左侧电机转动、右侧电机停止转动;若左侧循迹模块检测到黑线则左侧电机转动、右侧电机停止转动;若左侧与右侧循迹模块没检测到黑线则左、右两侧电机同时转动,直至电源电压不足3.3v小车停止。
51.本实用新型提供的基于动能转换电能的储能智能小车,首先,充电模式下,利用4路减速电机在人力推动过程电机的快速转动产生电能,将该电能储存在电容储能元件中的超级法拉电容中,完成小车的充电过程,实现动能转化为电能,为小车运动储备电能,充电过程中可以设置充电指示灯显示;完成一次充电过程,能给2个3v1f串联后的法拉电容充入约为5v电,由于法拉电容体积非常小且重量轻,大大的减轻了小车的重量,减少了能源的消耗;其次,完成充电的法拉电容,在给储能智能小车提供电能时电压会逐渐降低,因此,运动模式下,在已完成充电后的法拉电容作为储能智能小车电源时,通过自动升降压模块(例如tps63020自动升降压电源模块)将不断变化的法拉电容电压转换为稳定电源,可供小车工作和运动使用;本技术提供的储能智能小车充电快速,释放能量较高,充分实现了能源的高效利用。
52.本文中应用了具体个例对本实用新型的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本实用新型的方法及其核心思想;同时,对于本领域的一般技术人员,依据本实用新型的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本实用新型的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。